技术特征:
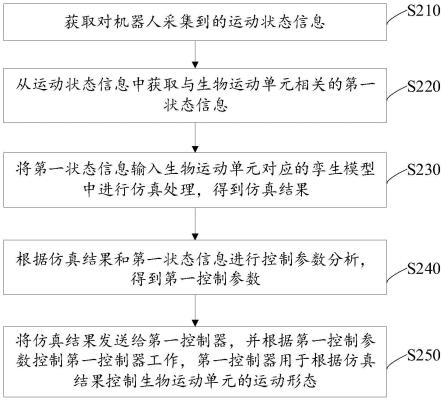
1.一种机器人的控制方法,其特征在于,所述机器人包括m个生物运动单元,m为正整数,所述生物运动单元为采用生物材料的运动单元,所述方法包括:获取对所述机器人采集到的运动状态信息;从所述运动状态信息中获取与所述生物运动单元相关的第一状态信息;将所述第一状态信息输入所述生物运动单元对应的孪生模型中进行仿真处理,得到仿真结果,其中,所述孪生模型用于建立所述生物运动单元的不同状态信息之间的映射关系;根据所述仿真结果和所述第一状态信息进行控制参数分析,得到第一控制参数;将所述仿真结果发送给所述第一控制器,并根据所述第一控制参数控制所述第一控制器工作,所述第一控制器用于根据所述仿真结果控制所述生物运动单元的运动形态。2.根据权利要求1所述的方法,其特征在于,所述将所述第一状态信息输入所述生物运动单元对应的孪生模型中进行仿真处理,得到仿真结果,包括:将所述第一状态信息分为输入状态信息以及参考状态信息;将所述输入状态信息输入所述生物运动单元对应的孪生模型中进行仿真处理,得到仿真状态信息;所述根据所述仿真结果和所述第一状态信息进行控制参数分析,得到第一控制参数,包括:根据所述仿真状态信息和所述参考状态信息,生成偏差信息;获取所述生物运动单元对应的当前控制参数;根据所述偏差信息对所述当前控制参数进行调整,得到第一控制参数。3.根据权利要求1所述的方法,其特征在于,所述机器人还包括n个机电运动单元,n为正整数;所述获取对所述机器人采集到的运动状态信息之后,所述方法还包括:根据所述运动状态信息,为所述第一控制器分配第一控制策略,并为第二控制器分配第二控制策略;将所述第一控制策略发送给所述第一控制器,所述第一控制器还用于根据所述第一控制策略控制所述生物运动单元工作;将所述第二控制策略发送给所述第二控制器,所述第二控制器用于根据所述第二控制策略控制所述机电运动单元工作。4.根据权利要求3所述的方法,其特征在于,所述根据所述运动状态信息,为所述第一控制器分配第一控制策略,并为第二控制器分配第二控制策略,包括:生成输入集合,所述输入集合包括多种输入向量,每种所述输入向量包括所述第一控制器对应的第一控制信息和所述第二控制器对应的第二控制信息;根据所述输入集合、所述运动状态信息和预设的损失函数,计算每种所述输入向量对应的损失值;从所述输入集合中获取损失值最小的输入向量,以作为目标向量;取所述目标向量中包括的第一控制信息作为所述第一控制器的第一控制策略,并取所述目标向量中包括的第二控制信息作为所述第二控制器的第二控制策略。5.根据权利要求3所述的方法,其特征在于,所述方法还包括:获取对所述机器人所处环境采集到的环境信息;根据所述环境信息进行运动规划,得到所述机器人的运动规划信息;
所述根据所述运动状态信息,为所述第一控制器分配第一控制策略,并为第二控制器分配第二控制策略,包括:根据所述运动状态信息,并结合所述运动规划信息,为所述第一控制器分配第一控制策略,并为第二控制器分配第二控制策略。6.根据权利要求5所述的方法,其特征在于,所述运动规划信息包括所述生物运动单元对应的第一驱动模式、所述机电运动单元对应的第二驱动模式和运动约束条件;所述根据所述环境信息进行运动规划,得到所述机器人的运动规划信息,包括:根据所述环境信息,分析当前应用场景;获取与所述当前应用场景匹配的运动形态信息,所述运动形态信息用于确定所述机器人的目标运动形态;根据所述运动形态信息,获取所述生物运动单元对应的第一驱动模式和所述机电运动单元对应的第二驱动模式,其中,当所述生物运动单元以所述第一驱动模式工作且所述机电运动单元以所述第二驱动模式工作时,所述机器人以所述目标运动形态运动;根据所述运动形态信息,生成所述运动约束条件。7.根据权利要求3至6任一项所述的方法,其特征在于,所述机电运动单元包括支撑部和传动部,所述支撑部与所述传动部连接,所述传动部与所述第二控制器连接,所述支撑部通过第一基底部与所述生物运动单元连接。8.一种机器人的控制系统,其特征在于,所述机器人包括m个生物运动单元,m为正整数,所述生物运动单元为采用生物材料的运动单元,所述系统包括:协同控制器,用于获取对所述机器人采集到的运动状态信息;从所述运动状态信息中获取与所述生物运动单元相关的第一状态信息;将所述第一状态信息输入所述生物运动单元对应的孪生模型中进行仿真处理,得到仿真结果,其中,所述孪生模型用于建立所述生物运动单元的不同状态信息之间的映射关系;根据所述仿真结果和所述第一状态信息进行控制参数分析,得到第一控制参数;将所述仿真结果发送给所述第一控制器,并根据第一控制参数控制第一控制器工作;第一控制器,用于根据所述仿真结果控制生物运动单元的运动形态。9.根据权利要求8所述的系统,其特征在于,所述机器人还包括n个机电运动单元,n为正整数,所述系统还包括第二控制器,其中:所述协同控制器,还用于根据所述运动状态信息,为所述第一控制器分配第一控制策略,并为第二控制器分配第二控制策略;将所述第一控制策略发送给所述第一控制器,并将所述第二控制策略发送给所述第二控制器;所述第一控制器,还用于根据所述第一控制策略控制所述生物运动单元工作;所述第二控制器,用于根据所述第二控制策略控制所述机电运动单元工作。10.一种电子设备,其特征在于,所述电子设备包括存储器、处理器、存储在所述存储器上并可在所述处理器上运行的程序以及用于实现所述处理器和所述存储器之间的连接通信的数据总线,所述程序被所述处理器执行时实现如权利要求1至7任一项所述机器人的控制方法的步骤。
技术总结
一种机器人的控制方法及系统、电子设备,属于机器人控制技术领域。其中,机器人包括M个生物运动单元,M为正整数,生物运动单元为采用生物材料的运动单元,该方法包括:获取对机器人采集到的运动状态信息;从运动状态信息中获取与生物运动单元相关的第一状态信息;将第一状态信息输入生物运动单元对应的孪生模型中进行仿真处理,得到仿真结果,其中,孪生模型用于建立生物运动单元的不同状态信息之间的映射关系;根据仿真结果和第一状态信息进行控制参数分析,得到第一控制参数;根据第一控制参数控制第一控制器工作,第一控制器用于控制生物运动单元的运动形态,因此能够提高对机器人的控制精细度,进而灵活适应于多种复杂的应用环境。环境。环境。
技术研发人员:陈丽燕 毕盛 席宁 陈和平 范兴刚
受保护的技术使用者:嘉兴市敏硕智能科技有限公司
技术研发日:2022.08.09
技术公布日:2022/12/5
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。