技术特征:
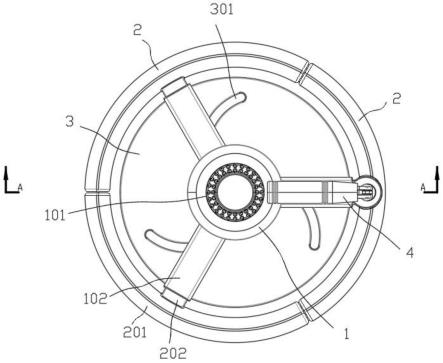
1.一种用于密集架的可任意变径转轮,其特征在于,包括:一y形架(1),包括一中心筒(101)和多个支臂(102),支臂(102)圆周阵列在中心筒(101)上,支臂(102)内部为空腔,底部设置滑槽(103),与支臂数量一致的弧臂(2),任意的弧臂(2)包括连接的弧杆部(201)和直柄部(202),直柄部(202)内置于支臂(102)的空腔内,直柄部(202)底部连接有一推杆部(203),推杆部(203)外露于滑槽(103);一转盘(3),同轴套设在中心筒(101)外,其上圆周阵列设置有贯通的弧槽(301),所述推杆部(203)穿过弧槽(301);一把手(4),连接在弧臂(2)上;一支臂(102)内壁设置有突出的导向凸(104),一弧臂(2)配合在导向凸(104)上,导向凸(104)与滑槽(103)之间存在间隔(105);所述支臂(102)底部设置有朝向滑槽(103)的卡齿(106);推杆部(203)上套设有两转筒(5),两转筒(5)内设置有一套设在推杆部(203)外的扭簧(7),两转筒(5)上均设置有定位孔(501),扭簧(7)的两自由端分别配合在定位孔(501)内;两转筒(5)外壁一体设置有凸起的卡勾部(502),卡勾部(502)可与卡齿(106)卡合或脱离接触。2.根据权利要求1所述的可任意变径转轮,其特征在于:两转筒(5)通过卡簧(6)固定在推杆部(203)上。3.根据权利要求1所述的可任意变径转轮,其特征在于:两卡勾部(502)上均连接有一第一连杆(8),两第一连杆(8)端部枢接于同一第一枢轴(9),两第一连杆(8)上分别枢接有第二连杆(10),两第二连杆(10)枢接于同一第二枢轴(11);所述的第一连杆(8)、第一枢轴(9)、第二连杆(10)和第二枢轴(11)构成一菱形结构;第一枢轴(9)或第二枢轴(11)连接有一拉线(12)。4.根据权利要求3所述的可任意变径转轮,其特征在于:所述拉线(12)连接在第二枢轴(11)上,第一枢轴(9)上设置有一贯通孔,拉线(12)穿过此贯通孔。5.根据权利要求4所述的可任意变径转轮,其特征在于:所述卡齿(106)的倾斜方向与拉线的拉力方向成钝角。6.根据权利要求4所述的可任意变径转轮,其特征在于:所述弧臂(2)在弧杆部(201)和直柄部(202)的连接处设置有一安装槽(204),弧杆部(201)上设置有连通至安装槽(204)的通槽(205),通槽(205)处配合有一活动杆(13);弧臂(2)上固定连接有支架(14),所述把手(4)通过枢轴(15)枢接在此支架(14)上,把手(4)端部设置为弧面的压头部(401);所述活动杆(13)上连接有压板部(131),压板部(131)与弧杆部(201)之间设置有套设在活动杆(13)上的第一弹簧(16);所述安装槽(204)内置有一活动块(17),所述活动块(17)与一贯穿弧杆部(201)的卡销(18)连接,所述活动块(17)上设置有贯通的活动槽(171);所述活动杆(13)底部设置有楔形的楔头部(132),活动槽(171)内壁设置有与楔头部(132)面接触的斜面(172),当活动杆(13)下移时,推动活动块(17)朝向远离推杆部(203)的方向动作;所述卡销(18)上套设有第二弹簧(19),第二弹簧(19)压紧在活动块(17)与安装槽(204)内壁之间;所述活动块(17)的底部一体连接有卷线杆(173),所述拉线(12)连接在此卷线杆(173)上。7.根据权利要求6所述的可任意变径转轮,其特征在于:所述活动块(17)异于连接卡销(18)的一侧设置有定位凸(174),直柄部(202)上设置有连通安装槽(204)的定位槽(206),
所述定位凸(174)与定位槽(206)配合。8.根据权利要求6所述的可任意变径转轮,其特征在于:所述支架(14)上固定设置有与枢轴(15)同轴的止位块(141),止位块(141)存在一活动缺(142),所述枢轴(15)的一端设置有径向突出的止位凸(151),止位凸(151)位于活动缺(142)内,所述枢轴(15)与把手(4)无转动连接。
技术总结
一种用于密集架的可任意变径转轮,包括:一Y形架,包括一中心筒和多个支臂,支臂圆周阵列在中心筒上,支臂内部为空腔,底部设置滑槽,与支臂数量一致的弧臂,任意的弧臂包括连接的弧杆部和直柄部,直柄部内置于支臂的空腔内,直柄部底部连接有一推杆部,推杆部外露于滑槽;一转盘,同轴套设在中心筒外,其上圆周阵列设置有贯通的弧槽,所述推杆部穿过弧槽;一把手,连接在弧臂上,通过控制把手的折叠状态即可控制转轮直径是否允许被调节。本发明的把手作为转动受力部件的同时控制当前直径恒定,而调节直径时,只需调节任意一个弧臂即可联动所有弧臂同步且同幅度动作。有弧臂同步且同幅度动作。有弧臂同步且同幅度动作。
技术研发人员:张文渟 杨武 谢志新
受保护的技术使用者:江西金虎保险设备集团有限公司
技术研发日:2022.07.18
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。