1.本技术总体涉及控制系统,并且更具体地涉及跨本地网络分布的脉冲宽度调制控制系统的同步。
背景技术:
2.在许多应用中,诸如工业驱动系统,重要的是各种物理分布式控制设备同步运行以控制相应设备同步操作。例如,机器人系统、机械工具和位置受控驱动系统可以并入由多个相应控制器中的不同控制器独立控制的多个马达或致动器。同步的控制器允许马达和致动器一起操作,以实现在精确时间到精确位置的协调移动。
3.在一些示例中,同步的控制器分布在机器、载具、建筑物或其他可测量到几十米或更小的体积中,并通过通信网络连接。控制器可以经由通信网络交换控制信号和传感器测量值。时钟漂移、时钟源的变化(这可能导致在分开的控制器中累积时钟差异)、时钟生成错误和时钟信号传播差(例如,软件或硬件诱导的延迟或传输时间差)可能使以其他方式依赖相同的时钟时序来保持同步的分布式控制器不同步。
4.图1示出了现有技术脉冲宽度调制(pwm)受控系统100的示例功能块布局。初级pwm控制器102由初级全局时钟104(其也可以是全局时钟)钟控并且被连接以控制第一pwm受控设备106(其也可以称为功率级)。初级pwm控制器102使用初级全局时钟104保持初级pwm计数,并使用初级pwm计数生成pwm控制信号以控制第一pwm受控设备106。特别是在占空比(时间比例)pwm实施方式中,pwm信号在高与低之间的状态响应于改变pwm计数而改变,例如当计数达到第一值时将pwm信号设置为低并且当计数达到第二值时将pwm信号设置为高。(可替代地,当计数达到第一值时将pwm信号设置为高,并且当计数达到第二值时将pwm信号设置为低。)调整第一值会改变pwm占空比,其是pwm信号循环中的pwm信号为高(或低)的部分。调整第二值对应于改变计数器最大值或模值,其确定pwm信号循环的周期。初级pwm控制器102也可以通过n条通信线路108连接到隔离块110。隔离块110的使用可以取决于例如设备106是高电压还是低电压。隔离块110包括电容、电感或光阻抗,以将初级pwm控制器102与其他电功率机制(regime)(诸如应用于不同pwm控制器的不同电功率机制)隔离。隔离块110通过n条通信线路112连接到由次级全局时钟116钟控的次级pwm控制器114。次级pwm控制器114被连接以控制第二pwm受控设备118。次级pwm控制器114使用次级全局时钟116保持次级pwm计数,并使用次级pwm计数生成pwm控制信号来控制第二pwm受控设备118。
技术实现要素:
5.在所描述的示例中,脉冲宽度调制(pwm)系统包括启动器(initiator)和接收器。启动器包括启动器计数器和启动器pwm信号发生器。启动器计数器响应于启动器时钟信号推进(advance)启动器计数。启动器pwm信号发生器响应启动器计数生成启动器pwm信号。接收器包括接收器计数器、接收器pwm信号发生器和被配置为重置接收器计数的电路系统。接收器计数器响应于接收器时钟信号推进接收器计数。接收器pwm信号发生器响应于接收器
计数生成接收器pwm信号。该电路系统响应于同步信号并基于偏移来重置接收器计数。
附图说明
6.图1示出了现有技术的同步的脉冲宽度调制(pwm)受控系统的示例功能块布局。
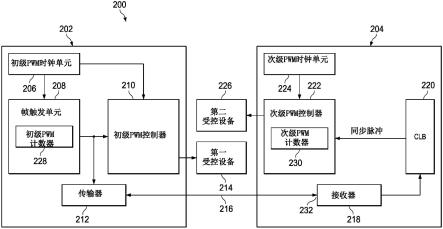
7.图2示出了同步的pwm受控系统的示例功能块布局。
8.图3示出了同步的pwm受控系统的启动器部分的示例功能块布局。
9.图4示出了示例同步帧按位布局。
10.图5示出了用于pwm受控系统的同步过程的示例。
具体实施方式
