技术特征:
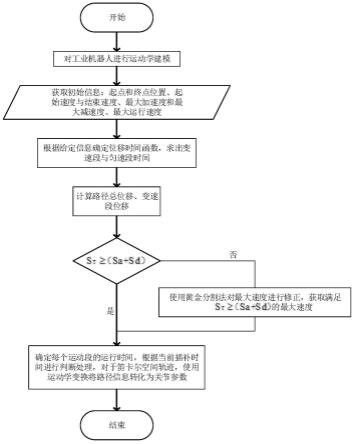
1.一种工业机器人的柔顺加减速控制方法,其特征在于,所述工业机器人的柔顺加减速控制方法,包括:s1、对工业机器人使用d-h参数法进行运动学建模,确定工业机器人的运动学正逆解公式;s2、获取运动的起点位置和终点位置,以及工业机器人的起始速度v
s
、终点速度v
e
、最大加速度acc、最大减速度dec以及最大运行速度v
m
;s3、将整个运动段分为变速段和匀速段,其中变速段包括加速段和减速段,拟合加速段和减速段的位移时间函数,包括:s3.1、利用二次多项式的抛物线特性对加速段和减速段的加速度曲线进行拟合,通过积分得出加速度曲线对应的位移时间函数如下:s(t)=a0 a1t a2t2 a3t3 a4t4式中,s(t)为t时刻的位移,a0,a1,a2,a3,a4为四次多项式的系数;s3.2、确定加速段的位移时间函数,根据给定条件:起始速度v
s
、最大加速度acc、最大运行速度v
m
,以及加速度约束条件a(0)=a(t
a
)=0,a(max)=acc,s(0)=0,求出加速段的总时间t
a
,以及系数如下:进而得到加速段的位移时间函数表达式s
a
(t)如下:其中t∈[0,t
a
]式中,a
a0
,a
a1
,a
a2
,a
a3
,a
a4
为加速段的位移时间函数的系数,a(0)为加速段起始时刻的加速度,a(t
a
)为加速度t
a
时刻的加速度,a(max)为加速段的最大加速度,s(0)为加速度起始时刻的位移;s3.3、确定减速段的位移时间函数,根据给定条件:减速时速度v
m
、最大减速度dec、终点速度v
e
以及加速度约束条件a(0)
′
=a(t
d
)=0,a(max)
′
=-dec,s(0)
′
=0,求出减速段的总时间t
d
,以及系数如下:进而得到减速段的位移时间函数表达式s
d
(t):
其中t∈[0,t
d
]式中,a
d0
,a
d1
,a
d2
,a
d3
,a
d4
为减速段的位移时间函数的系数,a(0)
′
为减速段起始时刻的加速度,a(t
d
)为减速度t
d
时刻的加速度,a(max)
′
为减速段的最大加速度,s(0)
′
为减速度起始时刻的位移;s4、根据加速段的总时间t
a
、减速段的总时间t
d
、加速段的位移时间函数表达式s
a
(t)和减速段的位移时间函数表达式s
d
(t),计算得到加速段的位移长度s
a
和减速段的位移长度s
d
;s5、根据加速段的位移长度s
a
、减速段的位移长度s
d
以及运动段的总长s
t
判断是否包含匀速段,若不包含匀速段则更新最大运行速度v
m
;s6、固定插补周期,得到每个插补周期内的位移量,基于位移量利用运动学逆解公式得到工业机器人的控制量,完成的工业机器人的加减速控制。2.如权利要求1所述的工业机器人的柔顺加减速控制方法,其特征在于,所述运动段的总长s
t
计算如下:在直线轨迹中,使用来计算总位移长度,其中(x
s
,y
s
,z
s
)、(x
e
,y
e
,z
e
)为起点位置和终点位置在基坐标系下的坐标;在圆弧轨迹中,使用极坐标方程来表示圆弧轨迹,即在圆弧坐标系下有:其中x,y为圆弧坐标系下坐标,r为圆弧半径,θ为圆弧的角度,取s
t
为极角的变化,有:s
t
=θ
s-θ
e
式中,θ
s
为起点位置在圆弧坐标系下的极角,θ
e
为终点位置在圆弧坐标系下的极角。3.如权利要求1所述的工业机器人的柔顺加减速控制方法,其特征在于,所述根据加速段的位移长度s
