技术特征:
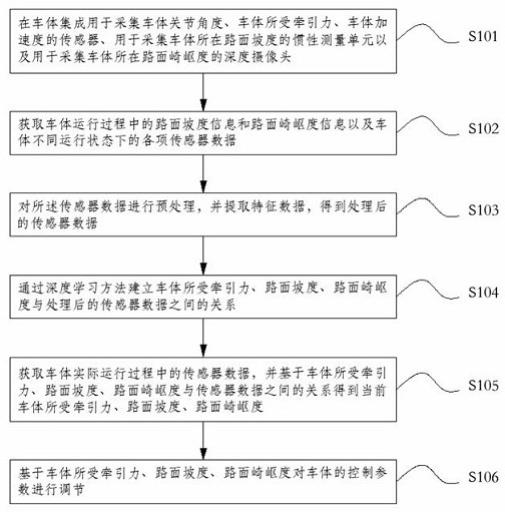
1.一种牵引式电动运载助力车控制方法,其特征在于:包括,在车体集成用于采集车体关节角度、车体所受牵引力、车体加速度的传感器、用于采集车体所在路面坡度的惯性测量单元以及用于采集车体所在路面崎岖度的深度摄像头;获取车体运行过程中的路面坡度信息和路面崎岖度信息以及车体不同运行状态下的各项传感器数据;对所述传感器数据进行预处理,并提取特征数据,得到处理后的传感器数据;通过深度学习方法建立车体所受牵引力、路面坡度、路面崎岖度与处理后的传感器数据之间的关系;获取车体实际运行过程中的传感器数据,并基于车体所受牵引力、路面坡度、路面崎岖度与传感器数据之间的关系得到当前车体所受牵引力、路面坡度、路面崎岖度;基于车体所受牵引力、路面坡度、路面崎岖度对车体的控制参数进行调节。2.根据权利要求1所述的方法,其特征在于:所述在车体集成用于采集车体关节角度、车体所受牵引力、车体加速度的传感器包括,在车体头部安装用于采集车体所受牵引力的力传感器;在车体关节处安装用于采集车体关节角度的角度传感器;在车体上安装用于采集车体加速度的加速度传感器。3.根据权利要求2所述的方法,其特征在于:所述力传感器包括一维力传感器和六维力传感器。4.根据权利要求1所述的方法,其特征在于:所述对传感器数据进行预处理包括,采用基于卡尔曼滤波传感器融合模型对所述传感器数据进行数据融合。5.根据权利要求1所述的方法,其特征在于:所述特征数据包括车体操作人员的身高信息和腰部负重信息。6.根据权利要求1所述的方法,其特征在于:所述基于车体所受牵引力、路面坡度、路面崎岖度对车体的控制参数进行调节包括,基于路面坡度信息对车体力矩输出进行补偿;基于路面崎岖度信息对车体系统刚度进行调节。7.一种牵引式电动运载助力车控制装置,其特征在于:包括,数据采集模块,用于获取车体运行过程中的路面坡度信息和路面崎岖度信息以及车体不同运行状态下的各项传感器数据;数据处理模块,对所述传感器数据进行预处理,并提取特征数据,得到处理后的传感器数据;深度学习模块,用于通过深度学习方法建立车体所受牵引力、路面坡度、路面崎岖度与处理后的传感器数据之间的关系;数据获取模块,用于获取车体实际运行过程中的传感器数据,并基于车体所受牵引力、路面坡度、路面崎岖度与传感器数据之间的关系得到当前车体所受牵引力、路面坡度、路面崎岖度;参数调节模块,用于基于车体所受牵引力、路面坡度、路面崎岖度对车体的控制参数进行调节。8.一种计算机设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上
运行的计算机程序,其特征在于:所述处理器执行所述程序时实现如权利要求1~6中任一项所述的方法。9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于:所述程序被处理器执行时实现如权利要求1~6中任一项所述的方法。
技术总结
本发明公开了一种牵引式电动运载助力车控制方法,涉及负载运输设备技术领域,包括,在车体集成传感器、惯性测量单元以及深度摄像头;获取路面坡度信息和路面崎岖度信息以及各项传感器数据;对所述传感器数据进行预处理,得到处理后的传感器数据;通过深度学习方法建立车体所受牵引力、路面坡度、路面崎岖度与传感器数据之间的关系;获取车体实际运行过程中的传感器数据,得到当前车体所受牵引力、路面坡度、路面崎岖度;基于车体所受牵引力、路面坡度、路面崎岖度对车体的控制参数进行调节。本发明过深度学习建立场景多要素之间的关系,并将之应用在传感器少、信息量少的实际应用工况中,补全车体控制所需的信息缺失,达到更好的控制效果。控制效果。控制效果。
技术研发人员:吴超
受保护的技术使用者:南京山行智能科技有限公司
技术研发日:2022.09.02
技术公布日:2022/12/5
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。