油门装置
1.关联申请的相互参照
2.本技术基于2020年3月13日提交的日本专利申请2020-044241号,将其记载内容援用于此。
技术领域
3.本发明涉及一种油门装置。
背景技术:
4.以往,已知有具备致动器的油门踏板模块。例如,在专利文献1中,由螺线管驱动的致动器与旋转部件卡合,向返回方向施加力。
5.现有技术文献
6.专利文献
7.专利文献1:美国专利申请公开第102014118573号说明书
技术实现要素:
8.但是,在专利文献1的致动器中,不具有向返回方向施加力以外的功能。本发明的目的在于提供能够通过致动器实现多功能化的油门装置。
9.第1方式的油门装置具备至少一个驱动源、踏板杆以及动力传递机构。踏板杆根据踏入操作进行动作。动力传递机构能够通过驱动源的驱动而向踏板杆传递踏板杆的关闭方向以及打开方向的双方向的力。由此,能够通过致动器实现油门装置的多功能化。
10.第2方式以及第3方式的油门装置具备驱动源、踏板杆、动力传递机构、锁定机构以及控制部。踏板杆根据踏入操作进行动作。动力传递机构能够对踏板杆传递驱动源的驱动力。锁定机构为,通过驱动源将锁定部件驱动至锁定位置,并锁定踏板杆。
11.在第2方式中,控制部具有对驱动源的驱动进行控制的驱动控制部以及判定踏板杆的踏错的踏错判定部。在判定为踏板杆的踏错的情况下,驱动控制部使驱动源驱动,并锁定踏板杆。
12.在第3方式中,控制部具有对驱动源的驱动进行控制的驱动控制部以及判定换挡档位的档位判定部。在判定为换挡杆是倒挡的情况下,驱动控制部使驱动源驱动,并锁定踏板杆。
13.在第4方式~第6方式中,具备驱动源、踏板杆、动力传递机构以及控制部。踏板杆根据踏入操作进行动作。动力传递机构能够通过驱动源的驱动向踏板杆传递踏板杆的关闭方向的力。
14.在第4方式中,控制部具有对驱动源的驱动进行控制的驱动控制部以及判定踏板杆的踏错的踏错判定部。在判定为踏板杆的踏错的情况下,驱动控制部使驱动源驱动,向踏板杆的返回方向施加反作用力。
15.在第5方式以及第6方式中,控制部具有对驱动源的驱动进行控制的驱动控制部。
在第5方式中,驱动控制部对驱动源的驱动进行控制,以便施加驾驶员能够感知的至少一次脉冲状的反作用力。在第6方式中,在规定时间以上向踏板杆的返回方向施加一定的反作用力。
附图说明
16.通过参照附图进行下述详细描述,由此本发明的上述目的以及其他的目的、特征、优点将变得更加明确。这些附图为:
17.图1是表示第1实施方式的油门装置的侧视图;
18.图2是表示第1实施方式的油门装置的全开状态的侧视图;
19.图3是图1的iii-iii线截面图;
20.图4是图1的iv-iv线截面图;
21.图5是表示第1实施方式的动力传递机构的示意图;
22.图6是表示齿轮的变形例的示意图;
23.图7是说明在第1实施方式中不驱动马达的状态下的动力传递机构的工作的说明图;
24.图8是表示在第1实施方式中通过马达的驱动主动地将踏板杆向踏入方向驱动时的动力传递机构的工作的说明图;
25.图9是表示在第1实施方式中通过马达的驱动主动地将踏板杆向返回方向驱动时的动力传递机构的工作的说明图;
26.图10是说明第1实施方式的锁定机构的工作的说明图;
27.图11是说明第1实施方式的锁定解除的工作的说明图;
28.图12是表示第2实施方式的动力传递机构的示意图;
29.图13是表示在第2实施方式中通过马达的驱动主动地将踏板杆向踏入方向驱动时的动力传递机构的工作的说明图;
30.图14是表示在第2实施方式中通过马达的驱动主动地将踏板杆向返回方向驱动时的动力传递机构的工作的说明图;
31.图15是说明第2实施方式的锁定机构的工作的说明图;
32.图16是表示第3实施方式的油门装置的侧视图;
33.图17是表示第3实施方式的马达壳体的示意性的截面图;
34.图18是图17的xviii-xviii线截面图;
35.图19是图16的xix-xix线截面图;
36.图20是图19的xx-xx线截面图;
37.图21是表示第3实施方式的连杆侧凸轮、连接销以及拉动保持机构的平面图;
38.图22是表示第3实施方式的连杆侧凸轮以及连接销的侧视图;
39.图23是图21的xxiii-xxiii线截面图;
40.图24是图21的xxiv-xxiv线截面图;
41.图25是表示第3实施方式的连杆侧凸轮的平面图;
42.图26a是说明第3实施方式的连杆侧凸轮的孔部的说明图;
43.图26b是说明第3实施方式的连杆侧凸轮的孔部的说明图;
44.图27是说明第3实施方式的马达侧凸轮的说明图;
45.图28是简单地说明第3实施方式的连杆机构的说明图;
46.图29是表示在第3实施方式中通过马达的驱动主动地将踏板杆向踏入方向驱动时的动力传递机构的工作的说明图;
47.图30是表示在第3实施方式中通过马达的驱动主动地将踏板杆向返回方向驱动时的动力传递机构的工作的说明图;
48.图31是说明第3实施方式的锁定机构的说明图;
49.图32是说明第3实施方式的锁定解除的说明图;
50.图33是说明第3实施方式的锁定解除的说明图;
51.图34是表示第4实施方式的动力传递机构的截面图;
52.图35是图34的xxxv-xxxv线截面图;
53.图36是图34的xxxvi-xxxvi线截面图;
54.图37是图34的xxxvii-xxxvii线截面图;
55.图38a是表示第4实施方式的锁定状态的示意图;
56.图38b是表示第4实施方式的锁定解除状态的示意图;
57.图39是表示第5实施方式的油门装置的侧视图;
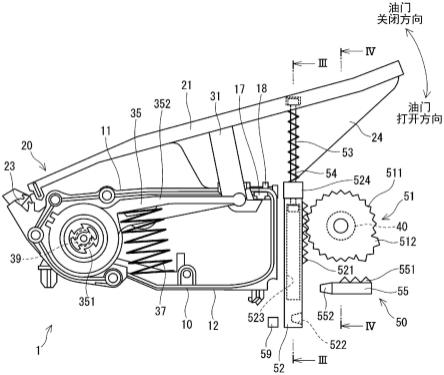
58.图40是第6实施方式的油门装置的立体图;
59.图41是第6实施方式的油门装置的侧视图;
60.图42是表示卸下了第6实施方式的衬垫的状态的油门装置的平面图;
61.图43是说明第6实施方式的油门装置中的减速齿轮的配置的平面图;
62.图44是图43的xliv-xliv线截面图;
63.图45是图43的xlv-xlv线截面图;
64.图46是表示在第6实施方式的油门装置中踏板杆为全开的状态的截面图;
65.图47是说明在第6实施方式中对踏板杆施加踏入方向的力的工作的截面图;
66.图48是说明在第6实施方式中对踏板杆施加踏入方向的力的工作的截面图;
67.图49是说明在第6实施方式中对踏板杆施加返回方向的力的工作的截面图;
68.图50是说明在第6实施方式中对踏板杆施加返回方向的力的工作的截面图;
69.图51是说明第6实施方式中的踏板杆的锁定状态的截面图;
70.图52是说明第6实施方式中的踏板杆的锁定状态的截面图;
71.图53是第7实施方式的油门装置的立体图;
72.图54是第7实施方式的油门装置的侧视图;
73.图55是图54的lv-lv线截面图;
74.图56是图54的lvi方向向视图;
75.图57是图56的lvii-lvii线截面图;
76.图58是图56的lviii-lviii线截面图;
77.图59是表示第7实施方式的第2正齿轮、第3正齿轮以及扭簧的立体图;
78.图60是表示第7实施方式的第2正齿轮、第3正齿轮以及扭簧的立体图;
79.图61是表示第7实施方式的锁定部件的分解立体图;
80.图62是表示第7实施方式的踏板杆为全闭的状态的侧视图;
81.图63是表示第7实施方式的踏板杆为全开的状态的侧视图;
82.图64是表示第7实施方式的踏板杆处于中间位置的状态的侧视图;
83.图65是图62的lxv-lxv线截面图;
84.图66是表示第7实施方式的锁定中途的状态的截面图;
85.图67是表示第7实施方式的踏板锁定状态的侧视图;
86.图68是图67的lxviii-lxviii线截面图;
87.图69是表示第8实施方式的第2正齿轮、第3正齿轮以及压缩螺旋弹簧的示意图;
88.图70a是说明第7实施方式的锁定机构的图、且是表示锁定前的状态的示意图;
89.图70b是说明第7实施方式的锁定机构的图、且是表示锁定状态的示意图;
90.图71a是说明第9实施方式的锁定机构的图、且是表示锁定前的状态的示意图;
91.图71b是说明第9实施方式的锁定机构的图、且是表示锁定中途的状态的示意图;
92.图71c是说明第9实施方式的锁定机构的图、且是表示锁定状态的示意图;
93.图72a是说明第10实施方式的锁定机构的图、且是表示锁定前的状态的示意图;
94.图72b是说明第10实施方式的锁定机构的图、且是表示锁定状态的示意图;
95.图72c是说明第10实施方式的锁定机构的图、且是说明锁定解除的示意图;
96.图73a是表示第11实施方式的锁定机构的图、且是表示锁定状态的示意图;
97.图73b是表示第11实施方式的锁定机构的图、且是说明锁定解除的示意图;
98.图74a是表示第12实施方式的锁定机构的图、且是表示锁定状态的示意图;
99.图74b是表示第12实施方式的锁定机构的图、且是说明锁定解除的示意图;
100.图75a是表示第13实施方式的锁定机构的图、且是表示锁定状态的示意图;
101.图75b是表示第13实施方式的锁定机构的图、且是说明锁定解除的示意图;
102.图76a是表示第14实施方式的锁定机构的图、且是表示锁定状态的示意图;
103.图76b是表示第14实施方式的锁定机构的图、且是说明锁定解除的示意图;
104.图77是表示第15实施方式的锁定机构的示意图;
105.图78是表示第16实施方式的油门装置的控制构成的说明图;
