1.本实用新型涉及畜牧行业智能机械技术领域,尤其涉及一种牧场用智能饲喂机器人。
背景技术:
2.目前国内反刍类动物牧场中,根据饲喂动物规模的不同,对于小型牧场,一般采用人工驾驶装载机向tmr饲料制备机中加入粗饲料和精饲料,由tmr制备机对粗饲料进行切割和搅拌,然后将混合好饲料输送到撒料车内,工人再驾驶撒料车进入圈舍,对动物进行饲料的播撒工作。
3.对于大中型牧场,由工人将各种饲草料通过铲车等设备装入移动式的tmr制备机内,由拖拉机pto输出轴为动力驱动tmr制备机中的搅龙转动将饲料进行切割、搅拌和混合,之后工人驾驶拖拉机牵引tmr制备机,进入圈舍撒料饲喂动物;或者使用tmr中央厨房加撒料车模式,tmr中央厨房可以通过自动化控制系统,实现饲料按照配方的自动上料和搅拌,之后员工驾驶撒料车,进入圈舍完成撒料和饲喂工作。
4.但现有牧场的饲喂方式中,无论是tmr搅拌车还是tmr中央厨房形式,都离不开牧场员工的现场操作,不仅工作环境粉尘及气味严重影响工作人员的身体健康影响,而且搅拌切割的过程中没有定刀板的夹持,切割饲料较慢,另外,由于撒料皮带不能双向撒料,导致工作效率低,再者由于人员频繁流动,也会对动物身体健康产生不良影响。
5.另外,圈舍内部需要配备专门的推料设备和人员,在动物进食一段时间后,需及时将出栏的饲料重新推到动物面前,以方便采食,但由于员工推料不及时,常常造成饲料发酵变质,不仅威胁到动物们的身体健康,而且浪费了饲料,增加了饲喂成本,因此急需一种完全代替人工操作的智能化饲喂装置。
技术实现要素:
6.本实用新型公开了一种牧场用智能饲喂机器人,旨在解决现有技术中存在的技术问题。
7.本实用新型采用下述技术方案:
8.一种牧场用智能饲喂机器人,包括安装在行走车轮上部的底盘系统及安装于所述底盘系统上面的料箱装置,所述底盘系统包括呈水平放置的底盘,推料装置安装在所述底盘的下端部,两个激光测距系统安装在所述底盘边缘的对角处,撒料皮带机安装在所述底盘上表面且位于所述料箱装置的前部,智能控制系统安装在所述底盘上表面且位于所述料箱装置的后部,所述智能控制系统上部安装有激光导航系统;其中,
9.所述底盘系统还包括驱动行走车轮运动的电动装置;所述料箱装置包括上端开口的箱体及安装于所述箱体内的饲料加工装置、安装于所述箱体前壁上且与所述撒料皮带机可控制连通的出料门、安装于所述箱体侧壁的定刀板单元,所述箱体底壁安装有重量传感器;且所述智能控制系统与所述电动装置、所述料箱装置、所述撒料皮带机、所述推料装置、
所述激光导航系统、所述激光测距系统及所述定刀板单元均控制连接。
10.在一种实施例中,所述电动装置包括用于驱动车轮行走的行走电机、用于与充电区的充电器匹配连接充电的自动充电刷及配置的手动充电口,其中,所述自动充电刷及手动充电口位于智能饲喂机器人的同一侧。
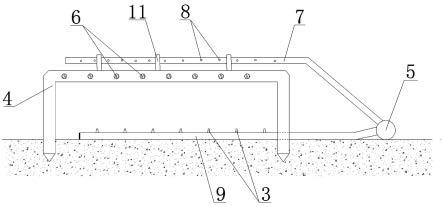
11.在一种实施例中,所述推料装置包括推料板、带动所述推料板移动的驱动单元及防尘单元,所述驱动单元包括连杆及与所述连杆连接的电动缸。
12.在一种实施例中,所述料箱装置还包括:底部安装有重量传感器;所述箱体壁上至少设有一对对称安装的定刀板单元,所述定刀板单元包括可活动进出箱体内腔的定刀板及控制所述定刀板移动的电动缸。
13.在一种实施例中,所述饲料加工装置包括水平旋转的用于搅拌饲料的搅龙及驱动所述搅龙转动的电机,且所述搅龙上分布安装有若干刀板。
14.在一种实施例中,所述撒料皮带机包括撒料皮带、驱动所述撒料皮带的电机及护罩。
