1.本实用新型属大科学装置领域,特别涉及一种导轨系统。
背景技术:
2.实验物理及工业控制系统(experimental physics and industrial control system,epics)是用于构建分布式控制系统的体系结构,提供软件开发运行环境,是先进的控制系统集成工具。国际上有超过10家实验室、大学、研究机构的项目使用epics系统,因此epics系统的工作效率极为重要。随着大科学装置的发展,导轨控制系统已成为大科学装置应用中不可或缺的部分。导轨控制系统是安装在导轨上,用于控制导轨精密移动的设备系统,在实验系统中或是工业系统中,可用于参数测量或是设备的距离控制。
3.其中,导轨控制系统在应用时需要集成在epics分布式控制系统中。而由于导轨控制系统的通讯效率低,且在控制设备较多时,导轨控制系统还容易出现错误,因此导轨控制系统低且不稳定的通讯效率,也影响了epics系统的工作效率。
技术实现要素:
4.本实用新型的目的在于提供一种导轨系统,具备较高的通讯效率,有利于提升实验物理及工业控制系统的工作效率。
5.为解决上述技术问题,本实用新型是通过以下技术方案实现的:
6.本实用新型提供的一种导轨系统,包括:
7.单片机;
8.控制器,电性连接于所述单片机;
9.本地操作模块,电性连接于所述单片机;
10.网络通讯单元,电性连接于所述单片机和所述控制器,且所述网络通讯单元通讯连接于至少一实验系统;
11.电机驱动器,电性连接于所述单片机;
12.光栅尺读数器,电性连接于所述控制器;以及
13.位移台,电性连接于所述电机驱动器的驱动端和所述光栅尺读数器。
14.在本实用新型一实施例中,所述单片机和所述控制器之间通过串行外设接口电性连接。
15.在本实用新型一实施例中,包括数据处理模块,所述数据处理模块的输入端电性连接于所述单片机和所述光栅尺读数器,所述数据处理模块的输出端电性连接于所述控制器和所述电机驱动器。
16.在本实用新型一实施例中,所述数据处理模块和所述单片机通过串行外设接口电性连接。
17.在本实用新型一实施例中,所述光栅尺读数器和所述位移台通过插头电性连接。
18.在本实用新型一实施例中,所述位移台和所述电机驱动器通过插头电性连接。
19.在本实用新型一实施例中,所述单片机和所述网络通讯单元通过串行外设接口电性连接。
20.在本实用新型一实施例中,所述控制器和所述网络通讯单元通过公用网络接口电性连接。
21.在本实用新型一实施例中,所述网络通讯单元和所述实验系统通过公用网络接口电性连接。
22.在本实用新型一实施例中,所述实验系统为实验物理及工业控制系统。
23.如上所述,本实用新型提供了一种导轨系统,可以与epics系统通讯,并且具备较高的通讯效率,有利于提升epics系统的工作效率。且本实用新型的导轨控制系统,具备多种通讯连接结构,能够适应多种通讯需求,通讯出错的可能性低。且本实用新型的导轨控制系统,支持直接导入二次开发数据包,从而避免在导轨控制系统内进行封装的过程,使epics系统能够直接调用导轨控制系统的数据,通讯效率和准确率都较高。
24.当然,实施本实用新型的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
25.在此了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
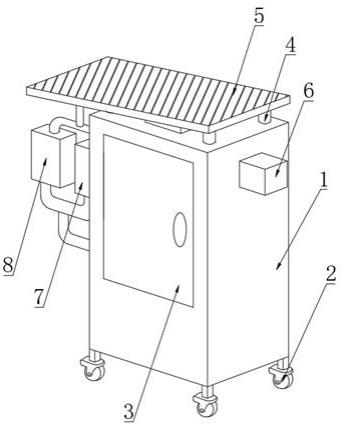
26.图1为本实用新型所述导轨控制系统的内部结构示意图。
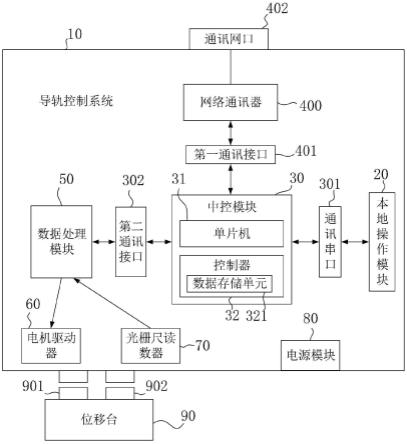
27.图2为本实用新型一实施例中导轨控制系统的内部结构示意图。