11.图2示出了同步的pwm受控系统200的示例功能块布局。pwm受控系统200包括初级模块202(也称为启动器模块)和次级模块204(也称为接收器模块)。初级模块202包括初级pwm时钟单元206,该初级pwm时钟单元生成初级pwm时钟信号并且被连接以对帧触发单元208和初级pwm控制器210进行钟控。例如,初级pwm时钟信号可以从初级全局时钟系统(未示出)生成。帧触发单元208被连接以将同步脉冲(下文进一步描述)输出到初级pwm控制器210和传输器(transmitter)212。初级pwm控制器210被连接以控制第一受控设备214。传输器212输出到通信线路216。通信线路216可以是例如双向互连件,诸如快速串行接口(fsi)。通信线路216可以是双向的,以允许数据也通过通信线路216传输。因此,通信线路216可以在数据帧传输和同步帧传输(或其他帧类型的传输)之间共享,并且接收器218在该处连接到通信线路216的输入可以称为共享输入232。
12.次级模块204具有接收器218,该接收器218被连接以从通信线路216接收帧(诸如数据帧或同步帧)。接收器218被连接以将接收到的帧输出到可配置逻辑块220(clb 220),诸如现场可编程门阵列(fpga)或专用数字逻辑。clb 220被连接以输出到次级pwm控制器222。次级pwm时钟224被连接以钟控次级pwm控制器222。次级pwm时钟224例如可以从次级全局时钟系统(未示出)生成。次级pwm控制器222被连接以控制第二受控设备226。
13.初级pwm控制器210包括初级pwm计数器228,该初级pwm计数器228响应于初级pwm时钟单元206产生的初级时钟信号而生成初级pwm计数。初级pwm控制器210使用初级pwm计数来生成控制信号以控制第一受控设备214。例如,初级pwm时钟单元206可以以100mhz操作,而初级pwm计数以20khz的速率递增(诸如每五千个上升时钟沿增加一次)。因此,初级模块202和次级模块204中的计算和其他处理功能分别相对于初级pwm控制器210和次级pwm控制器222的设备控制功能以更高的速率操作,以改善设备控制的精度。
14.因此,操作第一受控设备214的控制信号可以描述为pwm控制信号。帧触发单元208检测预定的同步条件(在该条件下将发生pwm计数同步),并且当检测到同步条件时生成同步脉冲。帧触发单元208响应于以下条件而生成同步脉冲:初级pwm计数或其他初级定时器逻辑或备用pwm定时器单元,达到预定的硬件编码值,该值可以存储在帧触发单元208的可编程存储器(例如,非易失性存储器、熔断器等)中或硬编码到帧触发单元208的静态逻辑中。使用预定的硬件编码值提供了不依赖于软件层执行中常见的时序变化的确定性重置时序,诸如停顿和存储器获取。因此,可以周期性地生成每个同步脉冲。帧触发单元208将同步脉冲输出到初级pwm控制器210和传输器212。响应于同步脉冲,初级pwm控制器210将初级
pwm计数重置为零。响应于同步脉冲,传输器生成同步帧(也称为ping帧),并经由通信线路216将同步帧传输到次级模块204的接收器218。
15.次级模块204的接收器218将接收到的帧(诸如数据帧和同步帧)输出到clb 220。clb 220检测接收到的帧是否为同步帧,诸如通过确定帧是否包括具有对应于同步帧的值的帧标签(位串)。(关于图4进一步描述同步帧的示例结构。)如果clb 220检测到同步帧,则clb 220将同步脉冲发送到次级pwm控制器222。
16.次级pwm控制器222包括次级pwm计数器230,该次级pwm计数器响应于次级pwm时钟224而生成次级pwm计数。次级pwm控制器222响应于次级pwm计数生成控制信号以控制第二受控设备226。因此,操作第二受控设备226的控制信号可以描述为pwm控制信号。如果次级pwm控制器222接收到同步脉冲,则次级pwm控制器222将次级pwm计数重置为零加上偏移(也称为相位值)。