15.有益效果:
16.本实用新型公开了一种牧场用智能饲喂机器人,与现有技术相比,本实用新型具有以下优点:
17.通过智能饲喂机器人设有智能控制系统,针对目标圈舍,智能控制料箱装置设有饲料加工装置自动切割、搅拌,由于料箱壁上装有可活动进出箱体内腔的定刀板,在智能控制系统的控制下辅助高效切割草料,大大提高了标准饲料的制作速度,通过设有激光导航系统、激光测距系统,在智能控制系统的控制下智能饲喂机器人能够依据指令精准到达指定目的地,既避免了工人在粉尘环境中工作易患粉尘病的风险,又提高了工作效率高;通过设置能够与料箱相连通的撒料皮带机,且撒料皮带能够切换撒料方向,不需要智能饲喂机器人掉头作业,有效提高了饲喂效率;智能控制系统设有的处理器能够依据目标圈舍的撒料长度信息及撒料重量信息实时调整撒料速度,以实现均匀撒料;通过在智能饲喂机器人的前、后两端均设置推料装置,既不需要调头即可向前或后推料,又能够依据指令及时将出栏饲料推回,方便动物采食,有效避免由于人工推料不及时而造成饲料发酵变质威胁到动物们的身体健康,同时降低了饲喂成本。
附图说明
18.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,构成本实用新型的一部分,本实用新型的示意性实施例及其说明解释本实用新型,并不构成对本实用新型的不当限定;在附图中:
19.图1为本实用新型实施例提供的牧场用智能饲喂机器人技术方案结构示意图;
20.图2为图1的a向视图;
21.图3为图1的b向视图;
22.图4为本实用新型实施例提供的牧场用智能饲喂机器人立体图一;
23.图5为本实用新型实施例提供的牧场用智能饲喂机器人立体图二;
24.图6为本实用新型实施例提供的推料装置技术方案结构示意图。
25.图中:
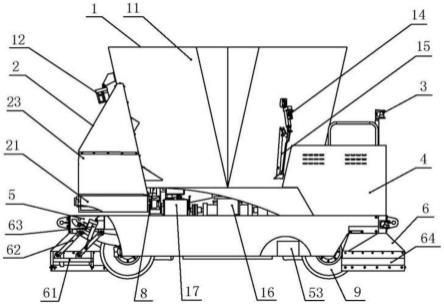
26.料箱装置1;箱体11;出料门电动缸12;出料门13;定刀板电缸14;定刀板15;搅龙传动箱16;搅龙电动机17;搅龙18;刀板19;撒料皮带机2;撒料皮带21;皮带电机22;护罩23;激光导航系统3;智能控制系统4;底盘系统5;自动充电刷51;手动充电口52;行走电机53;底盘54;推料装置6;推料板61;连杆62;电动缸63;防尘罩64;激光测距系统7;重量传感器8;车轮9。
具体实施方式
27.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合本实用新型具体实施例及相应的附图对本实用新型技术方案进行清楚、完整地描述。在本实用新型的描述中,需要说明的是,说明书及权利要求当中所提及的“包含”为一开放式用语,故应解释成“包含但不限定于”;“若干个”指多于2个。在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
28.显然,所描述的实施例仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.如图1-图6所示,本实用新型公开了一种牧场用智能饲喂机器人,包括料箱装置1、撒料皮带机2、激光导航系统3、智能控制系统4、底盘系统5、推料装置6、激光测距系统7、重量传感器8、车轮9。
30.底盘系统5固定安装在车轮9上,底盘系统5设有底盘54及安装在所述底盘54下面的行走电机53,行走电机53连接并驱动车轮9转动并带动智能饲喂机器人移动,行走电机53与智能控制系统4连接,底盘54上还安装有自动充电刷51,所述自动充电刷51与充电区内设置的充电器相匹配,在底盘54的同一侧还安装有手动充电口52。