28.标号说明:10、导轨控制系统;20、本地操作模块;21、远程通讯单元;30、中控模块;31、单片机;32、控制器;321、数据存储单元;301、通讯串口;302、第二通讯接口;40、网络通讯单元;400、网络通讯器;401、第一通讯接口;402、通讯网口;50、数据处理模块;60、电机驱动器;70、光栅尺读数器;80、电源模块;90、位移台;901、驱动接头;902、信号接头。
具体实施方式
29.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
30.大科学装置是指通过较大规模投入和工程建设来完成,建成后通过长期的稳定运行和持续的科学技术活动,是一种实现重要科学技术目标的大型设施。随着大科学装置的发展,在实验室、大学和研究机构的项目中使用的实验物理及工业控制系统,多用于进行加速器控制、高度物理实验数据获取、射电天文望远和工业过程控制。本实用新型提供的导轨控制系统应用于大科学装置中,具体的,应用于epics分布式控制系统中,可降低epics分布式控制系统的二次开发工程量,并减少出错,适用于多种控制设备的使用环境。
31.请参阅图1所示,本实用新型提供了一种导轨系统10,导轨控制系统10通讯连接有实验系统1和位移台90。在导轨控制系统10的控制下,能够根据实验系统1的操作需求对位
移台90进行高精度控制。其中,导轨控制系统10包括本地操作模块20、中控模块30、网络通讯单元40、数据处理模块50、电机驱动器60和光栅尺读数器70。其中,本地操作模块20电性连接于中控模块30,以将外部的操作信息传递给中控模块30,从而掌控中控模块30的工作进程,而中控模块30也可以将控制过程中的日志数据反馈给本地操作模块20,从而提升本地操作的及时性和可靠度。中控模块30电性连接于网络通讯单元40,网络通讯单元40电性连接于实验系统1。中控模块30将封装后的控制信息传递给实验系统1,以便于实验系统1进行参数和实验步骤的把控。中控模块30电性连接于数据处理模块50,数据处理模块50电性连接于电机驱动器60。数据处理模块50接收中控模块30传递的控制数据信息,并将所述数据控制信息转换为可被电机驱动器60识别和执行的驱动信息。电机驱动器60的输出端连接于位移台90,位移台90根据所述驱动信息,完成位移移动。
32.请参阅图1所示,在本实用新型一实施例中,位移台90电性连接于光栅尺读数器70,且光栅尺读数器70电性连接于数据处理模块50。光栅尺读数器70根据位移台90的移动距离,获取位移台90的移动信息,再将所述移动信息传递给数据处理模块50。由数据处理模块50将所述移动信息处理后得到处理完成的半封装信息,再将处理完成的半封装信息传递给中控模块30。中控模块30获得所述半封装信息后,将所述半封装信息封装为可供上位机直接读取的通讯信息。中控模块30电性连接于网络通讯单元40,网络通讯单元40电性连接于实验系统1,中控模块30将所述通讯信息通过网络通讯单元40传递实验系统1。
33.请参阅图1和图2所示,在本实用新型一实施例中,实验系统1为实验物理及工业控制系统(experimental physics and industrial control system,epics)。具体的,实验系统1包括加速器控制系统、高能物理实验数据获取系统和射电天文望远镜的接收系统,以及工业过程控制系统。
34.请参阅图1和图2所示,在本实用新型一实施例中,本地操作模块20的操作端可以是触控的显示屏。本地操作模块20包括远程通讯单元21,远程通讯单元21远程通讯连接于外部操作设备,以使导轨控制系统10具备本地操作和远程操作两种服务模式。其中,远程通讯单元21例如为无线通信设备、可编程逻辑控制器(programmable logic controller,plc)网络通讯单元。
