1.本发明涉及机器人机械疲劳测试技术领域,特别是涉及一种机器人机械疲劳测试系统及方法。
背景技术:
2.传统的机械疲劳测试的方法都是给机械人的运动关节处设置传感器,通过在采集周期内采集各个关节的受力力矩或者机械手臂的移动距离的变化来反映出机械手臂的疲劳测试,而这些需要测试大量的数据才能得出结果。
3.由于在测试过程中机器人的机械运动都是往复式运动的,在往复式运动的两个拐点,实际上在拐点是一个弧形运动的拐点,机械运动过程中,其在拐点的弧形运动由于机械疲劳会使得拐点处的弧形发生变化,弧度变小,可以基于捕捉弧度来测试机器人机械疲劳。
技术实现要素:
4.有鉴于此,本发明的主要目的在于提供一种机器人机械疲劳测试系统及方法。本发明采用的技术方案如下:
5.机器人机械疲劳测试系统,包括:
6.设置一用于机械臂运动限位的机械夹具;
7.在机械夹具的内侧面分别设置有传感器矩阵;
8.控制装置,用于设置机械臂运动行程,并限定在机械夹具之间进行往复运动,在往复运动过程中,所述机械臂作用于传感器矩阵上;
9.所述传感器矩阵,具有多个传感点位,每一传感点位形成一个独立的传感信号,当所述机械臂作用于传感器矩阵上时,不同的传感点位由于受到的机械臂作用力的不平衡形成多个传感信号,并将所述传感信号基于位置编码同步传递至处理装置,由处理装置设置的多个处理单元将对应的传感点位的每一周期的传感信号转化为模拟信号,并获取每一周期内模拟信号的每一尖峰值,记录所述尖峰值并以尖峰值所表示的数字量来代表机械臂一个回程周期对传感器矩阵的作用力,将相邻周期的作用力按照对应的数字量进行比对,以查看相邻两个周期内同一传感信号所对应的数字量是否一致,以及是否有新的传感点位的传感信号接入和原有的传感点位的传感信号消失,以获取机器人机械疲劳结果。
10.进一步地,所述处理装置具有:
11.处理矩阵,所述处理矩阵包括多个处理单元,所述处理单元依据所述编码与传感点位形成对应的连接,所述处理单元用于将每一周期的传感信号转化为模拟信号,并获取每一周期内模拟信号的每一尖峰值,记录所述尖峰值并以尖峰值所表示的数字量来代表机械臂一个回程周期对传感器矩阵的作用力;
12.监测单元,用于监测每一处理单元的信号接入,并记录具有传感信号接入的处理单元,以此将具有传感信号接入的处理单元所形成的作用力按照编码输出;
13.存储单元,用于连接所述监测单元,基于时钟时序将监测单元输出的作用力进行
存储;
14.对比单元,用于从所述存储单元中加载所述作用力并将相邻周期的作用力按照对应的数字量进行比对,以查看相邻两个周期内同一传感信号所对应的数字量是否一致,以及是否有新的传感点位的传感信号接入和原有的传感点位的传感信号消失;
15.判断单元,用于基于比对单元的比对结果来获取机器人机械疲劳结果。
16.进一步地,所述传感器矩阵包括:
17.贴片,固定在机械夹具的内侧面,
18.在贴片上设置有多个均匀排列的传感点位;
19.每一传感点位处均设置有一压力传感器;
20.控制部,其内设置有逻辑单元和控制单元,
21.所述逻辑单元用于连接于每一压力传感器,用于设定每一压力传感器的信号接入逻辑;
22.控制单元,基于所述信号接入逻辑当所述机械臂作用于传感器矩阵上时,不同的传感点位由于受到的机械臂作用力的不平衡形成多个传感信号在控制单元的控制下按照所述信号接入逻辑中的编码进行输出。
23.进一步地,所述控制装置用于连接至机器人内部的控制器,基于控制装置设置机械臂运动行程参数,并将机械臂运动行程参数由控制装置输入至控制器,并通过所述控制器控制机械臂运动行程,并限定在机械夹具之间进行往复运动。