17.偏移被编码在次级pwm控制器222本地的硬件中,并且同步过程由硬件层而不是软件层执行。偏移是存储器变量并且可以被编码在例如非易失性存储器或熔断器逻辑中。避免与软件相关的停顿、存储器获取和其他与过程相关的延迟提供了确定性同步时序,增强了同步准确性。偏移是响应于初级模块202和次级模块204之间的物理距离而确定的。该偏移可以包括不同地对应于同步脉冲和同步帧的串行位流从帧触发单元208行进到传输器212,通过通信线路216到接收器218,到clb 220,到次级pwm控制器222所用的时间。例如,这种传播延迟可以是几十纳秒,其可以被添加到偏移中。使用硬件层执行同步限制了传输时间以外的变量的影响,并允许在(进一步)响应于基于电路的延迟中准确地确定偏移(以补偿基于电路的延迟)。基于电路的延迟(或时延)可以包括,例如,启动帧传送所用的时间、同步帧的持续时间、clb 220检测同步帧所用的时间、执行次级pwm计数重置所用的时间,以及其他与同步过程相关的延迟。
18.在一些实施例中,使用硬件层以使用同步帧和与传输距离相关的偏移来执行同步提供了准确到初级pwm时钟信号的单个循环内的初级/次级同步。在初级pwm时钟单元206以100mhz操作的实施例中,这可以对应于准确到10ns以内的初级/次级同步。因此,在由初级pwm计数器228生成的初级pwm计数和由次级pwm计数器230生成的次级pwm计数控制的设备以比相应初级pwm时钟单元206或次级pwm时钟单元224低得多的频率操作(例如,20khz对照100mhz)的一些实施例中,初级/次级同步可以关于相对较低频率的设备控制机制和相对较高频率的初级和次级块202、20 4操作机制两者都高度准确。
19.根据前述,clb 220生成的同步脉冲重置由次级pwm控制器222的次级pwm计数器230生成的次级pwm计数。该重置连同添加的偏移有效地将次级pwm计数设置为与次级pwm计数重置时的初级pwm计数(由初级pwm控制器210的初级pwm计数器228生成)相同的计数或几乎相同的计数。当初级pwm计数被重置并且同步帧被发送到次级模块204的接收器218时,等到次级pwm计数被重置为偏移量时,初级pwm计数也将推进等于(或近似等于)该偏移的量。因此,同步帧和所得次级重置将初级和次级pwm计数同步到与传输时间和其他过程可变性(诸如由于温度引起的变化)相关的容差内。通过将初级模块202和次级模块204之间的物理距离限制为几十米,可以限制传输时间的可变性,使得同步将次级pwm计数更准确地重置为与在次级pwm计数重置时的初级pwm计数相同的值。
20.如本文所描述的,pwm控制系统可以使用指定的同步帧来跨多个设备同步pwm控制
模块以提供协调的实时控制。该同步可以通过在诸如fsi的双向互连件(诸如通信线路216)上传输同步帧来执行。同步帧可以适合在相对有限的带宽内,并且因此,可以使用共享的通信线路传输,同时避免与正在通信的其他数据发生冲突。
21.使用仅硬件层来启动同步帧的通信传送,并接收和检测同步帧,可以避免一些或全部与软件相关的过程中断,提供可靠的定时同步。通过使用硬件层而不使用软件协议层来执行同步,可以确定性地执行同步过程。在执行时使用硬件层而不使用软件协议层还允许同步过程避免对中央处理单元(cpu)或其他软件控制的子系统的依赖。因此,使用pwm网络(诸如pwm受控系统200)的初级模块202内的硬件层以使用帧触发单元208检测初级模块202内部的事件,响应于检测到内部事件来生成同步帧,并且同步初级pwm模块210的定时器,有助于在网络的pwm模块210、222中提供可预测定时同步事件。此外,使用pwm网络的次级模块204内的硬件层来接收、检测和响应于同步帧有助于提供网络的pwm模块的可预测定时同步。
22.pwm网络的次级模块204可以使用硬件来检测接收到的同步帧。次级模块204响应于检测到同步帧的接收而生成同步脉冲。在次级模块204内的次级pwm控制器222接收到同步脉冲之后,次级pwm控制器222的定时器通过利用针对帧时延进行校正的偏移来重置次级pwm控制器222的次级pwm计数而与检测到的同步帧同步。因此,初级和次级pwm控制模块202、204之间的已知(例如,测量的)距离(在一些示例中,具有其他延迟,诸如附加的信号传播延迟以及初级和次级模块202、204和对应的初级和次级pwm模块210、222内部的电路相关延迟)可以用于生成偏移以补偿例如由这样的距离导致的传输延迟。