106.图79是表示第16实施方式的脉冲状的反作用力的时序图;
107.图80是表示第16实施方式的一定的反作用力的时序图;
108.图81a是说明踏板杆向返回方向的驱动的示意图;
109.图81b是说明踏板杆向踏入方向的驱动的示意图;
110.图82a是说明踏板杆向返回方向的驱动的示意图;
111.图82b是说明踏板杆向踏入方向的驱动的示意图;
112.图83a是说明将踏板杆以全闭进行锁定的锁定机构的示意图;
113.图83b是说明在踏板锁定时施加的力的说明图;
114.图84是说明将踏板杆以全闭进行锁定的锁定机构的示意图;
115.图85a是说明将踏板杆以全开进行锁定的锁定机构的示意图;
116.图85b是说明在踏板锁定时施加的力的说明图;
117.图86是说明将踏板杆以全开锁定的锁定机构的示意图。
具体实施方式
118.以下,基于附图对本发明的油门装置进行说明。以下,在多个实施方式中,对实质上相同的构成标注相同的符号并省略说明。
119.(第1实施方式)
120.图1~图11表示第1实施方式。油门装置1构成为能够安装于构成车辆的车身的一部分的未图示的地板。如图1以及图2所示,油门装置1具备壳体10、踏板杆20、作为驱动源的马达40(参照图4等)以及动力传递机构50等。
121.壳体10能够安装于车身,在内部收纳踏板35等内部可动机构。在图1等中示出将设置于壳体10的纸面近前侧的未图示的罩卸下的状态。对于后述的实施方式,适当地成为卸下了罩等的图。图1表示踏板杆20未被踏入的油门全闭状态,图2表示踏板杆20被踏入至极限的油门全开状态。
122.踏板杆20具有衬垫21、臂31以及踏板35,通过驾驶员的踏入操作等而被一体地驱动。衬垫21设置成能够由驾驶员踏入操作。衬垫21通过设置于壳体10的支点部件23而能够转动地支承于壳体10。本实施方式的踏板杆20是衬垫21在沿着壳体10的一面的方向上延伸设置的所谓“地板式”。将壳体10的与衬垫21对置的一侧的壁部设为顶壁部11,将与顶壁部11对置的壁部设为底壁部12。侧面防护件24是防护衬垫21与壳体10之间的间隙以免驾驶员的脚夹入衬垫21与壳体10之间的部件。
123.臂31将衬垫21与踏板35连结。在壳体10的顶壁部11形成有供臂31插通的开口。供臂31插通的开口形成为在踏板操作的整个范围内不与臂31干涉。
124.踏板35收纳在壳体10的内部空间,具有轴部351以及连结部352。轴部351能够旋转地支承于壳体10。连结部352以从轴部351大致沿着顶壁部11的方式延伸形成。连结部352的与轴部351相反侧的端部与臂31卡合。由此,通过驾驶员对衬垫21的操作,衬垫21、臂31以及踏板35成为一体而被驱动。
125.踏板施力部件37是压缩螺旋弹簧,一端固定于踏板35,另一端固定于底壁部12,将踏板35向关闭方向施力。在衬垫21未被驾驶员踏入时,臂31与形成在顶壁部11内侧的全闭止挡件17抵接。此外,当踏入衬垫21时,衬垫21与形成在顶壁部11外侧的全开止挡件18抵接。以下,将臂31与全闭止挡件17抵接的状态设为“油门全闭状态”,将衬垫21与全开止挡件18抵接的状态设为“油门全开状态”。
126.油门开度传感器39生成与轴部351的旋转角度相应的油门开度信号。油门开度传感器39例如具有包括霍尔元件的检测电路,该霍尔元件对埋入于轴部351的永久磁铁的朝向进行检测。油门开度传感器39只要能够检测油门开度即可,也可以使用霍尔元件以外的元件。油门开度信号经由未图示的连接器输出到发动机ecu等ecu90(参照图40)。
127.马达40(参照图4)例如是dc马达,设置在比臂31靠衬垫21的前端侧的位置。马达40的驱动力经由动力传递机构50传递到踏板杆20。由此,踏板杆20由马达40的驱动力驱动。本实施方式的油门装置1构成为,通过设置动力传递机构50,由此能够通过马达40的驱动力将踏板杆20向油门关闭方向(以下适当称作“返回方向”)以及油门打开方向(以下适当称作“踏入方向”)这两个方向主动地驱动。
128.此处,在详细说明动力传递机构50之前,概念性地说明致动器对踏板杆20的双向驱动。此处,将从驱动源经由动力传递机构向踏板杆20传递动力的一系列构成设为“致动
器”。如图81a所示,如果通过齿条部等直线运动部件以及压缩弹簧来构成动力传递机构50,则通过马达40的驱动而直线运动部件运动,由此能够将踏板杆20向油门关闭方向驱动。
129.此外,如图81b所示,如果通过直线运动部件以及拉伸弹簧来构成动力传递机构50,则通过马达40的驱动而直线运动部件运动,由此能够将踏板杆20向油门打开方向驱动。此外,如图82a以及图82b所示,也可以不经由弹簧,直线运动部件直接地驱动踏板杆20。由此,能够调整反作用力。另外,此处,以动力传递机构50通过马达40而直线运动的机构为例进行了说明,但也可以由转动的机构构成。
130.此外,如图83a以及图84所示,通过设置将踏板杆20在全闭状态下进行锁定的锁定部件55,由此例如在自动驾驶时将衬垫21固定,能够实现脚踏板化。此时,如图83a以及图83b所示,优选构成为,在踏板锁定时,通过斜面对驾驶员踏力进行分力,由此降低对马达40侧施加的负载。此处,如果能够维持对马达40侧施加的负载ld小于马达40在通电切断时的制动扭矩td的状态,则即使断开马达40的通电,也能够维持锁定状态。全开状态下的锁定也相同。此外,如图84所示,也可以构成为,在踏板锁定时,不对马达40侧施加驾驶员踏力。
131.进而,此外,如图85a、图85b以及图86所示,也可以通过锁定部件55将踏板杆20在全开状态下进行锁定。在该情况下,例如停止油门开度信号的输出等,在系统侧切断与油门开度相应的车辆控制。如图85a以及图85b所示,优选构成为,在踏板锁定时,通过斜面对踏板施力部件37的施加力进行分力,由此降低对马达40侧施加的负载。此外,如图86所示,也可以构成为,在踏板锁定时,不对马达40侧施加踏板施力部件37的施加力。
132.另外,图81a~图86是说明本说明书中的动力传递机构的概要的图,也包括说明后述的实施方式的概念的图,虽然并不是全部与本实施方式对应,但为了方便而附加与本实施方式对应的编号。
133.通过作为驱动源的马达40将踏板杆20主动地向返回方向驱动,由此例如当基于驾驶状况而踏入衬垫21时,在判断为燃料消耗率恶化的点施加反作用力,从而产生壁感,抑制驾驶员对衬垫21的踏入。由此,能够提高燃料消耗率。此外,通过向返回方向脉冲驱动踏板杆20,由此能够活用为从自动驾驶向手动驾驶的切换通知等的信息传递。
134.此外,通过将踏板杆20向踏入方向驱动,由此在从自动驾驶向手动驾驶转变时,例如能够从全闭锁定状态将踏板踏面位置调整至与车辆的运动对应的踏板位置。进而,此外,在自动驾驶时等,通过锁定踏板杆20,并使衬垫21脚踏板化,由此能够确保舒适性。在油门装置1中,可以说兼具“向返回方向的主动工作”、“向踏入方向的主动工作”以及“踏板锁定”这三个功能。此处,如果分别独立地设置用于实现这些功能的构造时,会导致体格大型化、复杂化。因此,在油门装置1中,通过一个马达40以及动力传递机构50实现上述三个功能。
135.返回图1~图5,对本实施方式的动力传递机构50的详细情况进行说明。在图1等中,为了避免变得复杂,省略与后述的弹簧支架部524内部的连接销53以及反作用力调整用施力部件54相关的虚线。动力传递机构50是正齿轮,具有直线运动部件52、连接销53、反作用力调整用施力部件54以及锁定部件55等。齿轮51具有第1齿轮部511以及第2齿轮部512,由马达40旋转驱动。第1齿轮部511构成为能够与直线运动部件52的驱动用齿条部521啮合。第2齿轮部512在周向的一部分,比第1齿轮部511向径向外侧突出地形成。第2齿轮部512构成为能够与锁定部件55的锁定用齿条部551啮合。
136.如图1等所示,可以通过一个正齿轮形成第1齿轮部511和第2齿轮部512,也可以如
图6所示,将第1齿轮部571与第2齿轮部572形成为不同部件,并通过使其组合来构成齿轮57。
137.直线运动部件52具有驱动用齿条部521、卡合孔部522、收纳室523以及弹簧支架部524,例如形成为筒状。驱动用齿条部521形成在与齿轮51对置的侧面,并形成为能够与齿轮51的第1齿轮部511啮合。卡合孔部522形成为,在锁定踏板杆20时能够与锁定部件55的卡合部552卡合。
138.在收纳室523中收纳有连接销53的一端侧。收纳室523形成为,在从踏板杆20的全闭到全开的整个范围内都不妨碍连接销53的驱动。弹簧支架部524设置在直线运动部件52的与衬垫21对置的一侧的端面,将反作用力调整用施力部件54的一端抵接固定。
139.连接销53的一端侧收纳于直线运动部件52的收纳室523,另一端通过间隙配合而固定于衬垫21。在直线运动部件52的衬垫21侧的端部形成有供连接销53插通的开口。反作用力调整用施力部件54是设置在连接销53的轴部的径向外侧的压缩螺旋弹簧,一端卡止于直线运动部件52的弹簧支架部524,另一端抵接固定于衬垫21。此外,设置有检测直线运动部件52的位置的位置传感器59。
140.锁定部件55具有锁定用齿条部551以及卡合部552。锁定用齿条部551形成为能够与齿轮51的第2齿轮部512啮合。卡合部552形成为前端侧缩径,在锁定踏板杆20时与直线运动部件52的卡合孔部522嵌合。在本实施方式中,锁定部件55以及卡合孔部522设置在比齿轮51靠踏入方向侧的位置。换言之,衬垫21的操作面按照齿轮51、锁定部件55的顺序排列。