a
、减速段的位移长度s
d
以及运动段的总长s
t
判断是否包含匀速段,包括:若s
t
>(s
a
s
d
),则运动段中包含匀速段,所加匀速段的速度为加速段结束时的速度,即最大运行速度v
m
,匀速段运行时间为t
v
=(s
t-(s
a
s
d
))/v
m
;若s
t
=(s
a
s
d
),则运动段中不包含匀速段,在最大运行速度v
m
下经过加速段和减速段后到达目标点,匀速段运行时间为t
v
=0;若s
t
<(s
a
s
d
),则运动段中不包含匀速段,更新最大运行速度v
m
得到更新后的最大运行速度v
m
′
使得s
t
≥(s
a
′
s
d
′
),s
a
′
为最大运行速度v
m
′
下加速段的位移长度,s
d
′
为最大运行速度v
m
′
下减速段的位移长度。4.如权利要求3所述的工业机器人的柔顺加减速控制方法,其特征在于,所述,更新最大运行速度v
m
得到更新后的最大运行速度v
m
′
使得s
t
≥(s
a
′
s
d
′
),包括:s5.1、确定速度搜索区间为[v
s
,v
m
],以及确定最后区间的精度δ,使得s
t-(s
a
′
s
d
′
)<δ;s5.2、计算插入的两个黄金分割点的值,使这两个点的速度v1、v2能够满足:
s5.3、比较以v1、v2中较大的速度为最大运行速度时的变速段的位移长度s
a2
、s
d2
与运动段的总长s
t
的关系,如果s
t
<(s
a2
s
d2
),则跳到步骤s5.4;如果s
t
≥(s
a2
s
d2
),则跳到步骤s5.5;s5.4、缩小速度搜索空间,将速度搜索空间缩小至[v
s
,v2],计算新的黄金分割点v1′
:v1′
=v
s
0.328
·
(v
2-v
s
)令v
m
=v2,v2=v1,v1=v1′
,跳到步骤s5.3继续执行;s5.5、计算变速段的位移长度,如果以v2为最大运行速度时s
t-(s
a2
s
d2
)≤δ,则v2即为修正后的最大运行速度v
m
′
,结束迭代,跳转到步骤s5.6;否则缩小搜索空间,将速度搜索空间缩小至[v1,v
m
],计算新的黄金分割点v2′
:v2′
=v1 0.618
·
(v
m-v1)令v
s
=v1,v1=v2,v2=v2′
,跳到步骤s5.3继续执行;s5.6、更新最大运行速度修正后的加速段和减速段的位移时间函数表达式,计算最大运行速度修正后的变速段的位移长度s
a
′
、s
d
′
,以及修正后的匀速段运行时间t
v
=(s
t-(s
a
′
s
d
′
))/v
m
′
。
技术总结
本发明公开了一种工业机器人的柔顺加减速控制方法,包括:确定工业机器人的运动学正逆解公式;获取运动的起点位置和终点位置,以及机器人运动参数;拟合加速段和减速段的位移时间函数;计算加速段的位移长度和减速段的位移长度;根据加速段的位移长度、减速段的位移长度以及运动段的总长判断是否包含匀速段,若不包含匀速段则更新最大运行速度;固定插补周期,得到每个插补周期内的位移量,基于位移量利用运动学逆解公式得到工业机器人的控制量,完成对工业机器人的加减速控制。本发明对不同轨迹具有自适应调节最大速度功能,计算简单,稳定可靠。解决了传统加减速算法加速度、加加速度不平滑的问题。速度不平滑的问题。速度不平滑的问题。
技术研发人员:董辉 王奎 方芳 陈积明 俞立 鄢鹏飞
受保护的技术使用者:浙江工业大学
技术研发日:2022.09.02
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。