23.初级pwm计数可以通过在同步脉冲被传输之后(或,例如在同步脉冲生成之后,或在帧触发单元208初始检测到事件之后——诸如预定的初级pwm计数值——触发同步)而将其重置为零来同步。次级pwm计数可以通过响应于同步帧(或检测到该帧之后的脉冲)而将其重置为零加上生成的偏移来同步。所生成的偏移可以表示例如同步帧的传输(transmission)和同步帧的接收之间的时延,以及(一个和多个)对应的同步脉冲的其他传播延迟。所生成的偏移还可以包括次级模块204和对应的次级pwm控制器222的电路延迟,以及初级pwm计数的重置和同步帧的传输之间的电路延迟。
24.图3示出了同步的pwm受控系统300的启动器部分的示例功能块布局。初级模块传输器302的第一输入被连接以接收第一检测事件块304的输出。第一检测事件块304的输入被连接以接收第一多路复用器306的输出。第一多路复用器306具有连接到m个硬件层触发线路308的数量m个输入。初级模块传输器302的第二输入被连接以接收第二检测事件块310的输出。第二检测事件块310的输入被连接到第二多路复用器312的输出。第二多路复用器312具有连接到p个软件层触发线路314的数量p个输入。第一和第二检测事件块304、310以及第一和第二多路复用器306、312可以对应于图2的帧触发单元208。
25.m个硬件层触发线路308可以用于连接到m个不同的内部(例如片上)或外部硬件层触发源(或两者),以使初级模块传输器302生成同步帧。第一检测事件块304确定第一多路复用器306的输出是否对应于触发事件或触发事件的组合,以用于由初级模块传输器302生成同步帧。如果是,则第一检测事件块304向初级模块传输器302发送同步脉冲以使初级模块传输器302生成同步帧。
26.p个软件层触发线路314可以用于连接到p个不同的内部或外部软件层触发源(或
两者),以用于初级模块传输器302生成除同步帧之外的帧。第二检测事件块310确定第二多路复用器312的输出是否对应于触发事件或触发事件的组合,以用于由初级模块传输器302生成软件触发的非同步帧。如果是,则第二检测事件块312向初级模块传输器302发送信号以使初级模块传输器302生成软件启动的帧。
27.图4示出了示例同步帧按位布局400。在同步帧402之前,通信线路216可以处于(并且接收器218接收)空闲状态404。帧的存在由同步帧402的前导码406指示。在图4的示例中,前导码402包括识别帧402的多个时钟沿,尽管可以使用任何其他合适的前导码。前导码406之后依次是帧开始408、帧类型410、帧标签412、帧结尾414和一个或多个后帧时钟沿416。帧开始408指示帧的数据部分的开始。帧类型410从可能的帧类型的枚举列表中指示帧的类型。帧结尾414指示已经到达帧的结尾。(图4中为这些帧段示出的特定值仅仅是说明性的。)在将帧与通信线路216上的其他信号分离的后帧时钟沿416之后,通信线路216返回到空闲状态404(或通信线路216承载的后续内容)。
28.帧标签412用于将帧识别为同步帧402。帧标签412可以是例如四个位,其特定值对应于同步帧402。clb 220(图2)检查帧标签412是否具有对应于同步帧402的值以检测同步帧402或非同步帧的存在。clb 220检测接收器418对特定帧标签412的接收有助于通过自动地检测帧标签412且具有减少的确定性时延来避免软件干预。
29.图5示出了用于pwm受控系统的同步过程500的示例。在步骤502中,启动器pwm模块(例如,初级pwm控制器210,图2)生成启动器pwm计数。在步骤504中,包括启动器pwm模块的启动器模块响应于启动器pwm计数而控制第一受控设备。在步骤506中,启动器模块响应于硬件编码的触发(诸如启动器pwm计数的值)而生成同步脉冲。在步骤508中,响应于同步脉冲生成同步帧,并将同步帧从启动器模块传输到接收器模块(例如,次级模块204,图2)。在步骤510中,响应于同步脉冲而重置启动器pwm计数。在步骤512中,接收器pwm模块生成接收器pwm计数。在步骤514中,包括接收器pwm模块的接收器模块响应于接收器pwm计数来控制第二受控设备。在步骤516中,接收器模块接收并检测同步帧。在步骤518中,响应于同步帧的检测,利用偏移重置接收器pwm计数。
