1.本发明涉及地理信息、建筑信息模型和计算机图形领域,具体涉及一种利用移动终端和地理三维场景识别空间目标的方法。
背景技术:
2.在外业测量与调查、应急灾害处置中,经常需要快速识别某个建筑物的基本属性(名称、结构信息、权属信息等)。在现有建筑物相关的gis数据、软件和设备技术支持下,调查者需要抵达目标附近,通过gis地图识别目标。
3.这就导致了问题:对于大量的立体目标,难以对其进行识别与信息获取。例如:高层建筑物某处出现烟雾,调查者想获取该楼层房屋的基本信息,在无法到达烟雾处的情况下,调查工作难以开展。又如:调查人员需要在非接触情况下识别某建筑信息,通过拍照进行图像识别效果不佳,通过电子地图对比自动化程度低。
4.因此,本发明通过结合三维信息模型、地理空间场景和智能移动终端,提出了一种利用射线法进行非接触的目标识别的方法及设备。
技术实现要素:
5.本发明提出一种利用移动终端和地理三维场景识别空间目标的方法及设备方法,可在实际应用中,使用智能手机和pad快速识别外业目标属性,如建筑物、山体、大型设施等目标,从而减少查找图纸和资料的频率,提升识别效率。
6.本发明所要解决的技术问题采用以下的技术方案来实现:
7.一种利用移动终端和地理三维场景识别空间目标的方法,具体包括如下步骤:
8.步骤1、对区域进行三维信息模型创建或三维地图创建,将区域内的自然地貌、建筑物、构筑物等地理对象创建三维模型,并添加id、名称、类别等相关属性;
9.步骤2、采用三维gis框架搭建地理三维场景,该场景使用wgs84坐标系;
10.步骤3、目标识别时,通过终端设备的相机将照准目标物,获取手机镜头c的空间位置、镜头姿态方位角heading、镜头姿态俯仰角pitch、镜头姿态翻滚角roll;
11.步骤4、将该组数据(手机镜头c的空间位置、镜头姿态方位角heading、镜头姿态俯仰角pitch、镜头姿态翻滚角roll)传入三维场景,将场景中的虚拟相机设置成对应参数,即实现实际相机与场景相机的位置、高度和姿态的一致;
12.步骤5、使用三维场景相机的射线求交功能,拾取场景中的三维模型,获取到其属性。
13.有益效果:
14.本发明提出的一种利用移动终端和地理三维场景识别空间目标的方法及设备,发挥了智能移动终端的设备优势,可以提升三维信息模型的使用场景,提供非接触的、立体的空间目标识取方法。
附图说明
15.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图;
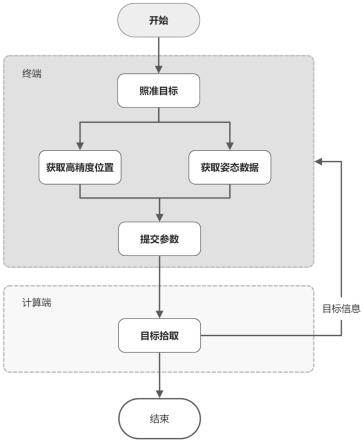
16.图1为本发明方法的流程图;
17.图2为射线法求交的几何关系图。
具体实施方式
18.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.如图1-2,一种利用移动终端和地理三维场景识别空间目标的方法,利用三维场景相机位置、姿态和实际场景中相机位置、姿态的一致性,借助几何射线实现空间目标的拾取。具体包含的工作有:
20.1.对区域进行三维信息模型创建或三维地图创建。将区域内的自然地貌、建筑物、构筑物等地理对象创建三维模型,并添加id、名称、类别等相关属性。
21.2.使用三维地图或三维信息模型,搭建基于计算机图形的三维虚拟场景。可以采用开源或商业三维gis框架(arcgis、cesium等)实现地理三维场景的快速搭建。该场景使用地理空间坐标系,wgs84大地坐标系。
22.3.在目标识别终端,硬件方面:采用集成了高精度定位模块(如实时差分定位技术的gnss-rtk)的智能手机或设备,包含相机、陀螺仪、指南针等常见组件;软件方面:应用程序可以实现对目标物的照准、实时高精度地理坐标的获取、实时设备姿态数据的获取。
23.4.现场数据采集
24.(1)对目标物的照准,是使用智能手机或其他终端,通过将目标物置于相机画面中央实现。
25.(2)实时地理坐标获取,是在照准目标后,调用智能系统(如android或ios)的相关api获取手机的空间位置(经度l、纬度b、大地高程h)。这些坐标值使用的坐标系也是地理空间坐标系,如wgs84大地坐标系、中国国家2000大地坐标系等,这样就保证了虚拟场景和现实世界坐标的一致性。
26.(3)实时设备姿态数据的获取,是在照准目标后,调用智能系统(如android或ios)的相关api获取此时的镜头姿态方位角heading、镜头姿态俯仰角pitch、镜头姿态翻滚角roll。
27.(4)然后将此时的地理坐标数据和设备姿态数据发送至三维虚拟场景系统中。该三维虚拟场景系统可以部署在服务器上,接收终端通过移动网络传来的现场参数。
28.5.三维虚拟场景系统使用相机的射线求交功能,拾取场景中的三维模型对象,从而获取到其详细信息。
29.关于射线法拾取目标,在当前主流的三维gis都支持该功能,如revit的
referenceintersector.find函数、threejs的raycaster.intersectobjects、cesium的scene.pickfromray函数等。
技术特征:
1.一种利用移动终端和地理三维场景识别空间目标的方法,其特征在于,具体包括如下步骤:步骤1、对区域进行三维信息模型创建或三维地图创建,将区域内的自然地貌、建筑物、构筑物地理对象创建三维模型,并添加id、名称、类别等相关属性;步骤2、采用三维gis框架搭建地理三维场景,该场景使用wgs84坐标系;步骤3、目标识别时,通过终端设备的相机将照准目标物,获取手机镜头c的空间位置、镜头姿态方位角heading、镜头姿态俯仰角pitch、镜头姿态翻滚角rol l;步骤4、将该组数据传入三维场景,将场景中的虚拟相机设置成对应参数,即实现实际相机与场景相机的位置、高度和姿态的一致;步骤5、使用三维场景相机的射线求交功能,拾取场景中的三维模型,获取到其属性。
技术总结
本发明公开了一种利用移动终端和地理三维场景识别空间目标的方法,对区域进行三维信息模型创建或三维地图创建,将区域内的地理对象创建三维模型,并添加ID、名称、类别相关属性;采用三维GIS框架搭建地理三维场景;通过终端设备的相机将照准目标物,获取数据;将该组数据传入三维场景,将场景中的虚拟相机设置成对应参数,即实现实际相机与场景相机的位置、高度和姿态的一致;使用三维场景相机的射线求交功能,拾取场景中的三维模型,获取到其属性。本发明提出的一种利用移动终端和地理三维场景识别空间目标的方法及设备,发挥了智能移动终端的设备优势,可以提升三维信息模型的使用场景,提供非接触的、立体的空间目标识取方法。立体的空间目标识取方法。立体的空间目标识取方法。
技术研发人员:戴玮 张耀允 孙莉 石睿 章群英 王晓雨 王少康 汪可燃 邵昀琦
受保护的技术使用者:公路交通节能与环保技术及装备交通运输行业研发中心
技术研发日:2022.09.05
技术公布日:2022/12/5
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。