141.基于图7~图9对油门装置1的工作进行说明。在本说明书中,为了简化说明,将旋转方向记载为相对于纸面的顺时针方向或者逆时针方向,但只要能够将部件向相应方向驱动即可,并不将旋转方向限定为顺时针方向或者逆时针方向。在图中,用点划线的箭头表示踏板杆20以及直线运动部件52的移动方向、齿轮51的旋转方向、直线运动部件52等部件的移动方向。在后述的实施方式中也相同。37
142.图7表示不驱动马达40的状态下的通常工作。在图7中,纸面左侧表示油门全闭状态,正中表示中间开度,纸面右侧表示油门全开状态。在油门全开状态下,齿轮51的第1齿轮部511与直线运动部件52的驱动用齿条部521啮合。当衬垫21被驾驶员踏入时,直线运动部件52由于反作用力调整用施力部件54的拉力而向驾驶员的踏入方向(即,纸面下方向)移动,由此齿轮51旋转,马达40成为连动旋转的状态。此外,即使直线运动部件52向纸面下方移动至油门全开状态,齿轮51与锁定部件55也是分离的。即,齿轮51、直线运动部件52以及锁定部件55构成为,在通常动作范围内,第1齿轮部511与直线运动部件52的驱动用齿条部521啮合,第2齿轮部512与锁定部件55的锁定用齿条部551啮合。由此,在通常动作范围内,锁定部件55不限制直线运动部件52的移动。
143.在图8中示出通过马达40的驱动而主动地将踏板杆20向踏入方向驱动的状态。在纸面左侧所示的油门全闭状态下,齿轮51的第1齿轮部511与直线运动部件52的驱动用齿条部521啮合。如纸面右侧所示,当向经由齿轮51将直线运动部件52朝踏入方向拉动的方向(图8中为纸面逆时针方向)驱动马达40时,通过连接销53将踏板杆20向踏入方向拉动。由此,通过马达40的驱动能够将踏板杆20向踏入方向驱动。在图8中,对从油门全闭状态起的驱动进行了说明,但在中间开度下也相同地进行,由此能够将踏板杆20向踏入方向驱动。
144.在图9中示出通过马达40的驱动主动地将踏板杆20向返回方向驱动的状态。在纸
面左侧所示的中间开度下,齿轮51的第1齿轮部511与直线运动部件52的驱动用齿条部521啮合。如纸面右侧所示,当向经由齿轮51将直线运动部件52朝返回方向推起的方向(图9中为纸面顺时针方向)驱动马达40时,反作用力调整用施力部件54被压缩,由此能够提高反作用力。即,在本实施方式中,经由反作用力调整用施力部件54间接地对踏板杆20施加反作用力,通过连接销53将踏板杆20直接向踏入方向拉动。此外,通过基于位置传感器59的检测值对马达40的驱动进行控制,由此能够适当地控制踏板杆20的位置、反作用力。包括后述的实施方式在内,除了图1以外省略位置传感器59的记载。
145.本实施方式的油门装置1具备锁定机构451,例如在自动驾驶时将踏板杆20锁定,由此能够实现脚踏板化。在图10中示出本实施方式的锁定工作。在图10的纸面左侧所示的通常工作中的油门全闭状态下,齿轮51的第1齿轮部511与直线运动部件52的驱动用齿条部521啮合,第2齿轮部512与锁定部件55的锁定用齿条部551分离。
146.如图10的纸面右侧所示,当向纸面顺时针方向驱动马达40时,直线运动部件52被向衬垫21侧推起,直线运动部件52与衬垫21抵接,由此衬垫21被固定。在直线运动部件52与衬垫21抵接的状态下,当进一步使马达40向相同方向旋转时,齿轮51的第2齿轮部512与锁定部件55的锁定用齿条部551啮合,通过马达40的旋转,锁定部件55被向朝向直线运动部件52的一侧驱动,卡合部552与卡合孔部522嵌合。由此,踏板杆20被锁定。
147.当将直线运动部件52的驱动用齿条部521与第1齿轮部511啮合的范围设为α1,将锁定部件55的锁定用齿条部551与第2齿轮部512啮合的范围设为β1时,设定为α1》β1。通过将锁定用齿条部551与第2齿轮部512的啮合范围限定为包括锁定位置的规定范围,能够实现省空间化。
148.卡合部552形成为前端侧缩径的锥形状。换言之,卡合部552具有相对于驾驶员踏力所施加的方向的斜面。此处,在踏板锁定状态下,当衬垫21被驾驶员踏入时,对卡合部552施加驾驶员踏力。通过将卡合部552形成为锥形状,利用斜面来承受驾驶员踏力,由此驾驶员踏力被分力,能够降低向马达40侧的负载ld(参照图83b)。将卡合部552的锥形角等的形状设计为,向马达40侧施加的负载ld小于马达40的通电切断时的制动扭矩td,由此即使断开向马达40的通电,也能够维持锁定状态。由此,与在锁定中始终进行通电的情况相比,能够减少消耗电力以及发热。
149.在图11中示出解除锁定时的工作。在本实施方式中,卡合部552以及弹簧支架部524由橡胶等弹性材料形成。在卡合部552与卡合孔部522嵌合的状态下,当向与锁定时相反的方向驱动马达40时,卡合部552弹性变形,由此卡合部552从卡合孔部522拔出。此外,通过弹簧支架部524弹性变形,由此直线运动部件52与衬垫21分离,由此能够解除锁定。
150.此外,当驾驶员对踏板杆20施加比较大的载荷,向马达40侧施加的负载ld超过马达40的通电切断时的制动扭矩td时,卡合部552从卡合孔部522拔出,锁定状态被解除。由此,即使在锁定状态下马达40变得无法驱动的情况下,也能够解除锁定,能够进行避让行驶。
151.如以上说明的那样,本实施方式的油门装置1具备至少一个马达40、踏板杆20以及动力传递机构50。踏板杆20根据踏入操作进行动作。详细来说,踏板杆20具有能够进行踏入操作的衬垫21、能够转动地支承于壳体10的踏板35、以及将衬垫21与踏板35连接的臂31。动力传递机构50通过马达40的驱动,能够将踏板杆20的关闭方向以及打开方向的双方向的力
传递至踏板杆20。尤其是在本实施方式中构成为,踏板杆20的可动范围是全闭到全开的范围内,在该范围内能够向返回方向以及踏入方向的双方向供给力。换言之,踏板杆20不会被驱动到超过全闭到全开的范围的位置。由此,能够通过马达40实现油门装置1的多功能化。
152.在本实施方式中,通过一个马达40主动地对踏板杆20施加双方向的力。此处,“主动地施加双方向的力”是指通过马达40的驱动而施加将踏板杆20推起或者下拉的力,例如,与通过使与踏板杆20抵接的部件分离,由此利用重力、外部的施加力而被动地施加力的情况是不同的概念。
153.详细来说,通过马达40对踏板杆20施加向油门关闭方向的力,由此能够对驾驶员施加反作用力,能够实现推回功能、基于反作用力的通知功能。由此,能够实现燃料消耗率改善、危险通知以及例如与自动驾驶相关的各种信息通知。
154.此外,通过马达40对踏板杆20施加向油门打开方向的力,由此在从自动驾驶向手动驾驶切换时,能够使踏板杆自动地移动到与车辆的加速度、电子节气门开度相应的油门开度。由此,能够提高驾驶切换时的舒适性。
155.油门装置1具备能够限制踏板杆20的动作的锁定机构451。此处,“能够限制踏板杆的动作”是包括在踏板杆20或者动力传递机构50中使踏板杆20的移动量成为零、或者与非锁定时相比使移动量变小的概念。
156.锁定机构451通过马达40将锁定部件55驱动至锁定位置,对踏板杆20进行锁定。在本实施方式中,直线运动部件52以及锁定部件55构成锁定机构451。此外,锁定部件55与直线运动部件52的卡合孔部522嵌合的位置对应于“锁定位置”。通过锁定踏板杆20,能够实现自动驾驶中的脚踏板化。此外,为了防止踏错,能够使踏板杆20无法踏入。
157.当对踏板杆20施加规定以上的力时,锁定机构451能够解除锁定。此处,“规定以上的力”是与驾驶员在通常的踏入动作中对踏板杆20施加的踏力相比为足够大的力。由此,即使在踏板锁定状态下马达40发生了故障的情况下,也能够通过以规定以上的力踏入踏板杆20来解除锁定,能够实现避让行驶。
158.动力传递机构50具有由马达40驱动的齿轮51以及具有与齿轮51啮合的驱动用齿条部521的直线运动部件52。此外,动力传递机构50具有连接销53以及反作用力调整用施力部件54。连接销53的一端固定于踏板杆20,另一端能够根据踏板杆20的驱动而移动地收纳在形成于直线运动部件52的收纳室523中。反作用力调整用施力部件54设置在直线运动部件52与踏板杆20之间。
159.通过马达40,经由连接销53对踏板杆20施加打开方向的力。此外,通过马达40,经由反作用力调整用施力部件54对踏板杆20施加关闭方向的力。由此,能够通过马达40主动地施加踏入方向以及返回方向的双方向的力。
160.锁定机构451具有与形成于直线运动部件52的卡合孔部522嵌合的锁定部件55。经由齿轮51,通过用于调整对踏板杆20的反作用力的驱动源即马达40,来驱动构成锁定机构451的锁定部件55。由此,直线运动部件52的移动被限制,能够适当地锁定踏板杆20。此外,构成为,通过嵌合将锁定部件55与直线运动部件52进行锁定,从踏板杆20向马达40侧施加的负载ld小于制动扭矩td,由此能够在断开了向马达40的通电的状态下保持锁定状态。由此,与通过始终进行通电来保持锁定状态的情况相比,能够抑制发热,并且能够减少消耗电力。
161.齿轮51具有与驱动用齿条部521嵌合的第1齿轮部511、以及与形成于锁定部件65的锁定用齿条部551嵌合的第2齿轮部512。由此,通过齿轮51能够适当地驱动直线运动部件52以及锁定部件55。