30.在权利要求的范围内,对所描述的实施例进行修改是可能的,并且其他实施例也是可能的。
31.在一些实施例中,对应于单个同步事件(例如,由单个同步触发器触发的)的(一个或多个)同步脉冲和(一个或多个)同步帧可以统称为同步信号。例如,帧触发单元生成的同步脉冲、从初级模块向次级模块传输的同步帧,以及响应于检测到同步帧而由clb生成的同步脉冲可以统称为同步信号。
32.在一些实施例中,初级pwm计数以1khz至1mhz或更高的速率递增。
33.在一些实施例中,偏移或要添加到偏移的值作为同步帧的一部分被传输。例如,对应于与初级模块的内部功能相关的延迟(过程和传播相关的延迟)的值可以作为同步帧的一部分被传输。
34.在一些实施例中,通信线路传播延迟可以从对应线缆的数据表中确定,例如每米线缆的纳秒数。
35.在一些实施例中,同步的pwm计数用于执行模数转换器(adc)和捕获模块的同步的控制,以及同步控制算法的执行。捕获模块是数字外设,其接受数字脉冲并测量进入脉冲信
号的脉冲宽度。
36.在一些实施例中,初级模块包括控制受控设备和初级模块的传输器两者的单个pwm控制器。
37.在一些实施例中,图2的初级模块和次级模块可以使用德克萨斯仪器股份有限公司(texas instruments incorporated)的f28004x(potenza)微控制器和包含快速串行接口的其他德克萨斯仪器股份有限公司c2000 mcu来实施。
38.在一些实施例中,响应于同步脉冲将初级pwm计数重置为除零以外的初始(或默认)值,并且响应于同步脉冲将次级pwm计数重置为(非零)初始(或默认)值加上偏移。在一些实施例中,除零以外的初始值可以是对应于同步脉冲的生成与初级pwm计数重置之间的延迟的偏移。
39.在一些实施例中,pwm计数递增一。在一些实施例中,pwm计数以除一以外的数递增。在一些实施例中,pwm计数递减。递增计数和递减计数在本文中都被称为“推进”计数。除响应于同步帧以外而执行的计数在本文中被称为“名义上”推进计数。
40.在一些实施例中,初级pwm计数不响应于同步帧而重置。在一些实施例中,初级pwm计数被包括在同步帧中,并且次级pwm计数响应于被包括在同步帧中的初级pwm计数和偏移而重置。在一些实施例中,同步帧包括默认值,初级pwm计数被重置为默认值,并且次级pwm计数被重置为默认值加上偏移。在一些实施例中,将初级pwm计数重置为基于当前初级pwm计数的值(诸如将初级pwm计数四舍五入到选定的二进制数字),并且将次级pwm计数重置为基于当前次级pwm计数的值(诸如将次级pwm计数四舍五入到选定的二进制数字)加上偏移。
41.fsi和可配置逻辑块外设在本文中用于对应的示例。在一些实施例中,如本文所描述的同步帧和偏移是使用其他接口和硬件来实施的。
42.在一些实施例中,传输器212经由通信线路216(或其他通信线路216)连接到附加次级模块204的接收器218,例如,以星形或菊花链拓扑。
43.在一些实施例中,其他帧部分用于指示同步帧。在一些实施例中,帧具有不同的按位布局。
44.在一些实施例中,pwm控制信号根据相应pwm控制信号的逻辑值启用和禁用受控设备。
45.在一些实施例中,初级模块和次级模块之间的距离可以是几十米或更小。在一些实施例中,初级模块和次级模块之间的距离可以更长。
46.在一些实施例中,如本文所描述的初级pwm计数和次级pwm计数同步适用于各种控制机制,例如分布式马达轴控制,以及分布式功率级(诸如太阳能逆变器/转换器、ac/dc模块和dc/dc模块)的控制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。