技术特征:
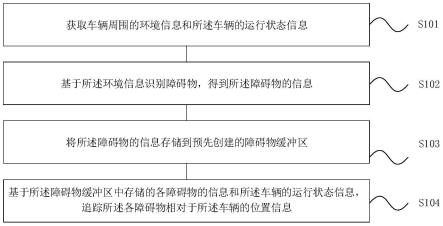
1.一种障碍物追踪方法,其特征在于,所述方法包括:获取车辆周围的环境信息和所述车辆的运行状态信息;基于所述环境信息识别障碍物,得到所述障碍物的信息;将所述障碍物的信息存储到预先创建的障碍物缓冲区;基于所述障碍物缓冲区中存储的各障碍物的信息和所述车辆的运行状态信息,追踪所述各障碍物相对于所述车辆的位置信息。2.根据权利要求1所述的方法,其特征在于,所述方法还包括:将所述各障碍物相对于所述车辆的位置信息显示在显示界面中。3.根据权利要求1所述的方法,其特征在于,所述将所述障碍物的信息存储到预先创建的障碍物缓冲区之前,所述方法还包括:基于所述障碍物的信息和所示障碍物缓冲区中存储的各障碍物的信息,判断所述障碍物是否为重复识别的障碍物;若不是重复识别的障碍物,则将所述障碍物的信息存储到预先创建的障碍物缓冲区。4.根据权利要求3所述的方法,其特征在于,所述基于所述障碍物的信息和所述障碍物缓冲区中存储的各障碍物的信息,判断所述障碍物是否为重复识别的障碍物包括:基于所述障碍物在世界坐标系中的第一位置信息和所述障碍物缓冲区中存储的各障碍物在世界坐标系中的第二位置信息,确定所述第一位置信息与各第二位置信息之间的相对距离;若确定的各相对距离均大于或等于相对距离阈值,则判定所述障碍物不是重复识别的障碍物。5.根据权利要求1所述的方法,其特征在于,所述方法还包括:对所述障碍物缓冲区中的任一障碍物,基于该障碍物的信息,判断该障碍物是否满足删除条件,若满足删除条件,则将该障碍物的信息从所述障碍物缓冲区中删除。6.根据权利要求5所述的方法,其特征在于,所述基于该障碍物的信息,判断该障碍物是否满足删除条件包括:基于该障碍物在车辆坐标系中的位置信息,判断该障碍物与所述车辆之间的距离是否大于或等于预设距离阈值且该障碍物位于所述车辆之后;若该障碍物与所述车辆之间的距离大于或等于预设距离阈值且该障碍物位于所述车辆之后,则判定满足删除条件。7.根据权利要求1所述的方法,其特征在于,基于所述障碍物缓冲区中存储的各障碍物的信息和所述车辆的运行状态信息,追踪所述各障碍物相对于所述车辆的位置信息包括:对所述障碍物缓冲区中的任一障碍物,基于该障碍物在车辆坐标系中的位置信息、确定该位置信息时所述车辆在世界坐标系中的第一位置以及所述车辆当前在世界坐标系中的第二位置,确定该障碍物相对于所述车辆的位置信息。8.一种障碍物追踪装置,其特征在于,所述装置包括:获取模块,用于获取车辆周围的环境信息和所述车辆的运行状态信息;识别模块,用于基于所述环境信息识别障碍物,得到所述障碍物的信息;存储模块,用于将所述障碍物的信息存储到预先创建的障碍物缓冲区;追踪模块,用于基于所述障碍物缓冲区中存储的各障碍物的信息和所述车辆的运行状
态信息,追踪所述各障碍物相对于所述车辆的位置信息。9.一种电子设备,其特征在于,包括:存储器;处理器;以及计算机程序;其中,所述计算机程序存储在所述存储器中,并被配置为由所述处理器执行以实现如权利要求1-7中任一项所述的方法。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-7中任一项所述的方法。
技术总结
本公开涉及一种障碍物追踪方法、装置、设备及计算机可读存储介质,该方法包括:获取车辆周围的环境信息和所述车辆的运行状态信息;基于所述环境信息识别障碍物,得到所述障碍物的信息;将所述障碍物的信息存储到预先创建的障碍物缓冲区;基于所述障碍物缓冲区中存储的各障碍物的信息和所述车辆的运行状态信息,追踪所述各障碍物相对于所述车辆的位置信息。本公开通过将障碍物信息存储在障碍物缓冲区中,即使障碍物处于传感器的感知盲区时,也可以根据障碍物缓冲区中的障碍物信息结合车辆的运行状态信息,对各障碍物的位置信息的实时追踪,解决了由于传感器感知范围的限制造成无法识别到感知盲区中障碍物的问题,有效保证障碍物追踪的准确性。物追踪的准确性。物追踪的准确性。
技术研发人员:孟轲
受保护的技术使用者:北京罗克维尔斯科技有限公司
技术研发日:2022.03.16
技术公布日:2022/12/5
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。