1.本实用新型属于铁路运输装卸技术领域,具体地说是一种铁路车钩钩舌自动打开装置。
背景技术:
2.现行的铁路货运机车编组,当到达目的地后需在相应站台对机车进行解编和重新编组。解编与重新编组就是对某组铁路车钩钩舌进行打开与闭合作业的过程。但由于铁路车钩未能及时进行维修保养或野蛮作业等造成车钩钩舌变形及锈蚀,此时车钩钩舌便不能顺利打开。现在的做法是现场人员直接进入两节车厢之间的铁轨内人工将机车车钩钩舌打开,以便连挂时能够顺利进行。此种做法存在作业环境差、作业人员存在人身安全等问题。
3.与此同时,在很多采用铁路装卸运输的其它地方如:钢厂、电厂、矿场(煤矿,铁矿等)也存在铁路机车的解挂与连挂等作业。在解挂与连挂过程中同样需要对某组铁路车钩钩舌进行打开与闭合作业。对于车钩我国采用的是统一的行业标准,因此在以上场合也同样会遇到由于铁路车钩未能及时进行维修保养或野蛮作业等造成车钩钩舌变形及锈蚀,车钩钩舌不能顺利打开的情况。同样需要现场人员直接进入两节车厢之间的铁轨内人工将机车车钩钩舌打开,以便连挂时能够顺利进行。此种做法也存在效率低下、作业环境差、作业人员存在人身安全等问题。
4.现阶段,行业内直接针对机车车钩钩舌开合的自动化设备尚属行业空白。虽然有采用间接操作提钩杆打开钩舌的方式,但无法解决因车钩钩舌变形或锈蚀而造成钩舌无法打开的情况。因此,行业内急需能够替代人工进入铁轨内手动打开机车车钩钩舌的装置,以提高作业效率、改善作业环境、消除作业人员存在的人身安全问题。
技术实现要素:
5.针对上述问题,本实用新型的目的在于提供一种铁路车钩钩舌自动打开装置。
6.本实用新型的目的是通过以下技术方案来实现的:
7.一种铁路车钩钩舌自动打开装置,包括伸缩机构、平移机构及电磁铁吸附组件,所述伸缩机构的输出端上装设有所述平移机构、并带动所述平移机构沿所述伸缩机构的伸缩方向移动,所述电磁铁吸附组件装设于所述平移机构上,所述平移机构带动所述电磁铁吸附组件沿垂直于所述伸缩机构伸缩方向移动,且所述电磁铁吸附组件随平移机构在伸缩机构的带动下沿伸缩机构的伸缩方向移动。
8.所述电磁铁吸附组件包括电永磁铁安装外壳及安装于所述电永磁铁安装外壳中的电永磁铁,所述电永磁铁上具有用于吸附车钩钩舌的吸附面,所述吸附面为与车钩钩舌外轮廓形状相契合的包络弧面。
9.所述伸缩机构包括伸缩机构外部连接座、一层伸缩臂、二层伸缩臂、三层伸缩臂、四层伸缩臂及伸缩驱动电机,所述伸缩机构外部连接座及所述伸缩驱动电机分别安装于所述一层伸缩臂外侧,所述一层伸缩臂、二层伸缩臂、三层伸缩臂及四层伸缩臂由外至内依次
套接,所述伸缩驱动电机通过传动组件a驱动所述二层伸缩臂沿所述伸缩机构长度方向伸缩,所述二层伸缩臂上设有用于带动所述三层伸缩臂沿所述伸缩机构长度方向伸缩的传动组件b,所述三层伸缩臂上设有用于带动所述四层伸缩臂沿所述伸缩机构长度方向伸缩的传动组件 c,所述四层伸缩臂的前端作为所述伸缩机构的输出端与所述平移机构连接。
10.所述传动组件a包括主驱动同步带轮、从动同步带轮a及从动同步带轮b,所述主驱动同步带轮安装于所述伸缩驱动电机的输出端,所述从动同步带轮b安装于所述一层伸缩臂的内壁上,所述从动同步带轮a转动设置于所述一层伸缩臂上,所述从动同步带轮a通过主驱动同步带与所述主驱动同步带轮连接、同时通过二层伸缩驱动同步带与所述从动同步带轮b连接,所述二层伸缩驱动同步带上安装有与所述二层伸缩臂连接的连接耳座。