35.请参阅图1和图2所示,在本实用新型一实施例中,中控模块30包括单片机31和控制器32。控制器32电性连接于单片机31。其中,单片机31例如为stm32f103ret6芯片。控制器32例如为现场可编程门阵列(field-programmable gate array,fpga)芯片。且控制器32可以运行嵌入式linux操作系统。具体的,控制器32例如为stm32f407芯片。其中,单片机31的引脚包括例如16个pa引脚、例如16个pb引脚和例如16个pc引脚。单片机31和控制器32通过串行外设接口(serial peripheral interface,spi)通信连接,且单片机31和控制器32的连接方式可以是spi1通讯连接,也可以是spi2通讯连接。其中,单片机31和控制器32安装在在同一电路板上,形成中控模块30。中控模块30和本地操作模块20之间通过通讯串口301连接。中控模块30能通过通讯串口接收到本地操作模块20的指令,并将指令发送给数据处理模块50,实现对位移台90的控制。其中,控制器32包括数据存储单元321,数据存储单元321电性连接于网络通讯单元40和本地操作模块10,可以将实验物理及工业控制系统的二次开发数据包在外部封装完成后,再导入数据存储单元321中,由数据存储单元321将二次开发数据包通过网络通讯单元40传递给实验系统1。
36.请参阅图2所示,在本实用新型一实施例中,单片机31包括多个第一引脚和多个第二引脚。控制器32包括多个第三引脚和多个第四引脚。单片机31和控制器32之间设置有第一引脚连接结构和第二引脚连接结构。其中,在所述第一引脚连接结构中,第一引脚连接于第三引脚,实现单片机31和控制器32之间的spi1通讯。在所述第二引脚连接结构中,第二引脚连接于第四引脚,实现单片机31和控制器32之间的spi2通讯。
37.请参阅图2所示,在本实用新型一实施例中,第一引脚包括单片机31的pc4引脚、pa5引脚、pa6引脚、pa7引脚、pc2引脚和pc1引脚。第三引脚包括控制器32的118引脚、124引脚、120引脚、119引脚、135引脚和140引脚。具体的,第一引脚连接结构如下,单片机31的pc4引脚与控制器32的118引脚连接,单片机31的pa5引脚与控制器32的124引脚连接,单片机31的pa6引脚与控制器32的120引脚连接,单片机31的pa7引脚与控制器32的119引脚连接,单片机31的pc2引脚与控制器32的135引脚连接,单片机31的pc1引脚与控制器32的140引脚连接。通过第一引脚连接结构,使单片机31和控制器32以spi1通讯连接,以使单片机31能够将对电机驱动器60的控制指令发送给控制器32。
38.请参阅图2所示,在本实用新型一实施例中,第二引脚包括单片机31的pb12引脚至pb15引脚。第四引脚包括控制器32的110引脚、106引脚、105引脚和102引脚。具体的,第二引脚连接结构如下,单片机31的pb12引脚与控制器32的110引脚连接,单片机31的pb13引脚与控制器32的106引脚连接,单片机31的pb14引脚与控制器32的105引脚连接,单片机31的pb15引脚与控制器32的102引脚连接。通过第二引脚连接结构,使单片机31和控制器32形成spi2通讯连接,通过spi2通讯连接,使控制器32能够将位移台90的运动状态和位置信息发送给单片机31,且spi2通讯连接为中断方式,以便实时更新位移台90的位置及状态信息。
39.请参阅图2所示,在本实用新型一实施例中,网络通讯单元40包括网络通讯器400、第一通讯接口401和通讯网口402,其中,网络通讯器400和单片机31电性连接。具体的,单片机31和网络通讯器400之间连接有第三引脚连接结构。网络通讯器400包括多个通讯引脚,在第三引脚连接结构中,第一引脚连接于通讯引脚。在本实施例中,网络通讯器400例如为w5500芯片。网络通讯器400包括pa5~pa7引脚、p32~p37引脚和c1~c4引脚。其中,pa5~pa7引脚用于进行spi数据通讯。c1为硬件复位引脚,c2为中断引脚,c3为片选引脚。