24.进一步地,所述控制装置具有:
25.输入模块,该输入模块为软键盘或者键盘,用于输入机械臂运动行程参数;
26.输入控制单元,用于连接软键盘或者键盘用于基于软键盘或者键盘的信号输出来形成控制指令,所述控制指令中包含了机械臂运动行程参数,
27.控制接口,与所述控制器上的通信接口经数据线连接,用于基于控制指令将机械臂运动行程参数写入所述控制器。
28.进一步地,所述处理矩阵具有n行和m列,其中,n≥2,m≥2。
29.进一步地,所述监测单元具有:
30.监测逻辑部,用于与处理矩阵内设置的逻辑单元连接,基于逻辑单元来获取
31.每一压力传感器的信号接入逻辑;
32.记录部,用于记录具有传感信号接入的处理单元的编码;
33.输出部,用于将具有传感信号接入的处理单元所形成的作用力按照编码输出。
34.本发明还提供了一种机器人机械疲劳测试方法,包括如下步骤:
35.基于控制装置的输入模块输入机械臂运动行程参数至机器人的控制器;
36.控制器接收到机械臂运动行程参数以控制机械臂运动行程,并限定在机械夹具之间进行往复运动;
37.在往复运动过程中,所述机械臂作用于传感器矩阵上,传感器矩阵的每一传感点位形成一个独立的传感信号,当所述机械臂作用于传感器矩阵上时,不同的传感点位由于受到的机械臂作用力的不平衡形成多个传感信号,并将所述传感信号基于位置编码同步传递至处理装置,由处理装置设置的多个处理单元将对应的传感点位的每一周期的传感信号转化为模拟信号,并获取每一周期内模拟信号的每一尖峰值,记录所述尖峰值并以尖峰值
所表示的数字量来代表机械臂一个回程周期对传感器矩阵的作用力,将相邻周期的作用力按照对应的数字量进行比对,以查看相邻两个周期内同一传感信号所对应的数字量是否一致,以及是否有新的传感点位的传感信号接入和原有的传感点位的传感信号消失,以获取机器人机械疲劳结果。
38.进一步地,所述处理矩阵包括多个处理单元,所述处理单元依据所述编码与传感点位形成对应的连接,所述处理单元用于将每一周期的传感信号转化为模拟信号,并获取每一周期内模拟信号的每一尖峰值,记录所述尖峰值并以尖峰值所表示的数字量来代表机械臂一个回程周期对传感器矩阵的作用力;
39.监测单元用于监测每一处理单元的信号接入,并记录具有传感信号接入的处理单元,以此将具有传感信号接入的处理单元所形成的作用力按照编码输出;
40.存储单元用于连接所述监测单元,基于时钟时序将监测单元输出的作用力进行存储;
41.对比单元用于从所述存储单元中加载所述作用力并将相邻周期的作用力按照对应的数字量进行比对,以查看相邻两个周期内同一传感信号所对应的数字量是否一致,以及是否有新的传感点位的传感信号接入和原有的传感点位的传感信号消失;
42.判断单元用于基于比对单元的比对结果来获取机器人机械疲劳结果。
43.本发明通过采用传感器矩阵来捕获机械臂在往复运动的拐点处的多个压力信号,从而获取机械臂在拐点位置的作用力的变化,基于作用力的变化就能反应出机械手臂的疲劳测试结果。该方法可以短周期内就能识别机械手臂的疲劳测试结果。
附图说明
44.以下附图仅对本发明作示意性的说明和解释,并不用于限定本发明的范围,其中:
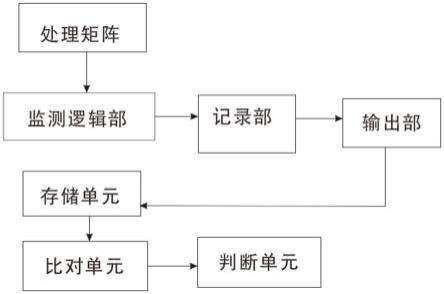
45.图1为本发明处理装置的框架原理图;
46.图2为本发明的结构原理图;
47.图3为本发明中机械手臂的运动行程示意图。
具体实施方式
48.为了使本发明的目的、技术方案、设计方法及优点更加清楚明了,以下结合附图通过具体实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限定本发明。
