1.本实用新型涉及无人机技术领域,具体涉及一种无人机全自动机巢。
背景技术:
2.无人机发展迅速,广泛应用于基础建设规划、线路巡查、应急响应、地形测量等多个领域。在野外作业中,无人机需要通过无人机机巢进行安置和充电,但无人机的停泊点还做不到十分精确,使得自动充电功能还不完善。
3.在充电时,无人机必须置于机巢中间便于带动充电座的按路线运动并进行接触插接充电,因此,如此规划设计一种具有自动归中充电功能的机构是本领域人员所急需解决的技术问题。
技术实现要素:
4.为了克服无人机的停泊点不精确,自动充电功能不完善的缺点,技术问题:提供一种具有自动归中充电功能的无人机全自动机巢。
5.技术方案如下:一种无人机全自动机巢,包括有机巢舱,机巢舱顶部两侧均安装有滑轨组件;舱盖,滑轨组件上安装有舱盖,舱盖通过滑轨组件的相对滑动以打开或关闭机巢口;升降装置,机巢舱底部一侧设置有升降装置;停机坪,升降装置的升降悬臂顶部设置有停机坪;归中充电机构,停机坪的四周侧板均开有滑槽,停机坪上安装有归中充电机构;归中充电机构包括横向归中杆和纵向归中杆,停机坪四周侧板的滑槽内分别滑动式设置有两两组合的横向归中杆和纵向归中杆;螺母套,横向归中杆和纵向归中杆的末端均设置有螺母套;丝杆,停机坪底部四周边缘处均通过轴承座安装有丝杆,丝杆与螺母套滑动配合传动,相对方向的两根丝杆通过同步带轮组件传动连接;步进电机,停机坪底部靠近轴承座处设置有步进电机,步进电机通过减速机与丝杆传动连接;感应开关,停机坪底部靠近螺母套处间隔设置有若干感应开关。
6.进一步说明,所述感应开关布置有2个以上并间隔设置在螺母套运动路线上;所述感应开关通过感应螺母套是否到达指定位置,以此控制归中杆自动暂停或开始运动。
7.进一步说明,还包括有充电座,纵向归中杆顶部中间安装有充电座;充电插孔,飞行器支脚上与充电座平齐处安装有充电插孔,充电座与充电插孔配合接插充电。
8.进一步说明,还包括有舱盖传感器,机巢内壳上部靠近舱盖处间隔分布有若干舱门传感器;所述舱盖传感器用于检测舱盖是否呈完全打开的状态。
9.本实用新型的有益效果为:1、归中充电机构采用步进电机、同步带轮组件驱动丝杆来实现相对方向的横向/纵向归中杆的同步并拢运动,推动无人机的支脚架进而带动无人机整体向停机坪的中心进行移动完成横/纵方向上的同步归中动作。
10.2、当感应开关通过感应螺母套到达某个指定位置时发出电信号,电器控制柜以此电信号判断并通过电机控制归中杆自动暂停或开始运动。进一步提高了定位精度,避免无人机降落后位置有偏差无法充电的情况,有效提升了无人机机巢的稳定性和可靠性。
11.3、两个对称设置的舱盖可在舱盖传感器的感应下,并通过滑轨组件的相对滑动以打开或关闭机巢口,使机巢的正上方呈完全打开的状态,避免妨碍无人机的降落或起飞时产生碰撞等问题。
附图说明
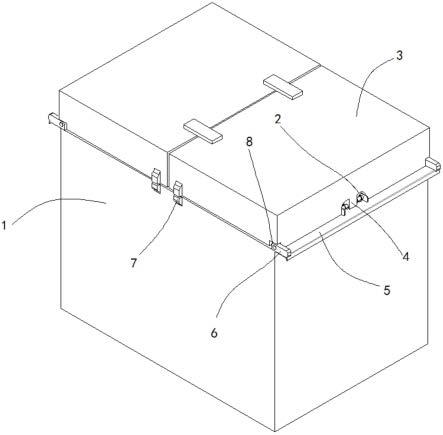
12.图1为本实用新型立体结构示意图。
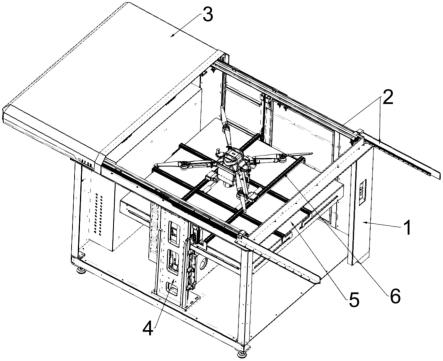
13.图2为本实用新型中升降装置的立体结构示意图。
14.图3为本实用新型中归中充电机构的立体结构示意图。
15.图4为本实用新型中归中充电机构的立体结构示意图。