11.所述传动组件b包括三层伸出动滑轮、三层伸出驱动钢缆、三层缩回动滑轮及三层缩回驱动钢缆,所述三层伸出动滑轮安装于所述二层伸缩臂的内壁前部位置上,所述三层伸出驱动钢缆的一端与所述一层伸缩臂的内壁后部连接、另一端绕过所述三层伸出动滑轮后与所述三层伸缩臂连接,所述三层缩回动滑轮安装于所述二层伸缩臂的内壁后部位置上,所述三层缩回驱动钢缆的一端与所述一层伸缩臂的内壁前部连接、另一端绕过所述三层缩回动滑轮后与所述三层伸缩臂连接。
12.所述传动组件c包括四层伸出动滑轮、四层伸出驱动钢缆、四层缩回动滑轮及四层缩回驱动钢缆,所述四层伸出动滑轮安装于所述三层伸缩臂的内壁前部位置上,所述四层伸出驱动钢缆的一端与所述二层伸缩臂的内壁后部连接、另一端绕过所述四层伸出动滑轮后与所述四层伸缩臂连接,所述四层缩回动滑轮安装于所述三层伸缩臂的内壁后部位置上,所述四层缩回驱动钢缆的一端与所述二层伸缩臂的内壁前部连接、另一端绕过所述四层缩回动滑轮后与所述四层伸缩臂连接。
13.所述二层伸缩臂的外壁后部上设有二层后端支撑块;所述三层伸缩臂的外壁后部上设有三层后端支撑块;所述四层伸缩臂的外壁后部上设有四层后端支撑块;所述一层伸缩臂的前部内侧开设有用于装设二层前端支撑块的容纳槽a,所述容纳槽a螺纹连接有调节螺钉a,所述调节螺钉a顶住所述二层前端支撑块、并使所述二层前端支撑块抵在所述二层伸缩臂的外壁上;所述二层伸缩臂的前部内侧开设有用于装设三层前端支撑块的容纳槽b,所述容纳槽b螺纹连接有调节螺钉b,所述调节螺钉b顶住所述三层前端支撑块、并使所述三层前端支撑块抵在所述三层伸缩臂的外壁上;所述三层伸缩臂的前部内侧开设有用于装设四层前端支撑块的容纳槽c,所述容纳槽c上螺纹连接有调节螺钉c,所述调节螺钉c顶住所述四层前端支撑块、并使所述四层前端支撑块抵在所述四层伸缩臂的外壁上。
14.所述平移机构包括固定连接支架、浮动平移支架、平移驱动电机、传动丝杠、丝杠平移限位直线导轨及平移架,所述固定连接支架安装于所述伸缩机构的输出端上,所述浮动平移支架通过浮动平移组件与所述固定连接支架连接,所述平移驱动电机、传动丝杠及所述丝杠平移限位直线导轨分别安装于所述浮动平移支架上,所述平移架上分别设有与所述传动丝杠螺纹连接的丝杠螺母及与所述丝杠平移限位直线导轨滑动连接的滑块a,所述电磁铁吸附组件安装于所述平移架上,所述平移驱动电机的驱动端通过平移驱动同步带与所述传动丝杠连接。
15.所述浮动平移组件包括浮动限位直线导轨与两组对称设置的限位块a、限位块b及浮动弹簧,所述浮动限位直线导轨安装于所述固定连接支架上,所述浮动平移支架上设有
与所述浮动限位直线导轨滑动连接的滑块b,各所述限位块a分别设置于所述固定连接支架上,各所述限位块b分别设置于所述浮动平移支架上,各所述限位块a分别通过同组的浮动弹簧与同组的限位块b连接,各所述浮动弹簧的轴向中心线均共线且均平行于所述传动丝杠的轴向中心线。
16.所述电磁铁吸附组件通过所述电磁铁吸附组件转动轴与所述平移架转动连接,所述电磁铁吸附组件转动轴上套设有平面扭转弹簧,所述平面扭转弹簧一端与所述平移架抵接、另一端与所述电磁铁吸附组件抵接。
