一种双主ecu架构的制动系统控制架构及方法
技术领域
1.本发明涉及制动系统技术领域,具体地说是一种双主ecu架构的制动系统控制架构及方法。
背景技术:
2.传统的汽车制动系统控制多为单一ecu控制架构,随着自动驾驶技术应用越来越广泛,更加适配自动驾驶的干式制动技术emb应运而生,传统的单一ecu架构系统已经无法满足自动驾驶对冗余安全控制的需求。因此,在原有单一ecu架构系统的基础上,设计一套冗余ecu架构系统就显得尤为重要。
技术实现要素:
3.本发明为克服现有技术的不足,提供一种双主ecu架构的制动系统控制架构及方法,增加冗余ecu架构系统,具备多种模式的切换,提高了驾驶安全性能。
4.一种双主ecu架构的制动系统控制架构,包括踏板、踏板模拟器、中央控制器,其特征在于:踏板组件的末端连接踏板模拟器,所述的踏板模拟器上分别设有踏板位置传感器及踏板传感器,踏板位置传感器的信号输出端连接主ecu控制机构,踏板传感器的信号输出端连接冗余ecu控制机构;主ecu控制机构与冗余ecu控制机构之间通过can通讯线路一连接。
5.所述的主ecu控制机构包括中央控制器、emb控制器,所述的emb控制器设有4个,4个emb控制器分别设置在4个车轮上,中央控制器的输入端与踏板位置传感器的信号输出端连接,中央控制器的输出端通过can通讯线路二分别连接4个emb控制器。
6.所述的冗余ecu控制机构包括冗余中央控制器、emb控制器,所述的emb控制器设有4个,4个emb控制器分别设置在4个车轮上,冗余中央控制器的输入端与踏板传感器的信号输出端连接,冗余中央控制器的输出端通过can通讯线路三分别连接4个emb控制器。
7.所述的控制方法如下:s1,系统处于正常工作模式下,驾驶员的行车制动请求通过踏板模拟器的踏板位置传感器信号同时输入至主ecu控制机构的主中央控制器及冗余ecu控制机构的冗余中央控制器,4个emb控制器仅响应主中央控制器的行车制动指令;s2,当主ecu控制机构发生失效或者无应答时,4个emb控制器忽略主中央控制器的指令,驾驶员的行车制动请求通过踏板模拟器的踏板传感器信号同时输入至冗余ecu控制机构的冗余中央控制器,4个emb控制器响应冗余中央控制器的行车制动指令;s3,当踏板位置传感器失效或者无应答时,进行步骤s2;s4,当踏板传感器失效或者无应答时,进行步骤s1;s5,当踏板位置传感器及踏板传感器同时失效或者无应答时,驾驶员可通过拉起电子驻车系统的制动开关,主ecu控制机构的主中央控制器根据预设的行车制动减速程序对4个emb控制器发出制动指令。
8.本发明同现有技术相比,提供一种双主ecu架构的制动系统控制架构及方法,增加冗余ecu架构系统,具备多种模式的切换,提高了驾驶安全性能。
附图说明
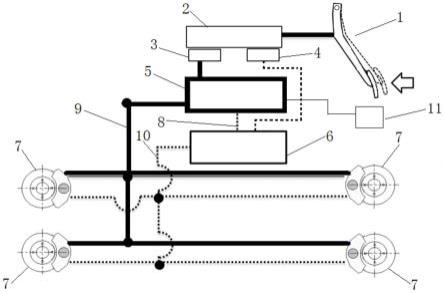
9.图1为本发明正常模式状态下的控制流程图。
10.图2为本发明在主ecu控制机构发生失效或无响应情况下的控制流程图。
11.图3为本发明两个踏板行程传感器发生失效或无响应情况下的控制流程图。
12.参见图1至图3,1为踏板组件,2为踏板模拟器,3为踏板位置传感器,4为踏板传感器,5为中央控制器,6为冗余中央控制器,7为emb控制器,8为can通讯线路一,9为can通讯线路二,10为can通讯线路三,11为制动开关。
具体实施方式
13.下面根据附图对本发明做进一步的说明。
