技术特征:
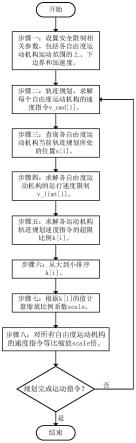
1.一种stewart平台多维度运动边界速度保护策略,其特征在于,包括如下步骤:s1、设置stewart平台上各运动件加速度限制与运动范围限制,规划出各运动件在给定运动指令速度时,以加速度限制降速至0所需距离,获得指令速度-所需距离的曲线函数;s2、将运动件当前实际位置与运动范围最大值之间的距离代入s1中曲线函数得出每一运动件对应的速度限制值;s3、计算各运动件指令速度与对应其速度限制值的比值并比较出当中最大值比值,以最大值比值的倒数绝对值对所有运动件指令速度进行同比缩放,以对应最大值比值运动件缩放后的指令速度与速度限制值相等停止缩放。2.根据权利要求1所述的一种stewart平台多维度运动边界速度保护策略,其特征在于:所述运动件包括支撑平台与6个相互独立的直线驱动臂。3.根据权利要求2所述的一种stewart平台多维度运动边界速度保护策略,其特征在于:所述s1中运动范围限制包括各个驱动臂运动范围、支撑平台位置运动范围与支撑平台姿态运动范围。4.根据权利要求1所述的一种stewart平台多维度运动边界速度保护策略,其特征在于:所述s1中曲线函数包括t型加速度曲线、方波型加速度曲线与谐波加速度曲线。5.根据权利要求4所述的一种stewart平台多维度运动边界速度保护策略,其特征在于:所述方波型加速度曲线对应的速度限制值v
limit
[i]计算公式如下:当指令速度v
cmd[i]
≥0时,当指令速度v
cmd[i]
<0时,其中,[i]为运动件编号;a
limit[i]
为编号为i的运动件加速度限制;s
max[i]
、s
min[i]
分别为编号为i的运动件运动范围限制的上、下限边界值;s
[i]
为编号为i的运动件所处实际位置。6.根据权利要求1所述的一种stewart平台多维度运动边界速度保护策略,其特征在于:当所述运动件以远离运动范围限制方向运动时,其运动速度不受限制。7.根据权利要求1-6任一所述的一种stewart平台多维度运动边界速度保护策略,其特征在于:基于所述stewart平台的运动边界保护策略还适用于串联机器人。
技术总结
本发明提出了一种stewart平台多维度运动边界速度保护策略,解决了常规平台是整机以较高的速度达到运动范围最大值,触发限位保护,易造成急停、损坏等问题,其主要技术方案包括如下步骤:S1、设置stewart平台上各运动件加速度限制与运动范围限制,规划出各运动件在给定运动指令速度时,以加速度限制降速至0所需距离,获得指令速度-所需距离的曲线函数;S2、将运动件当前实际位置与运动范围最大值之间的距离代入S1中曲线函数得出每一运动件对应的速度限制值;S3、计算各运动件指令速度与对应其速度限制值的比值并比较出当中最大值比值,以最大值比值的倒数绝对值对所有运动件指令速度进行同比缩放,以对应最大值比值运动件缩放后的指令速度与速度限制值相等停止缩放。放后的指令速度与速度限制值相等停止缩放。放后的指令速度与速度限制值相等停止缩放。
技术研发人员:许宁
受保护的技术使用者:南京市海智航信息科技有限公司
技术研发日:2022.07.20
技术公布日:2022/12/5
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。