17.本实用新型的优点与积极效果为:
18.1.本实用新型通过四级的伸缩机构的设置,获得大的伸缩位移量,更能节省设备占用空间。
19.2.本实用新型通过伺服驱动控制,保证伸出缩回位移精确可控,同时为两轴插补控制提供技术保障。
20.3.本实用新型的伸缩机构的动力传动采用同步带加柔性钢缆结构作为传动,保证了动力传递的稳定性,相比链传动或齿轮传动传动结构更简单,调整更简单。
21.4.本实用新型采用电永磁铁吸附车钩钩舌外轮廓,电磁吸附拉钩力大,可有效可靠打开车钩勾舌,能够有效解决因车钩钩舌变形或锈蚀而造成钩舌无法打开的情况;并通过伸缩与平移机构的两轴伺服插补控制,实现车钩钩舌以钩舌转轴为轴旋转开钩,保证了车钩钩舌开合过程受力方向总是与旋转方向垂直,进而实现开合过程的性能稳定性。
22.5.本实用新型的平移机构整体采用伺服丝杠驱动加对称弹簧的柔性控制形式,最大限度兼容不同火车车厢及不同型号钩舌的型号误差,提高了设备的兼容性,减少了设备的整体硬件投入节省了制造成本。
23.6.本实用新型的技术方案可消除现有提钩杆间接作用来打开钩舌相关机构本身的结构缺点,降低现有设备的故障率,提高现场编组及连挂作业的整体效率。
24.7.本实用新型的技术方案可消除通过人工排除故障而带来的安全隐患,减少了企业的人力成本支出和企业管理成本。
附图说明
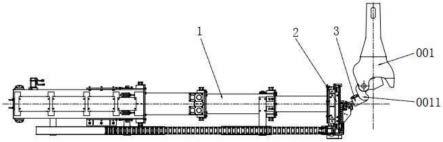
25.图1为本实用新型的整体的俯视结构示意图;
26.图2为本实用新型的整体的主视结构示意图;
27.图3为本实用新型的伸缩机构的俯视结构示意图;
28.图4为本实用新型的伸缩机构的主视结构示意图;
29.图5为图3的k-k剖面结构示意图;
30.图6为图4的c-c剖面结构示意图;
31.图7为图5的n-n剖面结构示意图;
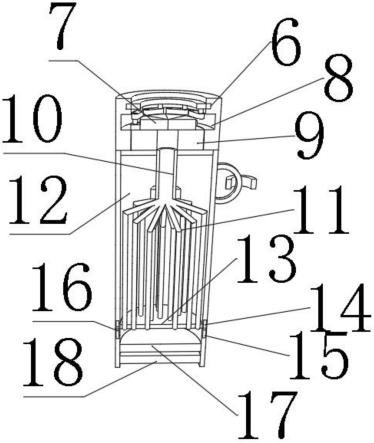
32.图8为本实用新型的平移机构的主视结构示意图之一;
33.图9为本实用新型的平移机构的主视结构示意图之二;
34.图10为本实用新型的平移机构的侧视结构示意图;
35.图11为本实用新型的平移机构的俯视结构示意图;
36.图12为图11的b-b剖面结构示意图。
37.图中:1为伸缩机构、101为一层伸缩臂、102为二层伸缩臂、 103为三层伸缩臂、104为四层伸缩臂、105为伸缩机构外部连接座、 106为伸缩驱动电机、107为四层前端支撑块、108为三层前端支撑块、109为二层前端支撑块、110为四层后端支撑块、111为三层后端支撑块、112为二层后端支撑块、113为主驱动同步带轮、114为主驱动同步带、115为从动同步带轮a、116为二层伸缩驱动同步带、 117为三层伸出驱动钢缆、118为三层缩回动滑轮、119为四层缩回动滑轮、120为三层缩回驱动钢缆、121为三层伸出动滑轮、122为四层伸出驱动钢缆、123为四层伸出动滑轮、124为四层缩回驱动钢缆;
38.2为平移机构、201为浮动平移支架、202为平移驱动电机、203 为平移驱动同步带、204为传动丝杠、205为平移架、206为平面扭转弹簧、207为电磁铁吸附组件转动轴、208为限位块a、209为浮动弹簧、210为限位块b、211为固定连接支架、212为浮动限位直线导轨、213为丝杠平移限位直线导轨;