14.如图1所示,踏板组件1的末端连接踏板模拟器2,所述的踏板模拟器2上分别设有踏板位置传感器3及踏板传感器4,踏板位置传感器3的信号输出端连接主ecu控制机构,踏板传感器4的信号输出端连接冗余ecu控制机构;主ecu控制机构与冗余ecu控制机构之间通过can通讯线路一8连接。
15.主ecu控制机构包括中央控制器、emb控制器,所述的emb控制器7设有4个,4个emb控制器7分别设置在4个车轮上,中央控制器5的输入端与踏板位置传感器3的信号输出端连接,中央控制器5的输出端通过can通讯线路二9分别连接4个emb控制器7。
16.冗余ecu控制机构包括冗余中央控制器、emb控制器,所述的emb控制器7设有4个,4个emb控制器7分别设置在4个车轮上,冗余中央控制器6的输入端与踏板传感器4的信号输出端连接,冗余中央控制器6的输出端通过can通讯线路三10分别连接4个emb控制器7。
17.如图1至图3所示,一种双主ecu架构的制动系统控制架构的控制方法,控制方法如下:s1,系统处于正常工作模式下,驾驶员的行车制动请求通过踏板模拟器2的踏板位置传感器3信号同时输入至主ecu控制机构的主中央控制器5及冗余ecu控制机构的冗余中央控制器6,4个emb控制器7仅响应主中央控制器5的行车制动指令;s2,当主ecu控制机构发生失效或者无应答时,4个emb控制器7忽略主中央控制器5的指令,驾驶员的行车制动请求通过踏板模拟器2的踏板传感器4信号同时输入至冗余ecu控制机构的冗余中央控制器6,4个emb控制器7响应冗余中央控制器6的行车制动指令;s3,当踏板位置传感器3失效或者无应答时,进行步骤s2;s4,当踏板传感器4失效或者无应答时,进行步骤s1;s5,当踏板位置传感器3及踏板传感器4同时失效或者无应答时,驾驶员可通过拉起电子驻车系统的制动开关11,主ecu控制机构的主中央控制器5根据预设的行车制动减速程序对4个emb控制器7发出制动指令。
18.本发明中的ecu为电子控制单元,emb为嵌入式存储器,epb为电子驻车系统,本发明的双主ecu架构的4轮干式电子机械制动系统,包含一个中央控制器5和一个冗余中央控制器6和4个轮边emb控制器7,以及双传感器的电子制动踏板,epb电子驻车开关等。
19.中央控制器由一个中央控制器5和一个冗余中央控制器6构成,两个中央控制器分别与踏板位置传感器3和踏板传感器4连接,同时进行制动控制运算,并分别通过两个can通讯线路与4个emb控制器7进行信号交互,即每个emb控制器7同时接收中央控制器5和冗余中央控制器6的信号。
20.电子驻车系统的制动开关11信号输入给中央控制器5,车辆静态时此开关作为电子驻车施加和解除的指令输入。
21.如图1所示,正常工作状态下,驾驶员的行车制动请求通过踏板模拟器2的踏板位置传感器3信号同时输入至主ecu控制机构的主中央控制器5及冗余ecu控制机构的冗余中央控制器6,4个emb控制器7仅响应主中央控制器5的行车制动指令。
22.如图2所示,车辆动态行车制动降级模式1:当主ecu控制机构发生失效或者无应答时,4个emb控制器7忽略主中央控制器5的指令,驾驶员的行车制动请求通过踏板模拟器2的踏板传感器4信号同时输入至冗余ecu控制机构的冗余中央控制器6,4个emb控制器7响应冗余中央控制器6的行车制动指令。
23.如图3所示,车辆动态行车制动降级模式2:当踏板位置传感器3及踏板传感器4同时失效或者无应答时,驾驶员可通过拉起电子驻车系统的制动开关11,主ecu控制机构的主中央控制器5根据预设的行车制动减速程序对4个emb控制器7发出制动指令。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。