31.料箱装置1通过紧固件固定安装在底盘54上面,所述料箱装置1包括上端开口的箱体11及安装于所述箱体11底部的饲料加工装置、安装于所述箱体11前壁上的出料门13,在箱体11的底部安装有重量传感器8,料箱装置1通过重量传感器8安装在底盘54上。
32.饲料加工装置包括位于箱体11底部水平旋转的搅龙18,搅龙18底部与搅龙传动箱16连接,搅龙传动箱16由搅龙电动机17驱动,搅龙传动箱16及搅龙电动机17均通过紧固件安装在底盘54上;搅龙18叶片上通过紧固件牢固安装刀板19,刀板19分布安装有若干个;出料门13与出料门电动缸12连接控制,出料门电动缸12通过紧固件安装在箱体11侧壁上,出料门电动缸12与智能控制系统4连接,出料门13开启后里面的标准饲料在搅龙18的搅动下进入到撒料皮带21上,由撒料皮带21传输撒料。
33.所述箱体11壁上对称安装有两个定刀板单元,所述定刀板单元包括可活动进出箱体11内腔的定刀板15及控制所述定刀板15移动的定刀板电缸14,每个定刀板电缸14都由智能控制系统4控制连接。
34.当切割草料时,智能控制系统4控制定刀板15伸出进入箱体1内阻止草料的转动,易于切割,当需要搅拌时,控制定刀板15撤出至箱体壁,易于搅拌。
35.重量传感器8均匀安装在箱体11底部的四个角上,均与智能控制系统4连接,用于依据指令控制饲料与圈舍相匹配。
36.所述底盘54下部的前、后两端均装有推料装置6,所述底盘54的边缘位于相对两侧均固定安装有激光测距系统7;位于所述箱体11的前部安装有与所述出料门13相连通的撒料皮带机2,撒料皮带机2固定安装在所述底盘54上,所述箱体11的后部安装有智能控制系统4,所述智能控制系统4上部安装有激光导航系统3;其中,所述智能控制系统4与所述撒料皮带机2、所述推料装置6、所述激光导航系统3及所述激光测距系统7均控制连接。
37.所述撒料皮带机2包括撒料皮带21及驱动所述撒料皮带21的皮带电机22,所述撒料皮带机2包括安装在外部的护罩23;皮带电机22可依据智能控制系统4的控制进行双向传动。
38.所述推料装置6包括推料板61、带动所述推料板61上下移动的驱动单元及防尘罩64,所述驱动单元包括连杆62及与所述连杆62连接的电动缸63。
39.当依据指令智能控制系统4控制推料板61工作时,控制电动缸63驱动连杆62移动,连杆62拉动推料板61与地面贴合,实施推料过程。
40.具体工作过程:
41.备料过程:
42.智能饲喂机器人设有的智能控制系统4通过通信模块获取饲喂指定,指令包括预饲喂圈舍的信息,智能控制系统4控制行走电机53驱动智能饲喂机器人前往,在激光导航系统3及激光测距系统7的指引下进入中央物料库,依次进入指定位置,同时,中央物料库的控制室依据指令中圈舍的编码及预设的配料信息,分别控制指定的各储料仓按照预设的出料顺序、出料量及出料时间出料至智能饲喂机器人的料箱装置1设有的上端开口的箱体11中。
43.箱体11在接料完成后,智能控制系统4控制行走电机53驱动智能饲喂机器人前往预设的圈舍,并获取激光导航系统3发射的导航信息指引,同时,智能控制系统4控制搅龙电动机17工作,通过搅龙传动箱16传递动力至搅龙18旋转工作,将混合的饲料原料搅拌、切割,当饲料加工初期,刀板19对饲料原料中的草料进行切割时,智能控制系统4控制定刀板电缸14启动,定刀板电缸14控制的定刀板15伸出至箱体11内,由于定刀板15阻止草料的转动,使得草料易于切断,当搅龙18旋转的时间到达预设时间时,草料已被加工为较细短,此时,控制定刀板15撤出箱体11至箱体壁,使得切割后的饲料易于被搅拌充分。