162.锁定用齿条部551与第2齿轮部512的啮合范围小于驱动用齿条部521与第1齿轮部511的啮合范围。由此,锁定部件65的移动范围被限定,因此能够使体格小型化。
163.锁定机构451在全闭状态下锁定踏板杆20。详细来说,卡合孔部522设置在比驱动用齿条部521远离踏板杆20的一侧,并在全闭状态下锁定踏板杆20。由此,即使在锁定状态下马达40产生了异常的情况下,也能够保持油门全闭状态,因此能够确保安全性。另外,卡合孔部522与驱动用齿条部521之间的位置关系,能够通过在其间放入齿轮来反转。对于第2实施方式也相同。
164.在锁定状态下,直线运动部件52与踏板杆20的抵接部位以及直线运动部件52与锁定部件55的抵接部位中的至少一方形成为,在解除锁定时能够弹性变形。在本实施方式中,通过挠性部件构成锁定部件55的卡合部552以及直线运动部件52的弹簧支架部524,由此在解除锁定时能够弹性变形。由此,能够适当地解除锁定状态。另外,只要卡合部552或者弹簧支架部524中的一方能够弹性变形就能够解除锁定,因此另一方也可以形成为不具有挠性而不弹性变形。
165.(第2实施方式)
166.在图12~图15中示出第2实施方式。在第2实施方式~第5实施方式中,动力传递机构与上述实施方式不同,因此以这一点为中心进行说明。动力传递机构60具有齿轮61、直线运动部件62、反作用力调整用施力部件64以及锁定部件65等。在本实施方式的动力传递机构60中,未设置连接销。此外,反作用力调整用施力部件64是拉伸弹簧。
167.在本实施方式中,直线运动部件62的卡合孔部622设置在比驱动用齿条部621靠衬垫21侧的位置。此外,锁定部件65设置在比齿轮61靠衬垫21侧的位置。此外,与上述实施方式相同,当将驱动用齿条部621与齿轮61的第1齿轮611啮合的范围设为α2,将锁定部件65的锁定用齿条部651与齿轮61的第2齿轮部612啮合的范围设为β2时,设定为α2》β2。
168.如图13所示,在本实施方式中,当马达40向将直线运动部件62下拉的方向旋转,反作用力调整用施力部件64的拉力超过踏板施力部件37的施加力时,通过反作用力调整用施力部件64将踏板杆20向踏入方向拉动。由此,通过马达40的驱动,能够将踏板杆20向踏入方向驱动。
169.如图14所示,当马达40向将直线运动部件62推起的方向旋转时,直线运动部件62的弹簧支架部624与衬垫21抵接,通过直线运动部件62将衬垫21直接地推起。即,在本实施方式中,经由反作用力调整用施力部件64间接地将踏板杆20向踏入方向拉动,通过直线运动部件62直接地对踏板杆20施加反作用力。
170.在本实施方式中,如图15所示,当驱动马达40以使齿轮51向纸面逆时针方向旋转时,衬垫21与全开止挡件18抵接。当从该状态起进一步使马达40向相同方向驱动时,齿轮61的第2齿轮部612与锁定部件65的锁定用齿条部651啮合,通过马达40的旋转,锁定部件65被向朝向直线运动部件62的一侧驱动,锁定部件65的卡合部652与直线运动部件62的卡合孔部622嵌合。由此,踏板杆20被锁定。另外,在本实施方式中,由于在油门全开状态下被锁定,因此在系统侧进行控制切断等处理,以便不进行基于油门开度信号的控制。在第5实施方式
中也相同。
171.此处,卡合部652与上述实施方式相同地形成为锥形状,因此在锁定状态下施加了驾驶员踏力时向马达40侧的负载降低。此外,通过将卡合部652的锥形角等的形状设计为,使向马达40侧施加的负载小于踏板施力部件37的弹力,由此即使断开向马达40的通电也能够维持锁定状态。由此,与在锁定中始终进行通电的情况相比,能够减少消耗电力以及发热。
172.在本实施方式中,动力传递机构60具有设置在直线运动部件62与踏板杆20之间的反作用力调整用施力部件64。通过马达40经由反作用力调整用施力部件64对踏板杆20施加打开方向的力。此外,通过马达40经由直线运动部件62对踏板杆20施加关闭方向的力。由此,能够通过马达40主动地施加双方向的力。
173.锁定机构452在全开位置处锁定踏板杆20。详细来说,卡合孔部622设置在比驱动用齿条部621靠踏板杆20侧的位置,在全开状态下锁定踏板杆20。由此,在锁定时,能够较大地确保踏板杆20上侧的空间,因此脚踏板化时的舒适性提高。在本实施方式中,直线运动部件62以及锁定部件65构成锁定机构452。另外,在锁定状态下马达40产生了异常的情况下,在系统侧进行控制,以使发动机不会转速提高。此外,起到与上述实施方式相同的效果。
174.(第3实施方式)
175.在图16~图33中示出第3实施方式。本实施方式的动力传递机构70具有连杆71、连杆侧凸轮72、马达侧凸轮73、拉动保持机构74以及连接销75等。
176.连杆71的一端通过间隙配合而固定于衬垫21,另一端固定于连接销75。连杆71和连接销75中的至少一方具有挠性。连杆侧凸轮72在俯视时形成为大致扇形形状,并形成有孔部721。连接销75贯通孔部721。连杆侧凸轮72能够旋转地支承于与壳体10连接的马达外壳41。此外,连杆侧凸轮72在油门全闭时与形成于马达外壳41的止挡面411抵接,由此旋转区域被限制。此外,设置成,在油门全开状态下,连杆侧凸轮72不与马达外壳41抵接。换言之,在油门全闭到全开的范围内,马达外壳41不限制连杆侧凸轮72的动作。连杆侧凸轮72可以按照图22所示的侧视图中心线而由两张板构成,也可以由一张板构成。
177.基于图26对孔部721的详细情况进行说明。在图26中,用实线表示与返回侧壁部726抵接的状态的连接销75,用点划线表示与踏入侧壁部727抵接的状态的连接销75。
178.在孔部721的内周侧设置有限制壁723,在连接销75与返回侧壁部726抵接的状态下,该限制壁723限制向踏入侧壁部727的移动。限制壁723的高度h1形成为连接销75的外径的一半以上。限制壁723可以如图26的(a)所示那样立起设置在孔部721的内周侧,也可以如图26的(b)所示那样通过在返回侧壁部726侧形成能够收纳连接销75的凹部728而构成。
179.此外,将孔部721的径向大小设定为,连接销75能够越过限制壁723而移动至踏入侧壁部727。具体而言,此外,孔部721的径向大小h2形成得大于限制壁723的高度h1 连接销75的直径r。即,h2》(h1 r)。
180.以下,对限制壁723如图26的(a)那样立起形成的例子进行说明。此外,如图25所示,在连杆侧凸轮72中,将到孔部721的内周侧为止的最小距离设为最小径l1,将到限制壁723的顶点为止的长度设为顶点径l2,将到孔部721的外周侧为止的最大距离设为最大径l3。径l1~l3成为与孔部721的形状相应的部位的长度,例如如果孔部721的内周侧直线地形成,则是将旋转中心与内周壁连结的直线变得垂直的部位处的长度成为最小径l1这样的
情形。
181.如图27等所示,马达侧凸轮73在俯视时形成为大致扇形形状,并设置成在两侧能够与连接销75抵接。马达侧凸轮73能够旋转地支承于马达外壳41,由马达40旋转驱动。马达侧凸轮73与连杆侧凸轮72的旋转中心一致,以旋转不被限制而能够360
°
旋转的方式设置于马达外壳41。
182.锁定侧抵接部731从旋转中心起以长度变得大于连杆侧凸轮72的最大径l3的方式沿着径向延伸形成。解除侧端部732侧的径向外侧被切除,形成解除斜面733以及拉动时抵接壁部734。
183.解除斜面733相对于从旋转中心起的放射线方向(即,径向)倾斜地形成。解除斜面733的开放侧端部离旋转中心的距离比最小径l1靠旋转中心侧,拉伸时抵接壁部734侧的端部离旋转中心的距离比顶点径l2靠外侧。解除斜面733的长度被设置为能够通过旋转来推起连接销75的长度。拉动时抵接壁部734在解除斜面733的锁定侧抵接部731侧从旋转中心向放射线方向形成。
184.如图21、图23以及图24所示,拉动保持机构74是拉伸弹簧,一端与连接销75抵接,另一端通过拉伸弹簧安装棒741而固定于连杆侧凸轮72。拉动保持机构74例如埋入于连杆侧凸轮72,并位于凸轮的中心,由此使对连接销75施加的力不倾斜。此外,拉动保持机构74也可以设置在连杆侧凸轮72的与马达侧凸轮73相反侧的表面等、不妨碍马达侧凸轮73的动作的任意部位。
185.在本实施方式中,如图28中示意性地所示,通过马达40的驱动,能够经由凸轮72、73以及连杆71主动地将踏板杆20向踏入方向以及返回方向驱动。基于图29对通过马达40的驱动而将踏板杆20向踏入方向驱动的状态进行说明。在图29~图32以及与后述的实施方式相关的图39中,为了进行说明,用虚线表示拉动保持机构74。
186.在将踏板杆20向踏入方向驱动的情况下,当驱动马达40以使马达侧凸轮73向纸面逆时针方向旋转时,连接销75与拉动时抵接壁部734抵接。此时,连接销75在连杆侧凸轮72的孔部721内、在径向外侧与踏入侧壁部727抵接(参照图26)。从该状态起,驱动马达40以使马达侧凸轮73向逆时针方向旋转,由此能够从马达侧凸轮73经由连接销75以及连杆71将踏板杆20向踏入方向拉动。
187.基于图30对通过马达40的驱动而将踏板杆20向返回方向驱动的状态进行说明。当驱动马达40以使马达侧凸轮73向纸面顺时针方向旋转时,连接销75与锁定侧抵接部731抵接。当从该状态起驱动马达40以使马达侧凸轮73向顺时针方向旋转时,连接销75由锁定侧抵接部731驱动而在连杆侧凸轮72的孔部721内移动,当经由引导部724而越过限制壁723时,与返回侧壁部726抵接。此外,在连接销75与返回侧壁部726抵接的状态下,当驱动马达40以使马达侧凸轮73向顺时针方向旋转时,能够从马达侧凸轮73经由连接销75以及连杆71对踏板杆20施加反作用力。