16.图5为本实用新型中无人机充电状态的示意图。
17.图6为本实用新型中充电座与充电插孔的分离状态示意图。
18.附图中的标记:1:机巢舱,2:滑轨组件,3:舱盖,4:升降装置,5:停机坪,501:滑槽,6:归中充电机构,61:横向归中杆,62:纵向归中杆,63:螺母套,64:丝杆,65:步进电机,66:感应开关,7:充电座,8:充电插孔。
具体实施方式
19.下面结合具体实施例对本实用新型作进一步描述,在此实用新型的示意性实施例以及说明用来解释本实用新型,但并不作为对本实用新型的限定。
20.实施例1
21.如图1-6所示,一种无人机全自动机巢,包括有机巢舱1,机巢舱1顶部两侧均安装有滑轨组件2;舱盖3,滑轨组件2上安装有舱盖3,舱盖3通过滑轨组件2的相对滑动以打开或关闭机巢口;升降装置4,机巢舱1底部一侧设置有升降装置4;停机坪5,升降装置4的升降悬臂顶部设置有停机坪5;归中充电机构6,停机坪5的四周侧板均开有滑槽501,停机坪5上安装有归中充电机构6;归中充电机构6包括横向归中杆61和纵向归中杆62,停机坪5四周侧板的滑槽501内分别滑动式设置有两两组合的横向归中杆61和纵向归中杆62;螺母套63,横向归中杆61和纵向归中杆62的末端均设置有螺母套63;丝杆64,停机坪5底部四周边缘处均通过轴承座安装有丝杆64,丝杆64与螺母套63滑动配合传动,相对方向的两根丝杆64通过同步带轮组件传动连接;步进电机65,停机坪5底部靠近轴承座处设置有步进电机65,步进电机65通过减速机与丝杆64传动连接;感应开关66,停机坪5底部靠近螺母套63处间隔设置有若干感应开关66。
22.所述感应开关66布置有2个以上并间隔设置在螺母套63运动路线上;所述感应开关66通过感应螺母套63是否到达指定位置,以此控制归中杆自动暂停或开始运动。
23.本实用新型的全自动机巢以及自动归中充电机构6,其设计规划布局均合理、高效。其中归中充电机构6采用步进电机65、同步带轮组件驱动丝杆64来实现相对方向的横向/纵向归中杆62的同步并拢运动,推动无人机的支脚架进而带动无人机整体向停机坪5的中心进行移动完成横/纵方向上的同步归中动作。
24.此外,当感应开关66通过感应螺母套63到达某个指定位置时发出电信号,电器控制柜以此电信号判断并通过电机控制归中杆自动暂停或开始运动。进一步提高了定位精度,避免无人机降落后位置有偏差无法充电的情况,有效提升了无人机机巢的稳定性和可
靠性,提高了无人机机巢的自动化程度。
25.实施例2
26.如图5和图6所示,在实施例1的基础之上,还包括有充电座7,纵向归中杆62顶部中间安装有充电座7;充电插孔8,飞行器支脚上与充电座7平齐处安装有充电插孔8,充电座7与充电插孔8配合接插充电。
27.在横向/纵向归中杆62向中间运动并拢的过程中,位于无人机支脚上的充电插孔8与纵向归中杆62顶部的充电座7的探针进行接触式插接充电,实现了无人机降落后始终能停放于中心固定的位置处且无人机支脚上的充电插孔8能与充电座7完美对接,自动充电。
28.还包括有舱盖3传感器,机巢内壳上部靠近舱盖3处间隔分布有若干舱门传感器;所述舱盖3传感器用于检测舱盖3是否呈完全打开的状态。两个对称设置的舱盖3可在舱盖3传感器的感应下,并通过滑轨组件2的相对滑动以打开或关闭机巢口,使机巢的正上方呈完全打开的状态,避免妨碍无人机的降落或起飞时产生碰撞等问题。