39.3为电磁铁吸附组件;
40.001为车钩本体、0011为车钩钩舌。
具体实施方式
41.下面结合附图1-12对本实用新型作进一步详述。
42.一种铁路车钩钩舌自动打开装置,如图1和图2所示,本实施例中包括伸缩机构1、平移机构2及电磁铁吸附组件3,伸缩机构1的输出端上装设有平移机构2、并带动平移机构2沿伸缩机构1的伸缩方向移动,电磁铁吸附组件3装设于平移机构2上,平移机构2带动电磁铁吸附组件3沿垂直于伸缩机构1伸缩方向移动,且电磁铁吸附组件3随平移机构2在伸缩机构1的带动下沿伸缩机构1的伸缩方向移动。平移机构2的运动方向与伸缩机构1的运动方向垂直,采用双轴插补伺服控制方式最终实现机车车钩本体001的车钩钩舌0011以车钩钩舌0011的转轴为轴做圆周运动;双轴插补伺服控制方式采用现有技术的控制方式。
43.具体而言,本实施例中电磁铁吸附组件3包括电永磁铁安装外壳及安装于电永磁铁安装外壳中的电永磁铁,电永磁铁上具有用于吸附车钩钩舌0011的吸附面,吸附面为与车钩钩舌0011外轮廓形状相契合的包络弧面。电永磁铁与电永磁铁安装外壳的安装结构采用现有技术,电永磁铁由外接控制器控制是否通电。可根据车钩钩舌0011不同型号更换具有相对应形状的包络弧面的电永磁铁。
44.具体而言,如图3-7所示,本实施例中伸缩机构1包括伸缩机构外部连接座105、一层伸缩臂101、二层伸缩臂102、三层伸缩臂103、四层伸缩臂104及伸缩驱动电机106,伸缩机构外部连接座105及伸缩驱动电机106分别安装于一层伸缩臂101外侧,伸缩机构外部连接座105可与外接机架固定、与地面保持相对静止,一层伸缩臂101、二层伸缩臂102、三层伸缩臂103及四层伸缩臂104由外至内依次套接,伸缩驱动电机106通过传动组件a驱动二层伸缩臂102沿伸缩机构1长度方向伸缩,二层伸缩臂102上设有用于带动三层伸缩臂103 沿伸缩机构1长度方向伸缩的传动组件b,三层伸缩臂103上设有用于带动四层伸缩臂104沿伸缩机构1长度方向伸缩的传动组件c,四层伸缩臂104的前端作为伸缩机构1的输出端与平移机构2连接。本实施例中伸缩驱动电机106为市购的伺服电机,由外接控制器控制动作。
45.传动组件a包括主驱动同步带轮113、从动同步带轮a 115及从动同步带轮b,主驱动同步带轮113安装于伸缩驱动电机106的输出端,从动同步带轮b安装于一层伸缩臂101的
内壁上,从动同步带轮 a 115转动设置于一层伸缩臂101上,从动同步带轮a 115为同轴固定在一起的双层带轮,从动同步带轮a 115通过主驱动同步带114与主驱动同步带轮113连接、同时通过二层伸缩驱动同步带116与从动同步带轮b连接,二层伸缩驱动同步带116上安装有与二层伸缩臂 102连接的连接耳座。控制伸缩驱动电机106的输出端转动,进而依次带动主驱动同步带轮113、主驱动同步带114、从动同步带轮a 115、二层伸缩驱动同步带116及从动同步带轮b转动;使二层伸缩驱动同步带116往复转动,进而实现与二层伸缩驱动同步带116通过连接耳座连接的二层伸缩臂102的伸缩动作。