188.此外,如图31所示,在连接销75与锁定侧抵接部731抵接的状态下,当进一步驱动马达40以使马达侧凸轮73向逆时针方向旋转时,连杆侧凸轮72与止挡面411(参照图17)抵接。由此,踏板杆20在全闭状态下被锁定。此外,在锁定状态下,当断开马达40的通电时,通过拉动保持机构74将连接销75向逆时针方向拉动,但移动被限制壁723限制。由此,即使断开马达40,也能够维持锁定状态。此外,当在锁定状态下施加踏力时,对连杆侧凸轮72施加
顺时针方向的扭矩,但该扭矩施加于止挡面411,因此不对马达40侧施加负载。即,即使在锁定状态下施加踏力,也能够维持对马达40侧无负载的状态。
189.基于图32以及图33对锁定解除进行说明。图32是从连杆侧凸轮72侧观察的图,用实线表示锁定解除前,用双点划线表示锁定解除后。为了避免变得复杂,而省略了锁定解除后的拉动保持机构74。图33是从马达侧凸轮73侧观察的图。
190.在解除锁定状态时,当使马达侧凸轮73旋转以使连接销75成为解除侧端部732时,解除斜面733与连接销75抵接。当从该状态起驱动马达40以使马达侧凸轮73向推压连接销75的方向旋转时,通过解除斜面733将连接销75推起,当越过限制壁723时,通过拉动保持机构74的拉力将连接销75向踏入侧壁部727侧拉动,由此锁定状态被解除。
191.在本实施方式中,动力传递机构70具有作为通过马达40而旋转的凸轮的马达侧凸轮73、以及一端与踏板杆20连接而另一端与马达侧凸轮73卡合的连杆71。由此,马达40能够经由动力传递机构70主动地对踏板杆20施加双方向的力。
192.动力传递机构70具有作为驱动源侧凸轮的马达侧凸轮73、连杆侧凸轮72以及连接销75。连杆侧凸轮72设置在马达侧凸轮73的连杆71侧,且形成有孔部721。连接销75能够移动地插通于孔部721,一端与连杆71连接,另一端侧能够与马达侧凸轮73以及连杆侧凸轮72抵接。
193.通过马达侧凸轮73将连接销向孔部721的一方的壁部即返回侧壁部726侧推压来对踏板杆20施加关闭方向的力,通过向另一方的壁部即踏入侧壁部727侧推压来对踏板杆20施加打开方向的力。由此,能够通过马达40主动地施加双方向的力。
194.锁定机构453包括连杆侧凸轮72。连杆侧凸轮72与设置于作为外壳的马达外壳41的作为锁定部的止挡面411抵接,由此将踏板杆20进行锁定。由此,能够将踏板杆20适当地进行锁定。在本实施方式中,连杆侧凸轮72以及马达外壳41构成锁定机构453。此外,连杆侧凸轮72与止挡面411抵接的位置对应于“锁定位置”。
195.在孔部721形成有限制壁723,该限制壁723限制连接销向从在踏板杆20被锁定的状态下连接销75所抵接的壁部即作为锁定侧壁部的返回侧壁部726分离的一侧移动。由此,即使断开马达40,也能够适当地维持锁定状态。
196.动力传递机构70具有拉动保持机构74,该拉动保持机构74将连接销75向连接销75远离返回侧壁部726的方向拉动。在马达侧凸轮73形成有能够从限制壁723的相反侧推起连接销75的解除斜面733。由此,通过马达40的驱动,能够适当地解除锁定状态。此外,起到与上述实施方式相同的效果。
197.(第4实施方式)
198.在图34~图38b中示出第4实施方式。本实施方式是第3实施方式的变形例,图34是与第3实施方式的图18对应的示意性的截面图,且是图35中的xxxiv-xxxiv线截面图。在本实施方式中,在马达外壳41上形成有收纳锁定止挡件76以及止挡件施力部件77的收纳凹部413。锁定止挡件76具有位于收纳凹部413内的基部761以及在通常时从收纳凹部413突出的突出部762,锁定止挡件76被设置成能够在收纳凹部413内滑动。如图38所示,在突出部762的与连杆侧凸轮72对置的一侧形成有倾斜面763。此外,在连杆侧凸轮72上形成有能够与锁定止挡件76的倾斜面763抵接的倾斜面729。
199.在本实施方式中,除了在锁定时连杆侧凸轮72代替与马达外壳41的止挡面411抵
接而与锁定止挡件76抵接这一点以外,动作与上述实施方式相同。在本实施方式中,通过将锁定止挡件76设为可动,由此构成能够通过踏力来解除锁定的故障保险机构。
200.如图38a所示,在锁定时,连杆侧凸轮72的倾斜面729与锁定止挡件76的倾斜面763抵接,由此踏板杆20被锁定。此外,如图38b所示,当由于施加过大的踏力,而将锁定止挡件76向收纳凹部413压入的方向的踏力的分力超过止挡件施力部件77的施加力时,锁定止挡件76被压入收纳凹部413,由此允许连杆侧凸轮72旋转,锁定状态被解除。当锁定止挡件76收纳于收纳凹部413时,连杆侧凸轮72能够在到与故障时止挡面414抵接为止的范围内旋转,能够将踏板杆20以微小开度α踏入(参照图36)。由此,即使在马达40产生了异常的情况下,也能够实现避让行驶。
201.在本实施方式中,连杆侧凸轮72与锁定止挡件76抵接,由此将踏板杆20进行锁定。锁定止挡件76收纳在设置于马达外壳41的收纳凹部413中。当对踏板杆20施加规定以上的力时,克服将锁定止挡件76向连杆侧凸轮72侧施力的止挡件施力部件77的施加力而将锁定止挡件76收纳于收纳凹部413,由此能够锁定解除。由此,能够适当地解除锁定状态。此外,起到与上述实施方式相同的效果。
202.在本实施方式中,连杆侧凸轮72以及锁定止挡件76构成锁定机构454,锁定止挡件76对应于“锁定部”,连杆侧凸轮72与锁定止挡件76抵接的位置对应于“锁定位置”。
203.(第5实施方式)
204.在图39中示出第5实施方式。图39是与图16对应的图。在本实施方式的动力传递机构80中,相对于第3实施方式以及第4实施方式,连杆侧凸轮82以及马达侧凸轮83反转这一点不同,在油门全开状态下将踏板杆20锁定。图39表示锁定状态,连杆侧凸轮82与锁定止挡件76抵接。此外,插入到连杆侧凸轮82的孔部821中的连接销75位于踏入侧壁部827侧,通过限制壁823来限制连接销75向返回侧壁部826侧移动。在锁定状态下,由锁定止挡件76承受踏板施力部件37的施加力,因此不对马达40侧施加负载。
205.在本实施方式中,当驱动马达40以使马达侧凸轮83向图39的纸面逆时针方向旋转时,能够从马达侧凸轮73经由连接销75以及连杆71将踏板杆20拉向踏入方向。此外,当驱动马达40以使马达侧凸轮83向纸面顺时针方向旋转时,能够从马达侧凸轮73经由连接销75以及连杆71对踏板杆20施加反作用力。
206.关于锁定机构的工作以及锁定解除动作,只要使旋转方向与第3实施方式相反则相同,因此省略说明。在图39中,如第4实施方式那样,通过使连杆侧凸轮82与锁定止挡件76抵接来锁定踏板杆20。在本实施方式中,连杆侧凸轮82以及锁定止挡件76构成锁定机构455。此外,也可以如第3实施方式那样,通过使连杆侧凸轮82与马达外壳41的止挡面411(在图39中未图示)抵接来进行锁定。
207.在本实施方式中,在孔部821形成有限制壁823,该限制壁823限制连接销75向从在踏板杆20被锁定的状态下连接销75所抵接的壁部、即作为锁定侧壁部的踏入侧壁部827分离的方向移动。即使如此构成,也起到与上述实施方式相同的效果。在本实施方式中,马达侧凸轮83对应于“凸轮”,连杆侧凸轮82对应于“锁定部件”,踏入侧壁部827对应于“锁定侧壁部”。
208.(第6实施方式)
209.在图40~图52中示出第6实施方式。油门装置2具备壳体110、踏板杆120、马达40以
及动力传递机构150等。壳体110能够安装于车身,在内部收纳踏板35、马达40以及动力传递机构150等。在壳体110中形成有收纳后述的齿条壳体160的齿条壳体收纳室111以及收纳锁定销施力部件195的锁定收纳室112。
210.第1实施方式的油门装置1中的踏板杆20的踏板35相对于臂31设置在支点部件23侧,与此相对,本实施方式的踏板杆120的踏板35相对于臂31设置在支点部件23的相反侧。踏板杆120除了踏板35以及踏板施力部件37等的配置不同这一点之外,功能等与第1实施方式的踏板杆20相同,因此标注相同的符号并省略说明。在本实施方式中,在臂31的支点部件23侧配置有马达40以及动力传递机构150等。
211.动力传递机构150具有减速齿轮151~153、齿条壳体160、弹簧壳体170、支架180以及反作用力调整用施力部件185等。减速齿轮151~153分别具有大径部以及小径部,且能够旋转地支承于壳体110的侧面。在壳体110安装有收纳齿轮151~153的齿轮罩115。图41以及图43表示卸下了齿轮罩115的状态。在本实施方式中,减速齿轮151~153由3个齿轮构成,但也可以根据所要求的减速比来适当设定。第1级的齿轮151的大径部与和马达40的输出轴一体地旋转的马达齿轮49啮合。
212.位置传感器155检测最终级的齿轮153的旋转位置。本实施方式的位置传感器155是编码器,但也可以使用编码器以外的装置。ecu90(参照图1)基于位置传感器155的检测值等对马达40的驱动进行控制。