44.在搅拌过程中,智能控制系统4控制行走电机53驱动车轮9转动,智能饲喂机器人到达圈舍的指定撒料开始位置,当形成预设重量的标准饲料时,开启撒料过程。
45.撒料过程:
46.智能饲喂机器人依据获取的撒料重量及所述圈舍的撒料长度,自动计算运行速度,并实时调整智能饲喂机器人的撒料速度和撒料量。
47.智能饲喂机器人在激光导航系统3及激光测距系统7的导航指引沿预审路线行走,智能控制系统4控制箱体11上的出料门电动缸12,出料门电动缸12控制出料门13开启,标准饲料流程至撒料皮带机2的皮带电机22;与此同时,控制撒料皮带机2的皮带电机22带动撒料皮带21旋转撒料,撒料皮带21依据指定的撒料方向旋转,实施撒料,例如,撒料皮带21依据要求向右侧传动,实施右侧撒料,当智能控制系统4控制向左侧撒料时,控制皮带电机22驱动撒料皮带21向左侧传动,实施向左侧撒料,不需要智能饲喂机器人调头转向即可实现
针对两侧围栏的任一侧撒料。智能控制系统4将智能饲喂机器人撒料信息实时通信发送至控制中心,完成预设圈舍的撒料工作。
48.智能饲喂机器人撒料工作完成后,依据指令,在激光导航系统3的辅助下进入充电区,到达指定位置后自动充电刷51与充电区设置的充电器匹配后自行充电并等待下一个工作指令。
49.推料过程:
50.当饲喂一段时间后,部分饲料会被牛羊等动物拱出围栏,为方便动物采食,有效避免由于推料不及时而造成饲料发酵变质威胁到动物们的身体健康,而且有效避免了浪费饲料,需及时将出栏饲料推回。
51.控制中心发布推料指令至正在充电区充电等待指令的智能饲喂机器人,智能控制系统4获取推料指令,所述推料指令包括所述圈舍的编码;智能饲喂机器人依据所述圈舍的编码信息,设有的智能控制系统4控制位于底盘54的行走电机53驱动车轮9转动,智能饲喂机器人前往,获取激光导航系统3及激光测距系统7发射的导航信息,进入指定圈舍的推料起始位置,当获取向前推料的信息时,智能饲喂机器人前行,且智能控制系统4控制前方推料装置6设置的电动缸63工作,电动缸63控制连杆62移动,带动推料板61从防尘罩64中落下,与地面接触,智能饲喂机器人沿预设路线前行时,推料板61向饲喂围栏处推动草料,推料完成后,所述智能控制系统4控制所述推料板61回位。
52.完成推料工作后,则智能饲喂机器人执行指令,在激光导航系统3、激光测距系统7的辅助导航下进入充电区,到达指定位置后自动充电刷51与充电区设置的充电器匹配后自行充电并等待下一个工作指令。
53.需要说明的是,当智能饲喂机器人工作过程电量不足时,智能控制系统4控制智能饲喂机器人在激光导航系统3、激光测距系统7的辅助导航下进入充电区自动充电,当电量达到预设目标时,控制智能饲喂机器人在激光导航系统3、激光测距系统7的辅助导航下到达原工作位置,使智能饲喂机器人继续工作。当智能饲喂机器人无电时,需要人工通过手动充电口52充电。
54.上面结合附图对本实用新型的实施例进行了描述,但是本实用新型并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本实用新型的启示下,在不脱离本实用新型宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本实用新型的保护之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。