29.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种无人机全自动机巢,其特征在于,包括有机巢舱(1),机巢舱(1)顶部两侧均安装有滑轨组件(2);舱盖(3),滑轨组件(2)上安装有舱盖(3),舱盖(3)通过滑轨组件(2)的相对滑动以打开或关闭机巢口;升降装置(4),机巢舱(1)底部一侧设置有升降装置(4);停机坪(5),升降装置(4)的升降悬臂顶部设置有停机坪(5);归中充电机构(6),停机坪(5)的四周侧板均开有滑槽(501),停机坪(5)上安装有归中充电机构(6);归中充电机构(6)包括横向归中杆(61)和纵向归中杆(62),停机坪(5)四周侧板的滑槽(501)内分别滑动式设置有两两组合的横向归中杆(61)和纵向归中杆(62);螺母套(63),横向归中杆(61)和纵向归中杆(62)的末端均设置有螺母套(63);丝杆(64),停机坪(5)底部四周边缘处均通过轴承座安装有丝杆(64),丝杆(64)与螺母套(63)滑动配合传动,相对方向的两根丝杆(64)通过同步带轮组件传动连接;步进电机(65),停机坪(5)底部靠近轴承座处设置有步进电机(65),步进电机(65)通过减速机与丝杆(64)传动连接;感应开关(66),停机坪(5)底部靠近螺母套(63)处间隔设置有若干感应开关(66)。2.根据权利要求1所述的一种无人机全自动机巢,其特征在于,所述感应开关(66)布置有2个以上并间隔设置在螺母套(63)运动路线上;所述感应开关(66)通过感应螺母套(63)是否到达指定位置,以此控制归中杆自动暂停或开始运动。3.根据权利要求1或2所述的一种无人机全自动机巢,其特征在于,还包括有充电座(7),纵向归中杆(62)顶部中间安装有充电座(7);充电插孔(8),飞行器支脚上与充电座(7)平齐处安装有充电插孔(8),充电座(7)与充电插孔(8)配合接插充电。4.根据权利要求1或2所述的一种无人机全自动机巢,其特征在于,还包括有舱盖(3)传感器,机巢内壳上部靠近舱盖(3)处间隔分布有若干舱门传感器;所述舱盖(3)传感器用于检测舱盖(3)是否呈完全打开的状态。
技术总结
本实用新型涉及无人机技术领域,具体涉及一种无人机全自动机巢。本实用新型提供一种具有自动归中充电功能的无人机全自动机巢。一种无人机全自动机巢,包括:机巢舱,机巢舱顶部两侧均安装有滑轨组件;舱盖,滑轨组件上安装有舱盖,舱盖通过滑轨组件的相对滑动以打开或关闭机巢口;升降装置,机巢舱底部一侧设置有升降装置;停机坪,升降装置的升降悬臂顶部设置有停机坪;归中充电机构,停机坪的四周侧板均开有滑槽。归中充电机构采用步进电机、同步带轮组件驱动丝杆来实现相对方向的横向/纵向归中杆的同步并拢运动。中杆的同步并拢运动。中杆的同步并拢运动。
技术研发人员:蔡茂林 郭向群 辛浩达 李群 常建 杨承章 刘凡宾 马国鹏 余猛 姜昊坤
受保护的技术使用者:江西壮龙无人机科技有限公司
技术研发日:2022.09.08
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。