213.如图43~图45所示,齿条壳体160形成为大致圆筒状。在壳体110形成有向衬垫21侧开口的齿条壳体收纳室111,齿条壳体160收纳于齿条壳体收纳室111。以下,将齿条壳体160的衬垫21侧设为顶壁161,将与衬垫21相反侧的面设为底壁162。齿条部165向周壁面163的外侧突出,并沿着轴向延伸形成。齿条部165与齿轮153的小径部啮合。
214.在隔着轴线而与齿条部165相反侧的周壁面163上,沿着轴向延伸地形成有引导部167。引导部167与形成于壳体110的引导槽113能够滑动地嵌合。此外,在周壁面163的支点部件23侧形成有向径向外侧突出的锁定卡止部168。
215.当通过马达40的旋转而减速齿轮151~153旋转时,齿条壳体160沿着轴向移动。在本实施方式中,通过齿轮153向逆时针方向旋转,由此齿条壳体160向接近衬垫21的一侧移动,通过齿轮153向顺时针方向旋转,由此齿条壳体160向远离衬垫21的方向移动。以下,将齿条壳体160向接近衬垫21的方向的移动设为上升,将向远离衬垫21的方向的移动设为下降。
216.在齿条壳体160的内部形成有沿着轴向延伸的突起166。在顶壁161上,在突起166的径向外侧开口,弹簧壳体170能够沿着轴向移动地插通于该开口。
217.弹簧壳体170形成为大致筒状。弹簧壳体170配置在突起166的径向外侧,且设置成能够相对于齿条壳体160沿着轴向相对移动。在弹簧壳体170的衬垫21侧的端部形成有卡止孔171。设置于衬垫21的连接销22插入在卡止孔171中。由此,衬垫21与弹簧壳体170被连接。在弹簧壳体170的与衬垫21相反侧的端部,形成有从筒部向径向内侧以及外侧延伸的卡止壁173。通过卡止壁173与顶壁161或者底壁162抵接,由此限制弹簧壳体170相对于齿条壳体160的移动范围。
218.支架180形成为向与衬垫21相反侧开口的大致有底筒状,且被设置成为弹簧壳体170的径向内侧且是齿条壳体160的突起166的径向外侧。在支架180的开口侧形成有向径向
外侧延伸的卡止部181。
219.反作用力调整用施力部件185是压缩螺旋弹簧,配置在弹簧壳体170与支架180之间。反作用力调整用施力部件185的衬垫21侧的端部卡止于弹簧壳体170,与衬垫21相反侧的端部卡止于支架180的卡止部181。
220.锁定部190具有锁定销191以及锁定销施力部件195。在壳体110的与锁定卡止部168对置的部位,形成有将齿条壳体收纳室111与锁定收纳室112连通的连通部116。锁定销191设置为,一端从连通部116突出而能够与锁定卡止部168抵接,另一端收纳于锁定收纳室112。锁定销191设置成能够向与齿条壳体160的移动方向不同的方向移动。在本实施方式中,锁定销191设置成能够沿着与齿条壳体160的移动方向正交的方向移动。锁定销191的移动方向只要与齿条壳体160的移动方向不同即可,也可以不是正交方向。
221.锁定销施力部件195收纳于锁定收纳室112。锁定销施力部件195的一端卡止于壳体110,另一端卡止于锁定销191。锁定销施力部件195将锁定销191向接近齿条壳体160的方向施力。
222.基于图44~图52对油门装置2的工作进行说明。图44、图46、图47、图59以及图51是与图43中的xliv-xliv截面对应的图,图45、图48、图50以及图52是与图43中的xlv-xlv截面对应的图。
223.图44~图46示出了不向马达40进行通电而不经由动力传递机构150对踏板杆120施加向返回方向或者踏入方向的力的状态。如图44以及图45所示,在踏板杆120全闭时,弹簧壳体170成为被踏板杆120拉起的状态。如图46所示,在踏板杆120全开状态时,弹簧壳体170成为被踏板杆120压下的状态。此时,卡止壁173与底壁162的衬垫侧的面分离。
224.在马达40处于无通电状态时,在踏板杆120从全闭到全开的整个区域中,在范围rm内使弹簧壳体170在齿条壳体160内空摆,由此能够避免齿槽扭矩的影响。由此,能够通过踏板主体的设计来调整驾驶员的踏力感觉。此外,在马达40处于无通电状态时,齿条壳体160的底壁162的与衬垫21相反侧的面与壳体110分离。
225.如图47以及图48所示,在将踏板杆120向踏入方向驱动的情况下,当使齿轮153向顺时针方向旋转时,齿条壳体160下降,顶壁161与弹簧壳体170的卡止壁173抵接。在顶壁161与卡止壁173抵接的状态下,当使齿条壳体160进一步下降时,经由弹簧壳体170将衬垫21向油门打开方向拉入。
226.如图49以及图50所示,在将踏板杆120向返回方向驱动的情况下,当使齿轮153向逆时针方向旋转时,齿条壳体160上升,齿条壳体160的突起166的前端与支架180抵接。当从该状态起使齿条壳体160进一步上升时,支架180被突起166推起,由此反作用力调整用施力部件185被压缩,通过反作用力调整用施力部件185的施加力对踏板杆120施加反作用力。
227.如图51以及图52所示,当使齿条壳体160上升时,齿条壳体160的锁定卡止部168与锁定销191抵接。当使齿条壳体160进一步上升时,锁定卡止部168沿着锁定销191的倾斜面移动,并将锁定销191压入。当锁定卡止部168越过锁定销191时,踏板杆120被锁定。此时,锁定卡止部168与锁定销191的抵接面的倾斜角等被设定为,即使以小于规定的锁定解除踏力的力踏入踏板杆120也能够保持锁定状态。对于第7实施方式的锁定销261以及锁定卡止部229的抵接面也相同。
228.在踏板杆120被锁定的状态下,以规定的锁定解除踏力以上的力踏入踏板杆120或
者使齿轮153向顺时针方向旋转,由此当向将锁定销191压入的方向施加的分力超过锁定销施力部件195的施加力时,一边沿着锁定卡止部168的倾斜面压入锁定销191,一边使齿条壳体160下降。当锁定卡止部168再次越过锁定销191时,踏板杆120的锁定被解除。在本实施方式中,齿条壳体160以及锁定部190构成锁定机构456。
229.在本实施方式中,锁定部190设置于全闭锁定位置,但也可以在踏板杆120的全闭位置到全开位置之间的中间位置能够进行锁定的部位设置锁定部190以及锁定卡止部168,并在中间位置处限制踏板杆120向踏板杆120的打开方向的动作。在该情况下,不限制踏板杆120向关闭方向的动作。由此,能够保留故障保险时的踩踏量。
230.动力传递机构150具有:由马达40驱动的齿轮151~153;具有齿条部165的齿条壳体160;与踏板杆120一体地驱动的弹簧壳体170;反作用力调整用施力部件185;以及支架180。反作用力调整用施力部件185的一端卡止于弹簧壳体179,另一端卡止于支架180。支架180设置成能够通过齿条壳体160而相对于弹簧壳体170相对移动。由此,能够通过马达40主动地施加踏入方向以及返回方向的双方向的力。
231.锁定机构456具有设置在从马达40到踏板杆120的动力传递路径上的锁定卡止部168、以及能够通过弹性力进行移动或者变形的锁定销191。锁定机构456通过锁定卡止部168越过锁定销191而卡止于锁定销191,由此限制踏板杆120的动作。
232.详细来说,锁定机构456具有锁定销191,该锁定销191能够向与弹簧壳体170的移动方向不同的方向移动,通过对形成于齿条壳体160的锁定卡止部168进行卡止,由此能够限制踏板杆120。由此,能够适当地限制踏板杆120的动作。此外,起到与上述实施方式相同的效果。
233.在本实施方式中,齿条壳体160对应于“直线运动部件”,弹簧壳体170对应于“壳体部件”,锁定销191对应于“锁定部件”,锁定销施力部件195的弹力对应于“弹力”。此外,锁定卡止部168与构成动力传递机构150的齿条壳体160一体地设置,能够理解为“设置于动力传递路径”。
234.(第7实施方式)
235.在图53~图68中示出第7实施方式。油门装置3的动力传递机构200具有马达齿轮204、锥齿轮205、第1正齿轮210、第2正齿轮220、第3正齿轮230、扭簧245、凸轮250以及锁定部260等。
236.马达201例如是dc马达,产生旋转力,收纳于马达壳体202。马达201被设置成,未图示的旋转轴与壳体10的顶壁部11大致平行。
237.马达齿轮204与马达201的轴一体地旋转。锥齿轮205与马达齿轮204啮合,并通过轴211与第1正齿轮210连接。轴211能够旋转地支承于连接器壳体203以及齿轮罩206。
238.齿轮罩206设置于马达201以及连接器壳体203的侧面,收纳正齿轮210、220、230以及凸轮250等。齿轮罩206通过自攻螺钉等固定部件207而固定于连接器壳体203以及马达壳体202。在齿轮罩206上设置有检测第2正齿轮220的旋转的未图示的旋转角传感器。
239.如图55、图59以及图60等所示,第2正齿轮220具有向与马达壳体202相反侧开口的内筒部221、向马达壳体202侧开口的外筒部224等,由树脂等一体地形成。轴240被压入到内筒部221的底部222。在内筒部221的内周侧插入有设置了旋转角传感器的传感器保持部208。在内筒部221的能够由旋转角传感器检测到的部位设置有磁铁209。
240.在外筒部224的开口侧形成有与第1正齿轮210啮合的齿轮部225。在内筒部221与外筒部224之间形成有收纳扭簧245的收纳室226。在收纳室226中突出地形成有对扭簧245的一端进行卡止的销227。