46.传动组件b包括三层伸出动滑轮121、三层伸出驱动钢缆117、三层缩回动滑轮118及三层缩回驱动钢缆120,三层伸出动滑轮121 安装于二层伸缩臂102的内壁前部位置上,三层伸出驱动钢缆117的一端与一层伸缩臂101的内壁后部连接、另一端绕过三层伸出动滑轮 121后与三层伸缩臂103连接,三层缩回动滑轮118安装于二层伸缩臂102的内壁后部位置上,三层缩回驱动钢缆120的一端与一层伸缩臂101的内壁前部连接、另一端绕过三层缩回动滑轮118后与三层伸缩臂103连接。当二层伸缩臂102伸出时三层伸缩臂103在三层伸出驱动钢缆117的带动下实现伸出,且三层伸缩臂103的伸出速度是二层伸缩臂102的一倍;三层伸缩臂103在三层缩回驱动钢缆120的带动下实现缩回,且三层伸缩臂103的缩回速度是二层伸缩臂102的一倍。
47.传动组件c包括四层伸出动滑轮123、四层伸出驱动钢缆122、四层缩回动滑轮119及四层缩回驱动钢缆124,四层伸出动滑轮123 安装于三层伸缩臂103的内壁前部位置上,四层伸出驱动钢缆122的一端与二层伸缩臂102的内壁后部连接、另一端绕过四层伸出动滑轮 123后与四层伸缩臂104连接,四层缩回动滑轮119安装于三层伸缩臂103的内壁后部位置上,四层缩回驱动钢缆124的一端与二层伸缩臂102的内壁前部连接、另一端绕过四层缩回动滑轮119后与四层伸缩臂104连接。当三层伸缩臂103伸出时四层伸缩臂104在四层伸出驱动钢缆122的带动下实现伸出,且四层伸缩臂104的伸出速度是三层伸缩臂103的一倍;四层伸缩臂104在四层缩回驱动钢缆124的带动下实现缩回,且四层伸缩臂104的缩回速度是三层伸缩臂103的一倍。
48.二层伸缩臂102的外壁后部上设有二层后端支撑块112,用于在一层伸缩臂101与二层伸缩臂102之间提到支撑作用。三层伸缩臂 103的外壁后部上设有三层后端支撑块111,用于在二层伸缩臂102 与三层伸缩臂103之间提到支撑作用。四层伸缩臂104的外壁后部上设有四层后端支撑块110,用于在三层伸缩臂103与四层伸缩臂104 之间提到支撑作用。一层伸缩臂101的前部内侧开设有用于装设二层前端支撑块109的容纳槽a,容纳槽a螺纹连接有调节螺钉a,调节螺钉a顶住二层前端支撑块109、并使二层前端支撑块109抵在二层伸缩臂102的外壁上,用于在一层伸缩臂101与二层伸缩臂102之间提到支撑作用。通过调节螺钉a可调节二层前端支撑块109与二层伸缩臂102之间的间隙大小。二层伸缩臂102的前部内侧开设有用于装设三层前端支撑块108的容纳槽b,容纳槽b螺纹连接有调节螺钉b,调节螺钉b顶住三层前端支撑块108、并使三层前端支撑块108抵在三层伸缩臂103的外壁上,用于在二层伸缩臂102与三层伸缩臂103 之间提到支撑作用。通过调节螺钉b可调节三层前端支撑块108与三层伸缩臂103之间的间隙大小。三层伸缩臂103的前部内侧开设有用于装设四层前端支撑块107的容纳槽c,容纳槽c上螺纹连接有调节螺钉c,调节螺钉c顶住四层前端支撑块107、并使四层前端支撑块 107抵在四层伸缩臂104的外壁上,用于在三层伸缩臂
103与四层伸缩臂104之间提到支撑作用。通过调节螺钉c可调节四层前端支撑块 107与四层伸缩臂104之间的间隙大小。本实施例中二层后端支撑块 112、三层后端支撑块111、四层后端支撑块110、二层前端支撑块 109、三层前端支撑块108及四层前端支撑块107均为尼龙块。