49.参照图1至图3,本发明提供了机器人机械疲劳测试系统,包括:
50.设置一用于机械臂运动限位的机械夹具;
51.在机械夹具的内侧面分别设置有传感器矩阵;
52.控制装置,用于设置机械臂运动行程,并限定在机械夹具之间进行往复运动,在往复运动过程中,所述机械臂作用于传感器矩阵上;
53.所述传感器矩阵,具有多个传感点位,每一传感点位形成一个独立的传感信号,当所述机械臂作用于传感器矩阵上时,不同的传感点位由于受到的机械臂作用力的不平衡形成多个传感信号,并将所述传感信号基于位置编码同步传递至处理装置,由处理装置设置的多个处理单元将对应的传感点位的每一周期的传感信号转化为模拟信号,并获取每一周
期内模拟信号的每一尖峰值,记录所述尖峰值并以尖峰值所表示的数字量来代表机械臂一个回程周期对传感器矩阵的作用力,将相邻周期的作用力按照对应的数字量进行比对,以查看相邻两个周期内同一传感信号所对应的数字量是否一致,以及是否有新的传感点位的传感信号接入和原有的传感点位的传感信号消失,以获取机器人机械疲劳结果。
54.进一步地,所述处理装置具有:
55.处理矩阵,所述处理矩阵包括多个处理单元,所述处理单元依据所述编码与传感点位形成对应的连接,所述处理单元用于将每一周期的传感信号转化为模拟信号,并获取每一周期内模拟信号的每一尖峰值,记录所述尖峰值并以尖峰值所表示的数字量来代表机械臂一个回程周期对传感器矩阵的作用力;
56.监测单元,用于监测每一处理单元的信号接入,并记录具有传感信号接入的处理单元,以此将具有传感信号接入的处理单元所形成的作用力按照编码输出;
57.存储单元,用于连接所述监测单元,基于时钟时序将监测单元输出的作用力进行存储;
58.对比单元,用于从所述存储单元中加载所述作用力并将相邻周期的作用力按照对应的数字量进行比对,以查看相邻两个周期内同一传感信号所对应的数字量是否一致,以及是否有新的传感点位的传感信号接入和原有的传感点位的传感信号消失;
59.判断单元,用于基于比对单元的比对结果来获取机器人机械疲劳结果。
60.进一步地,所述传感器矩阵包括:
61.贴片,固定在机械夹具的内侧面,
62.在贴片上设置有多个均匀排列的传感点位;
63.每一传感点位处均设置有一压力传感器;
64.控制部,其内设置有逻辑单元和控制单元,
65.所述逻辑单元用于连接于每一压力传感器,用于设定每一压力传感器的信号接入逻辑;
66.控制单元,基于所述信号接入逻辑当所述机械臂作用于传感器矩阵上时,不同的传感点位由于受到的机械臂作用力的不平衡形成多个传感信号在控制单元的控制下按照所述信号接入逻辑中的编码进行输出。
67.进一步地,所述控制装置用于连接至机器人内部的控制器,基于控制装置设置机械臂运动行程参数,并将机械臂运动行程参数由控制装置输入至控制器,并通过所述控制器控制机械臂运动行程,并限定在机械夹具之间进行往复运动。
68.进一步地,所述控制装置具有:
69.输入模块,该输入模块为软键盘或者键盘,用于输入机械臂运动行程参数;
70.输入控制单元,用于连接软键盘或者键盘用于基于软键盘或者键盘的信号输出来形成控制指令,所述控制指令中包含了机械臂运动行程参数,
71.控制接口,与所述控制器上的通信接口经数据线连接,用于基于控制指令将机械臂运动行程参数写入所述控制器。
72.进一步地,所述处理矩阵具有n行和m列,其中,n≥2,m≥2。
73.进一步地,所述监测单元具有:
74.监测逻辑部,用于与处理矩阵内设置的逻辑单元连接,基于逻辑单元来获取
75.每一压力传感器的信号接入逻辑;
