技术特征:
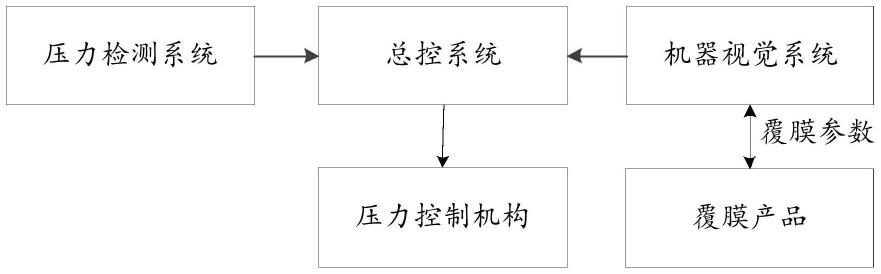
1.一种智能化的覆膜机自动控制系统,其特征在于,包括:压力检测系统、机器视觉系统和总控系统;基于压力检测系统检测覆膜时的覆膜产品所承受的压力值,总控系统根据检测到的压力值调整压力控制机构的压力大小;通过机器视觉系统对覆膜产品的覆膜参数进行检测,所述覆膜参数包括平整度、贴合度以及灰尘杂质率;总控系统通过机器视觉系统检测出覆膜参数是否符合设定值的,若不符合,根据不同参数对应不同的处理流程,将不符合规定的覆膜产品经由相应的通道移动至相应的位置,进行二次加工或回收处理。2.根据权利要求1所述的一种智能化的覆膜机自动控制系统,其特征在于,所述机器视觉系统设置在第一检测平台上;若检测到贴合度不符合规定的,将覆膜产品由所述第一检测平台移动至二次调压机构上,通过二次调压机构上的增加设备增加贴合度;若检测到平整度或灰尘杂质率中有一个参数不符合规定的,将覆膜产品由所述第一检测平台移动至撕膜平台,通过撕膜平台设置的撕膜装置撕去膜,撕膜后的产品继续移动至覆膜机的传送带上,进行二次贴膜;若检测到三个参数均不符合规定的,将覆膜产品由所述第一检测平台移动至不合格产品传送带上进行回收处理。3.根据权利要求2所述的一种智能化的覆膜机自动控制系统,其特征在于,若检测到在预设时间段内,出现贴合度不符合规定的产品占总输出产品的10%,将二次调压机构上设置的压力参数传输至总控系统,所述总控系统将该压力参数传输至压力控制机构,调整压力控制机构输出的压力。4.根据权利要求1所述的一种智能化的覆膜机自动控制系统,其特征在于,还包括定位系统,所述定位系统采用机器视觉系统进行待覆膜的产品的定位;当定位系统检测到待覆膜的产品未在设定范围内时,计算现在位置到设定范围的距离坐标,通过向微调机构发送距离坐标,所述微调机构根据距离坐标对待覆膜的产品进行位置微调,直至定位系统检测到待覆膜的产品位于设定范围内之后,停止微调机构的位置微调操作。5.根据权利要求1所述的一种智能化的覆膜机自动控制系统,其特征在于,在机器视觉系统进行定位标定时,采用棋盘标定法对相机进行标定,具体标定方法如下:打印一张棋盘格,将其粘贴在平面上作为基准;通过调整标定对象或摄像机的方向,拍摄一些不同方向的标定目标照片;从图像中提取棋盘格角点;估算无畸变理想条件下,内部参数和外部参数值;利用最小二乘法估计实际径向畸变下的畸变系数;用极大似然法优化估计提高估计精度。6.根据权利要求2所述的一种智能化的覆膜机自动控制系统,其特征在于,在机器视觉系统进行定位标定时,标定板由黑白网格组成,在成像过程中,网格板与相机之间存在一定
的角度,网格板上的点分别成像为像素坐标点;设置直线运动速度与线阵相机采样频率相匹配,获取整幅网格板图像,从中提取多行像素作为对应点对;图像中的某一行对应于画线处的图像,黑白网格交界线处的点将会作为特征点进行提取,将坐标原点设置为标定板的一个角点位置;至少存在一个坐标已知,与x方向网格线交点的y方向的坐标值已知,与y方向网格线交点的坐标值已知;直接获得位于角点位置的特征点坐标;根据所选择行中特征点已知的坐标信息并结合射影几何的交比定理,以获得所有特征点的世界坐标;基于世界坐标及畸变校正模型确定物理位置。7.