40.请参阅图2所示,在本实用新型一实施例中,通讯引脚包括网络通讯器400的p32引脚至p37引脚。其中,第三引脚结构的接线如下,网络通讯器400的p32引脚与单片机31的pc4引脚连接,网络通讯器400的p33引脚与单片机31的pa5引脚连接,网络通讯器400的p34引脚与单片机31的pa6引脚连接,网络通讯器400的p35引脚与单片机31的pa7引脚连接,网络通讯器400的p36引脚与单片机31的pc2引脚连接,网络通讯器400的p37引脚与单片机31的pc1引脚连接。外部设备将数据传输给网络通讯器400,再由网络通讯器400传递给单片机31。其中,第一通讯接口401设置在网络通讯器400上,且网络通讯器400和控制器32通过第一通讯接口401连接。在本实施例中,第一通讯接口401为标准8位模块化的公用网络接口(registered jack 45,rj45)。网络通讯器400连接于通讯网口402,通讯网口402连接于实验系统1。其中,通讯网口402为rj45网口。
41.请参阅图1和图2所示,在本实用新型一实施例中,中控模块30上设置有第二通讯接口302,第二通讯接口302为spi通讯接口。数据处理模块50通过第二通讯接口302与中控模块30电性连接,数据处理模块50能够将位移台90的位置信息实时发送至中控模块30,并
接收中控模块30的运动控制指令。数据处理模块50电性连接于光栅尺读数器70。光栅尺读数器70能够测算位移台90的位移量,从而实时更新位移台90的位置信息。位移台90的位移信息被传递至中控模块30中进行处理,从而形成运动控制指令。运动控制指令经过数据处理模块50传递至电机驱动器60,由电机驱动器60对位移台90进行位移控制,从而实现对位移台90的高精度闭环控制。其中,数据处理模块50例如为fpgamax10芯片,且fpgamax10芯片的系统时钟例如为50mhz。光栅尺读取模块70例如为am26ls32acr芯片,以稳定获取光栅尺的信号。电机驱动器60连接于位移台90和数据处理模块50,电机驱动器60例如为tlp2168芯片,tlp2168芯片可用于驱动位移台90运动,具体的,tlp2168芯片可控制驱动位移台90的步进电机。
42.请参阅图1和图2所示,在本实用新型一实施例中,导轨控制系统10包括电源模块80,电源模块80电性连接于本地操作模块20、中控模块30、网络通讯单元40、数据处理模块50、电机驱动器60和光栅尺读数器70,从而为导轨控制系统10供电。在本实施例中,电源模块80包括wra2405s芯片,以实现例如24v转5v的电压转换功能。电源模块80包括ams1117-3.3芯片,以实现例如5v转3.3v的电压转换功能。
43.请参阅图1和图2所示,在本实用新型一实施例中,位移台90上设置有驱动接头901和信号接头902。位移台90和导轨控制系统10通过驱动接头901和信号接头902电性连接。具体的,位移台90和电机驱动器60通过驱动接头901连接,位移台90和光栅尺读数器70通过信号接头902电性连接。其中,驱动接头901和信号接头902为db9插头。
44.本实用新型提供了一种导轨系统,所述导轨控制系统包括本地操作模块、中控模块、网络通讯单元、数据处理模块、电机驱动器和光栅尺读数器,以及电源模块。根据本实用新型提供的导轨控制系统,可以实现对位移台的高精度闭环控制,且数据传输效率高。
45.在本说明书的描述中,参考术语“本实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
46.以上公开的本实用新型实施例只是用于帮助阐述本实用新型。实施例并没有详尽叙述所有的细节,也不限制该实用新型仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本实用新型的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本实用新型。本实用新型仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。