49.具体而言,如图8-12所示,本实施例中平移机构2包括固定连接支架211、浮动平移支架201、平移驱动电机202、传动丝杠204、丝杠平移限位直线导轨213及平移架205,固定连接支架211安装于四层伸缩臂104的前端上,浮动平移支架201通过浮动平移组件与固定连接支架211连接,平移驱动电机202、传动丝杠204及丝杠平移限位直线导轨213分别安装于浮动平移支架201上,传动丝杠204的轴向中心线与伸缩机构1的轴向中心线方向垂直,平移架205上分别设有与传动丝杠204螺纹连接的丝杠螺母及与丝杠平移限位直线导轨213滑动连接的滑块a,电磁铁吸附组件3安装于平移架205上,平移驱动电机202的驱动端通过平移驱动同步带203与传动丝杠204 连接。平移驱动电机202的驱动端带动传动丝杠204转动,进而带动装有电磁铁吸附组件3的平移架205沿垂直于伸缩机构1长度方向的方向移动。滑块a与丝杠平移限位直线导轨213的配合设置,使平移架205可稳定精准移动。平移驱动电机202为市购的伺服电机,由外接控制器控制动作。
50.浮动平移组件包括浮动限位直线导轨212与两组对称设置的限位块a 208、限位块b 210及浮动弹簧209,浮动限位直线导轨212 安装于固定连接支架211上,浮动平移支架201上设有与浮动限位直线导轨212滑动连接的滑块b,各限位块a 208分别设置于固定连接支架211上,各限位块b 210分别设置于浮动平移支架201上,各限位块a 208分别通过同组的浮动弹簧209与同组的限位块b 210连接,各浮动弹簧209的轴向中心线均共线且均平行于传动丝杠204的轴向中心线。滑块b与浮动限位直线导轨212的配合设置,使浮动平移支架201可稳定精准移动。通过两组对称设置的限位块a 208、限位块 b 210及浮动弹簧209的设置,正常情况下两侧浮动弹簧209受力平衡,浮动平移支架201位于中位,当双轴插补运动因外力或其它意外情况出现误差时浮动平移支架201可左右移动,防止造成其它零件的损坏。
51.电磁铁吸附组件3通过电磁铁吸附组件转动轴207与平移架205 转动连接,电磁铁吸附组件转动轴207上套设有平面扭转弹簧206,平面扭转弹簧206一端与平移架205抵接、另一端与电磁铁吸附组件 3抵接。当电磁铁吸附组件3发生转动角度后,平面扭转弹簧206为电磁铁吸附组件3提供恢复至原始位置的动力。电磁铁吸附组件3通过与平移机构2之间的直线加旋转运动,再通过配合垂直方向上伸缩机构1的伸缩运动最终可实现双轴插补伺服控制的钩舌圆周运动。
52.工作原理:
53.使用时,先使伸缩机构1及平移机构2的平移架205分别伸出到位;使电磁铁吸附组件3的电永磁铁通电,使电永磁铁的吸附面吸附住车钩钩舌0011;通过外接控制器通过双轴插补伺服控制方式控制伸缩机构1及平移架205动作,使车钩钩舌0011以车钩钩舌0011的转轴为轴做圆周运动,进而拉开车钩钩舌0011;拉开车钩钩舌0011 后,电磁铁吸附组件3的电永磁铁断电,伸缩机构1及平移机构2的平移架205分别回至初始位置。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。