241.在外筒部224的内壁上形成有在俯视时形成为大致l字形状的卡止壁228。在本实施方式中,卡止壁228隔着轴线而形成在两处。此外,在外筒部224的径向外侧突出地形成有锁定卡止部229。
242.第3正齿轮230具有基部231、齿轮部232、插入部233、卡止凸部236、销237等,由树脂等一体地形成。齿轮部232向基部231的与第2正齿轮220相反一侧突出地形成。插入部233向基部231的第2正齿轮220侧突出地形成,并插入到外筒部224的径向内侧。在齿轮部232以及插入部233上形成有供轴240插通的插通孔234。
243.卡止凸部236在基部231外周侧的两处向第2正齿轮220侧突出地形成,并插入到卡止壁228与外筒部224之间的空间,销237向基部231的第2正齿轮220侧突出地形成。
244.扭簧245收纳于第2正齿轮220的收纳室226,一端卡止于第2正齿轮220的销227,另一端卡止于第3正齿轮230的销237。当通过马达201的驱动而第2正齿轮220旋转时,第2正齿轮220以及第3正齿轮230成为一体地旋转,直到扭簧245的设定载荷为止,当超过设定载荷时,第2正齿轮220与第3正齿轮230分离,即使第2正齿轮220旋转,第3正齿轮230也不旋转。
245.如图57等所示,凸轮250具有主体部251、齿轮部252以及凸轮杆253。主体部251在俯视时形成为大致圆形,能够旋转地支承于马达壳体202以及齿轮罩206。齿轮部252从主体部251向径向外侧突出地形成,并与第3正齿轮230的齿轮部232啮合。
246.凸轮杆253位于主体部251的径向外侧,且相对于主体部251的旋转轴而向与齿轮部232大致相反侧延伸形成。在凸轮杆253的前端侧设置有孔部254。设置于臂31的连接销32插通于孔部254。
247.如图61所示,锁定部260具有锁定销261、弹性部件263以及锁定销壳体265等。锁定销261突出地设置于平板部262的一个面。弹性部件263是压缩螺旋弹簧,且设置在平板部262的与设置有锁定销261的面相反的面侧。锁定销壳体265形成为大致圆筒形状,在底部形成有取出锁定销261的孔部266。在锁定销壳体265的筒部的径向外侧形成有固定部257。在能够通过平板部262压缩弹性部件263的状态下,通过卡扣配合等将固定部267固定于连接器壳体203,由此锁定部260被固定于连接器壳体203。
248.此处,对动力传递机构200的工作进行说明。以下,将使凸轮250向图62等中的顺时针方向旋转时的马达201的旋转方向设为正,将向逆时针方向旋转时的马达201的旋转方向设为负。
249.图62以及图63示出不向马达201进行通电而不经由动力传递机构200对踏板杆20施加返回或者踏入方向的力的状态。如图62所示,在踏板杆20处于全闭状态时,凸轮杆253成为被衬垫21拉起的状态。图63表示踏板杆20的全开状态。当衬垫21被踏入时,凸轮250与踏板杆20一起旋转。此时,在马达40中产生齿槽扭矩。
250.图64表示踏板杆20处于全闭与全开的中间位置的状态。通过使马达201向负方向旋转,使凸轮250向逆时针方向旋转,由此能够将踏板杆20向踏入方向驱动。此外,通过使马达201向正方向旋转,使凸轮250向顺时针方向旋转,由此能够对踏板杆20施加返回方向的反作用力。此时,第2正齿轮220的锁定卡止部229与锁定销261分离,齿轮的旋转未被限制。
251.如图62以及图65所示,当臂31与全闭止挡件17抵接时,凸轮250向顺时针方向的旋转被限制。当在该状态下使马达201向正方向旋转,并使第1正齿轮210超过扭簧245的设定载荷地旋转时,由于扭簧245扭转,因此第2正齿轮220向逆时针方向旋转。由此,如图65所示,锁定卡止部229利用推力将锁定销261压入,将弹性部件263压缩。
252.如图67以及图68所示,当锁定卡止部229越过锁定销261时,踏板杆20被锁定。在踏板杆20被锁定的状态下,当以规定的锁定解除踏力以上的力踏入踏板杆20或者将马达201向负方向驱动,由此通过向压入锁定销261的方向施加的分力将弹性部件263压缩时,当锁定卡止部229再次越过锁定销261时,踏板杆20的锁定被解除。在本实施方式中,锁定部260以及第2正齿轮220构成锁定机构457。此外,锁定机构457是柱塞方式。
253.动力传递机构200具有由马达201驱动并与踏板杆20连接的凸轮250。在马达201与凸轮250之间设置有构成减速机构的齿轮210、220、230。由此,马达40能够经由动力传递机构70对踏板杆20主动地施加双方向的力。
254.在减速机构中包括同轴地配置的驱动源侧齿轮即第2正齿轮220以及凸轮侧齿轮即第3正齿轮230,在第2正齿轮220与第3正齿轮230之间设置有作为齿轮间施力部件的扭簧245。当使第2正齿轮220向反作用力施加方向旋转时,第3正齿轮230与第2正齿轮220一体地旋转直到成为扭簧245的设定载荷为止,当超过扭簧245的设定载荷时不旋转。
255.锁定机构457具备与第2正齿轮220一体地旋转的锁定卡止部229、以及在第3正齿轮230不旋转而第2正齿轮220旋转的区域中能够卡止锁定卡止部229的锁定销261。由此,能够适当地限制踏板杆20的动作。此外,起到与上述实施方式相同的效果。
256.在本实施方式中,马达201对应于“驱动源”,第2正齿轮220对应于“驱动源侧齿轮”,第3正齿轮230对应于“凸轮侧齿轮”,扭簧245对应于“齿轮间施力部件”,锁定销261对应于“锁定部件”,弹性部件263的弹力对应于“弹力”。此外,锁定卡止部229与构成动力传递机构200的第2正齿轮220一体地设置,能够理解为“设置于动力传递路径”。
257.(第8实施方式)
258.在图69中示出第8实施方式。在第8实施方式中,在第2正齿轮220与第3正齿轮230之间设置有扭簧245。在第8实施方式中,在第2正齿轮220与第3正齿轮230之间设置有作为齿轮间施力部件的压缩螺旋弹簧248。在第2正齿轮220的外筒部224的内壁上,代替卡止壁228以及销227而形成有卡止壁288、289。此外,在第3正齿轮230上,代替卡止凸部236以及销237而设置有卡止凸部239。
259.卡止凸部239设置为,处于第2正齿轮220的两个卡止壁288、289之间。压缩螺旋弹簧248设置在卡止壁289与卡止凸部239之间,将第3正齿轮330向油门关闭方向施力。卡止凸部239设置成,能够通过压缩螺旋弹簧248的施加力而与卡止壁288抵接。卡止壁288、289以及卡止凸部239根据压缩螺旋弹簧248的设定长度来设置。在本实施方式中,与第7实施方式相同,第2正齿轮220与第3正齿轮230一体地旋转直到成为压缩螺旋弹簧248的设定载荷为止,当超过设定载荷时,第3正齿轮230不旋转,第2正齿轮220旋转。即使如此构成,也起到与上述实施方式相同的效果。
260.(第9实施方式)
261.第9实施方式~第15实施方式的锁定机构与上述实施方式不同,因此以这一点为中心进行说明。此处说明的锁定机构可以与任一个实施方式的动力传递机构组合。图70a以
及图70b示意性地表示第7实施方式的锁定机构457,通过第2正齿轮220(在图70a以及图70b中未图示)的旋转而锁定卡止部229通过推力将锁定销261压入,由此锁定卡止部229越过锁定销261而踏板杆20被锁定。
262.为了能够通过锁定卡止部229对锁定销261产生推力,在使锁定卡止部229向锁定方向移动时进行抵接的锁定卡止部229与锁定销261的抵接面中的至少一方优选为倾斜面。同样,在使锁定卡止部229向锁定解除方向移动时进行抵接的锁定卡止部229与锁定销261的抵接面中的至少一方优选为倾斜面。倾斜角度等可以根据锁定、锁定解除所需要的扭矩等而任意地设定。另外,倾斜面并不限定于平面,例如在将锁定销261的前端面形成为圆顶状的情形下,也可以是曲面。对于第9实施方式也相同。
263.在图71a、图71b以及图71c所示的第9实施方式的锁定机构458中,锁定销268由橡胶等具有挠性的材料形成。如图71b中箭头所示,锁定卡止部229移动而使锁定销268弯曲,由此锁定卡止部229越过锁定销268,踏板杆20被锁定(参照图71c)。即使如此构成,也起到与上述实施方式相同的效果。在本实施方式中,锁定销268对应于“锁定部件”,锁定销268本身的弹力对应于“弹力”。
264.(第10实施方式)
265.在图72a、图72b以及图72c中示出第10实施方式。在本实施方式中,作为锁定机构459而具有磁性体301、磁铁302以及弹性部件303。磁性体301设置于衬垫21。磁铁302设置在壳体10的与磁性体301对置的部位。弹性部件303收纳在设置于壳体10的收纳室304,一端卡止于收纳室304的内壁,另一端与磁铁302连接。另外,也可以使衬垫21侧为磁铁302,使壳体10侧为磁性体301。
266.在本实施方式中,磁性体301与磁铁302相互吸引,由此能够在全开状态下锁定衬垫21。此外,通过从锁定状态起进一步踏入衬垫21并压缩弹性部件303,由此通过弹性部件303的反作用力将磁性体301与磁铁302拉开,由此能够解除锁定状态。即使如此构成,也起到与上述实施方式相同的效果。在本实施方式中,壳体10对应于“外壳”。
267.(第11实施方式~第14实施方式)