根据权利要求2所述的一种智能化的覆膜机自动控制系统,其特征在于,利用机器视觉系统对贴合度进行检测时,标定相机后,采集图像和视频数据,建立图像和视频数据集,对其进行图像和视频去噪,利用去噪后得到的清晰图像和视频帧,进行毛刺图像分割,得到边缘二维像素坐标,利用改进orb算法提取出特征点对二维像素坐标,将图像分割得到的边缘二维像素坐标与特征点提取与匹配点对像素坐标取交集,得到图像边缘特征点对二维像素坐标位置,利用对极几何以及三角测量原理计算得到三维工件边缘坐标;基于三维工件边缘坐标确定贴合度。8.根据权利要求1所述的一种智能化的覆膜机自动控制系统,其特征在于,还包括平整度检测系统,该平整度检测系统包括点阵光源和线性光源;通过点阵光源或线性光源投射至已经覆膜的覆膜产品上,通过机器视觉系统拍摄具有光源影响的带光源图像,通过对所述带光源图像进行分析,确定已经覆膜的覆膜产品的覆膜的平整度;平整度检测系统还包括计算单元,基于所述标准模型确定覆膜的平整度;所述标准模型记录有机器视觉系统中相机的内部参数以及坐标移动量,所述坐标移动量是标准坐标与移动坐标之间的坐标移动差值,所述标准坐标是覆膜处于绝对平整情况下,对应的带光源图像中激光轮廓线上的像素点的第一位置坐标值;所述移动坐标是实际拍摄的覆膜图像中激光轮廓线上的像素点的第二位置坐标值,所述坐标移动量是所述第一位置坐标值与第二位置坐标值之间的差值;所述计算单元基于坐标移动量和内部参数计算确定是否有不平整的部分,或者不平整部分所处的位置。9.根据权利要求8所述的一种智能化的覆膜机自动控制系统,其特征在于,所述标准模型包括坐标移动量确定子单元,所述坐标移动量确定子单元包括:曲线段查找子单元,利用最小二乘法拟合出激光轮廓线最接近的一条直线,从右向左扫描激光轮廓线上的像素点,计算每一点到拟合直线的距离;判断计算出的距离最大值是否大于设定阈值,若大于,则该点为激光直线上曲线段的顶点,以该顶点为基准点分别向左右两侧扫描寻找第一个到拟合直线的距离小于设置阈值的点作为该段弯曲区域的左右边界,确定该曲线段的边界信息,重复上述方法直至确定激光线上所有曲线段的边界信息;坐标值确定子单元,对于激光线上的平直段,采用低通滤波方式得到平直段的激光轮廓线,对于激光线上的曲线段,采用曲线段的两个边界点构造直线方程,利用方程差值计算的方式得到曲线段内各点坐标,确定曲线段的激光轮廓线;基于激光轮廓线的位置坐标与标准坐标作差计算,确定坐标移动量。
10.根据权利要求1所述的一种智能化的覆膜机自动控制系统,其特征在于,还包括空间微尘检测设备,通过空间微尘检测设备检测覆膜机所在空间的微尘数据,将微尘数据传输至总控系统,总控系统根据微尘数据判断是否超过设定阈值,若查过设定阈值,则向除尘控制机构发送除尘指令,所述除尘机构根据接收到的除尘指令进行除尘操作。
技术总结
本发明公开了一种智能化的覆膜机自动控制系统,包括:压力检测系统、机器视觉系统和总控系统;基于压力检测系统检测覆膜时的覆膜产品所承受的压力值,总控系统根据检测到的压力值调整压力控制机构的压力大小;通过机器视觉系统对覆膜产品的覆膜参数进行检测,所述覆膜参数包括平整度、贴合度以及灰尘杂质率;总控系统通过机器视觉系统检测出覆膜参数是否符合设定值的,若不符合,根据不同参数对应不同的处理流程,将不符合规定的覆膜产品经由相应的通道移动至相应的位置,进行二次加工或回收处理。本发明可提高自动化控制的精度,并且实现全自动化。现全自动化。现全自动化。
技术研发人员:林宜潘 刘勇 邹高
受保护的技术使用者:深圳市利和兴股份有限公司
技术研发日:2022.09.06
技术公布日:2022/11/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。