技术特征:
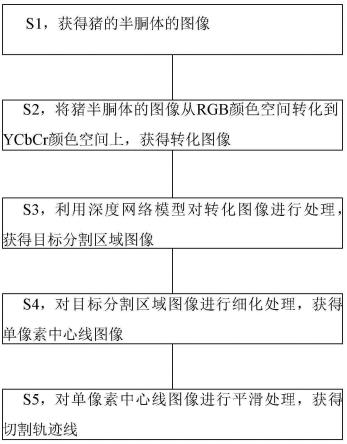
1.一种基于深度网络的猪半胴体切割轨迹线识别方法,其特征在于,包括以下步骤:s1,获得猪半胴体的图像;s2,将猪半胴体的图像从rgb颜色空间转化到ycbcr颜色空间上,获得转化图像;s3,利用深度网络模型对转化图像进行定位处理,获得目标分割区域图像;所述深度网络模型为端到端的模型,由目标检测模型和分割模型级联构成,目标检测模型对转化图像进行粗定位处理,获得包含设定的分割区域的roi,分割模型对roi进行精定位处理,获得目标分割区域图像;s4,对目标分割区域图像进行细化处理,获得单像素中心线图像;先对目标分割区域图像进行图像二值化处理,再利用骨架提取算法或细化算法进行细化处理获得单像素中心线图像;s5,对单像素中心线图像进行平滑处理,获得切割轨迹线;利用毛刺剔除算法对单像素中心线进行平滑处理,获得平滑中心线图像,将平滑中心线图像中的平滑中心线作为切割轨迹线。2.根据权利要求1所述的一种基于深度网络的猪半胴体切割轨迹线识别方法,其特征在于,步骤s1包括以下步骤:s1.1,设置背景板,对背景板拍照建模,得到背景模型;s1.2,将猪半胴体置于背景板前拍照,获得包括猪半胴体和背景板的图像;s1.3,基于背景模型,采用差分法、高斯混合模型分离算法或k近邻模型对包括猪半胴体和背景的图像进行处理,获得猪半胴体的图像。3.根据权利要求1所述的一种基于深度网络的猪半胴体切割轨迹线识别方法,其特征在于,步骤s3中目标检测模型采用基于深度卷积神经网络的图像目标检测模型,分割模型采用基于深度卷积神经网络的图像语义分割模型。4.根据权利要求1所述的一种基于深度网络的猪半胴体切割轨迹线识别方法,其特征在于,步骤s3中,分割模型采用带空洞卷积的mobilenet网络模型,获得目标分割区域图像的过程具体为:首先利用带空洞卷积的mobilenet网络处理roi的图像数据,提取获得图像特征层;然后利用四组空洞可变形卷积层和一个图像池化层对图像特征层进行特征提取,将提取的特征依次进行堆叠、1
×
1卷积核压缩及采样4倍扩展处理得到数据a;再将图像特征层经过压缩处理得到数据b;最后将数据a和数据b依次进行堆叠、3
×
3卷积核压缩及采样4倍扩展处理,得到目标分割区域;四组并行的空洞可变形卷积层由一个1
×
1卷积核和三个3
×
3卷积核构成,三个3
×
3卷积核的扩张率分别为3、6和12。5.根据权利要求1所述的一种基于深度网络的猪半胴体切割轨迹线识别方法,其特征在于,步骤s4中采用zhang-suen细化算法进行细化处理。6.根据权利要求1所述的一种基于深度网络的猪半胴体切割轨迹线识别方法,其特征在于,步骤s5包括以下步骤:s5.1,单像素中心线图像中白色像素点的像素值为1,黑色像素点的像素值为0;获取单像素中心线图像中像素点的行数m和列数n,设点m(i,j)为单像素中心线图像上的一个像素点,点m(i,j)的像素值为f(i,j),i=1,
…
,m;j=1,
…
,n;s5.2,若点m(i,j)的像素值f(i,j)=1,统计点m(i,j)周围像素点个数y,计算公式为:
围绕点m(i,j)采用一个3
×
3模板,3
×
3模板中共有9个像素点,点m(i,j)位于3
×
3模板的中心位置,除点m(i,j)外的8个点为点m(i,j)的临近点,n
d
为各临近点的像素值;s5.3,若y>2,计算点m(i,j)与各临近点连接方向的分支长度l
d
,设定长度阈值l
t
,若l
d
<l
t,
则将l
d
所在分支进行删除,即将相应的分支转为黑色像素点;s5.4,循环单像素中心线图像中的所有像素点,利用s5.2和s5.3分别进行处理,获得平滑中心线图像。7.根据权利要求1所述的一种基于深度网络的猪半胴体切割轨迹线识别方法,其特征在于,步骤s3中设定的分割区域包括第四根和第五根肋骨之间骨缝区域和尾椎骨第二骨节区域,利用步骤s3、s4和s5分别获得第四根和第五根肋骨之间骨缝处和尾椎骨第二骨节处的切割轨迹线。
技术总结
本发明公开一种基于深度网络的猪半胴体切割轨迹线识别方法,包括以下步骤:S1,获得猪半胴体的图像;S2,将猪半胴体的图像从RGB颜色空间转化到YCbCr颜色空间上,获得转化图像;S3,利用深度网络模型对转化图像进行定位处理,获得目标分割区域图像;S4,对目标分割区域图像进行细化处理,获得单像素中心线图像;S5,对单像素中心线图像进行平滑处理,获得切割轨迹线;本发明采用级联模型构成端到端深度网络模型,提高了对设定的分割区域的定位精度,再配合使用细化处理和平滑处理,能够获得精度高的切割轨迹线。的切割轨迹线。的切割轨迹线。
技术研发人员:付寅飞
受保护的技术使用者:南京埃斯顿自动化股份有限公司
技术研发日:2022.08.15
技术公布日:2022/11/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。