268.在图73a以及图73b中示出第11实施方式,在图74a以及图74b示出第12实施方式,在图75a以及图75b中示出第13实施方式,在图76a以及图76b中示出第14实施方式。如图73a~图76b所示,在臂31上形成有嵌合部33,锁定销311、312进行嵌合,由此锁定踏板杆20。通过以与锁定销311嵌合的部位成为多级的方式形成嵌合部33,由此能够在从全闭到全开的中间位置处阶段性地锁定踏板杆20。在图73a~图76b中,锁定销311、312构成锁定机构460。
269.在图73a以及图73b所示的第11实施方式中,前端形成为凸状的锁定销311由作为锁定用的驱动源的马达315驱动。在图74a以及图74b所示的第12实施方式中,前端形成为凹状的锁定销312由马达315驱动。
270.在图75a以及图75b所示的第13实施方式中,前端形成为凸状的锁定销311由作为锁定用的驱动源的螺线管316驱动。在图76a以及图76b所示的第14实施方式中,前端形成为凹状的锁定销312由螺线管316驱动。
271.在本实施方式中,在作为用于施加反作用力的驱动源的马达40之外设置有锁定用的驱动源。由此,锁定机构的自由度提高。锁定用的驱动源可以如第11实施方式以及第12实施方式那样是马达315,也可以如第13实施方式以及第14实施方式那样是螺线管316。
272.锁定机构460具有能够通过与形成于踏板杆20的嵌合部33嵌合来限制踏板杆20的动作的锁定销311、312。由此,能够适当地限制踏板杆的动作。嵌合部33以及锁定销311、312只要能够通过嵌合来锁定踏板杆20即可,形状等也可以与图73a~图76b不同。即使如此构成,也起到与上述实施方式相同的效果。在第11实施方式~第14实施方式中,锁定销311、312对应于“锁定部件”。
273.(第15实施方式)
274.在图77中示出第15实施方式。在本实施方式中,锁定机构461具有锥齿轮323、进给丝杠324以及锁定用衬垫325。通过作为锁定用的驱动源的马达321的旋转,经由马达齿轮322、锥齿轮323以及进给丝杠324来驱动锁定用衬垫325,通过锁定用衬垫325夹入臂31,由此通过摩擦力来锁定踏板杆20。
275.在本实施方式中,锁定机构461具有设置成能够夹入踏板杆20的锁定用衬垫325,锁定用衬垫325通过夹入踏板杆20来限制踏板杆20的动作。由此,能够在从全闭到全开的任意位置处限制踏板杆20的动作。只要能够通过由驱动源驱动的衬垫来夹入踏板杆20即可,夹入位置、齿轮的构成等也可以不同。即使如此构成,也起到与上述实施方式相同的效果。
276.(第16实施方式)
277.在图78~图80中示出第16实施方式。在第16实施方式中,主要对油门装置的控制进行说明。在图78中例示了第1实施方式的动力传递机构50,但也可以应用第2实施方式以后的实施方式的构成。油门装置100除了壳体10、踏板杆20、马达40以及动力传递机构50等之外,还具备作为控制部的ecu90。ecu90例如可以由发动机ecu、制动器ecu等已有的ecu构成,也可以为了马达40的控制而另行设置。此外,与控制构成相关的功能块也可以由不同的ecu构成,并通过通信等来共享信息。
278.ecu90以微型计算机等为主体而构成,在内部具备均未图示的cpu、rom、ram、i/o、以及连接这些构成的总线等。ecu90的各处理可以是通过cpu执行预先存储在rom等实体存储装置(即,可读取的非暂时有形记录介质)的程序的软件处理,也可以是基于专用电路的硬件处理。
279.ecu90作为功能块而具有驱动控制部91、踏错判定部92以及档位判定部93等。驱动控制部91基于油门开度传感器39以及位置传感器59的检测值等,对马达40的驱动进行控制。
280.踏错判定部92判定是否视为驾驶员踏错了踏板杆20。在本实施方式中,在通过周边检测传感器96检测到障害物且踏板杆20被踏入的情况下,判定为踏错。周边检测传感器96例如是红外线传感器、声呐等。
281.此外,基于油门开度传感器39的检测值,在踏板杆20的踏入速度为踏错判定值以上的情况下,判定为踏错。此处,假定为紧急制动,在踏板杆20被急剧地踏入的情况下,判定为踏错。踏错判定值被设定为比在通常的踏板杆操作中假定的踏入速度大的任意值。
282.档位判定部93基于来自换挡杆95的信号,判定换挡档位。另外,也可以构成为,代替直接取得来自换挡杆95、换挡开关等的信号,而从上位ecu等其他ecu取得与换挡档位相关的信息。锁定解除开关97例如设置在手柄周边等驾驶员能够用手操作的部位。
283.在本实施方式中,在判定为踏板杆20的踏错的情况下,驱动控制部91驱动马达40,将踏板杆20进行锁定。此外,在判定为踏板杆20的踏错的情况下,也可以代替踏板杆20的锁
定而控制马达40以将踏板杆20向返回方向驱动。由此,使驾驶员认识到踏错了踏板杆20的情况,例如引导其换踏到制动踏板。
284.此外,在本实施方式中,在换挡档位为倒挡(r)时,驱动控制部91驱动马达40,将踏板杆20进行锁定。在换挡档位为倒挡时、即在车辆后退时,通过不踩踏踏板杆20而进行爬行的驾驶,由此消除踏错本身。此外,由于设置有按照用户的意愿来指示锁定状态的解除的锁定解除开关97,因此能够根据需要来解除爬行的驾驶。
285.在本实施方式中,通过主动地控制马达40,由此能够经由踏板杆20向驾驶员传递信息。例如,如图79所示,控制马达40以便对踏板杆20施加至少一次脉冲状的踏力。对于驾驶员来说,如果是单脉冲则能够感知为脉冲信号,如果是连续脉冲则能够感知为振动。
286.此外,如图80所示,在规定的条件成立的情况下,也可以遍及规定时间以上对踏板杆20施加一定的反作用力。在图78中,假设在时刻x41规定的条件成立。规定的条件例如为,在判定为处于燃料消耗率恶化状态的情况下,通过对踏板杆20持续施加一定的反作用力,由此使踏板杆20变重,能够抑制踏板杆20的踏入。
287.在本实施方式中,油门装置100具备马达40、踏板杆20、动力传递机构50以及ecu90。ecu90具备控制马达40的驱动的驱动控制部91以及判定踏板杆的踏错。驱动控制部91在判定为踏板杆20的踏错的情况下,驱动马达40,将踏板杆20进行锁定。由此,能够防止由于踏板杆20的踏错而引起的误起动,安全性提高。
288.此外,ecu90具有驱动控制部91以及判定换挡档位的档位判定部93。驱动控制部91在判定为换挡档位为倒挡的情况下,驱动马达40,将踏板杆20进行锁定。在车辆后退时,通过锁定踏板杆20,能够防止车辆向后方误起动,因此安全性提高。
289.在车辆后退时,油门装置100具备能够手动解除踏板杆20的锁定的锁定解除开关97。由此,能够按照驾驶员的意愿来解除踏板锁定,因此方便性提高。
290.此处,在根据踏错判定、换挡档位来锁定踏板杆20的情况下,只要能够实现锁定功能即可,因此经由动力传递机构50向踏板杆20传递的力的方向无关。
291.驱动控制部91为,在判定为踏板杆20的踏错的情况下,驱动马达40,向踏板杆20的返回方向施加反作用力。即使如此构成,也能够防止由于踏板杆20的踏错而引起的突然起动,因此安全性提高。
292.驱动控制部91控制马达40的驱动,以便施加驾驶员能够感知到的至少一次脉冲状的反作用力。由此,能够经由踏板杆20向驾驶员传递各种信息。
293.驱动控制部91控制马达40,以便在规定时间以上向踏板杆20的返回方向施加一定的反作用力。由此,例如能够提高燃料消耗率。此外,起到与上述实施方式相同的效果。
294.此处,在施加用于踏错、信息传递或者燃料消耗率提高等的反作用力的情况下,动力传递机构50只要能够传递向踏板杆20的关闭方向的力即可,也可以构成为不传递向打开方向的力。与反作用力施加相关的构成也可以与上述实施方式的构成不同。
295.(其他实施方式)
296.在上述实施方式中,驱动源为dc马达。在其他实施方式中,驱动源可以是dc马达以外的种类的马达,例如也可以将螺线管等马达以外的装置用作为驱动源。此外,能够施加反作用力的驱动源也可以为多个。
297.在上述实施方式中,对油门装置是地板式(所谓的“风琴式”)的情况进行了说明。
在其他实施方式中,油门装置也可以是所谓的悬吊式(所谓的“悬垂式”)。此外,动力传递机构、锁定机构也可以构成为与上述实施方式不同。
298.在上述实施方式中,对致动器与油门踏板连接的一体型的情况进行了说明。在其他实施方式中,也可以为致动器与油门踏板不连接而分别与地板连接的分体式。
299.本发明所记载的控制部及其方法可以由专用计算机实现,该专用计算机通过构成被编程为执行由计算机程序具体化的一个或者多个功能的处理器以及存储器来提供。或者,本发明所记载的控制部及其方法可以通过专用计算机实现,该专用计算机通过利用一个以上的专用硬件逻辑电路构成处理器来提供。或者,本发明所记载的控制部及其方法也可以通过一个以上的专用计算机实现,该专用计算机通过由被编程为执行一个或者多个功能的处理器及存储器和一个以上的硬件逻辑电路构成的处理器的组合构成。此外,计算机程序也可以作为由计算机执行的指令,存储在计算机可读取的非临时有形记录介质中。以上,本发明不受上述实施方式任何限定,能够在不脱离其主旨的范围内以各种方式实施。
300.基于实施方式记述了本发明。但应当理解的是,本发明并不限定于该实施方式以及构造。本发明也包含各种变形例、均等范围内的变形。此外,各种组合和方式、甚至是仅包含其中一个要素、其以上或以下的其他组合、方式也落入本发明的范畴、思想范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。