76.记录部,用于记录具有传感信号接入的处理单元的编码;
77.输出部,用于将具有传感信号接入的处理单元所形成的作用力按照编码输出。
78.本发明还提供了一种机器人机械疲劳测试方法,包括如下步骤:
79.基于控制装置的输入模块输入机械臂运动行程参数至机器人的控制器;
80.控制器接收到机械臂运动行程参数以控制机械臂运动行程,并限定在机械夹具之间进行往复运动;
81.在往复运动过程中,所述机械臂作用于传感器矩阵上,传感器矩阵的每一传感点位形成一个独立的传感信号,当所述机械臂作用于传感器矩阵上时,不同的传感点位由于受到的机械臂作用力的不平衡形成多个传感信号,并将所述传感信号基于位置编码同步传递至处理装置,由处理装置设置的多个处理单元将对应的传感点位的每一周期的传感信号转化为模拟信号,并获取每一周期内模拟信号的每一尖峰值,记录所述尖峰值并以尖峰值所表示的数字量来代表机械臂一个回程周期对传感器矩阵的作用力,将相邻周期的作用力按照对应的数字量进行比对,以查看相邻两个周期内同一传感信号所对应的数字量是否一致,以及是否有新的传感点位的传感信号接入和原有的传感点位的传感信号消失,以获取机器人机械疲劳结果。
82.进一步地,所述处理矩阵包括多个处理单元,所述处理单元依据所述编码与传感点位形成对应的连接,所述处理单元用于将每一周期的传感信号转化为模拟信号,并获取每一周期内模拟信号的每一尖峰值,记录所述尖峰值并以尖峰值所表示的数字量来代表机械臂一个回程周期对传感器矩阵的作用力;
83.监测单元用于监测每一处理单元的信号接入,并记录具有传感信号接入的处理单元,以此将具有传感信号接入的处理单元所形成的作用力按照编码输出;
84.存储单元用于连接所述监测单元,基于时钟时序将监测单元输出的作用力进行存储;
85.对比单元用于从所述存储单元中加载所述作用力并将相邻周期的作用力按照对应的数字量进行比对,以查看相邻两个周期内同一传感信号所对应的数字量是否一致,以及是否有新的传感点位的传感信号接入和原有的传感点位的传感信号消失;
86.判断单元用于基于比对单元的比对结果来获取机器人机械疲劳结果。
87.本发明的原理如下:
88.本发明通过设定机械手臂的运动行程,并在运动行程的两个拐点位置设置有传感器矩阵,所述传感器矩阵具有多个传感点位,多个传感点位能够有效的获取机械手臂在运动回程或者起始时拐点位置对多个传感点位行程压力,由于拐点位置是一个弧形的运动,因此机械手臂在拐点对传感器矩阵上的每一传感点位的作用力具有差异,因此对每一传感点位的作用力是不平衡的,为了匹配机械手臂在运动回程或者起始时所具有的弧形运动,贴片设置成弧形,当传感器矩阵的每一传感点位受到压力后形成一个独立的传感信号,当所述机械臂作用于传感器矩阵上时,不同的传感点位由于受到的机械臂作用力的不平衡形成多个传感信号,并将所述传感信号基于位置编码同步传递至处理装置,由处理装置设置的多个处理单元将对应的传感点位的每一周期的传感信号转化为模拟信号,并获取每一周期内模拟信号的每一尖峰值,记录所述尖峰值并以尖峰值所表示的数字量来代表机械臂一
个回程周期对传感器矩阵的作用力,将相邻周期的作用力按照对应的数字量进行比对,以查看相邻两个周期内同一传感信号所对应的数字量是否一致,以及是否有新的传感点位的传感信号接入和原有的传感点位的传感信号消失,以获取机器人机械疲劳结果。
89.在上述中,机械手臂可以换成脚部、腿部等任意一可以运行的机构。
90.以上已经描述了本发明的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。