技术特征:
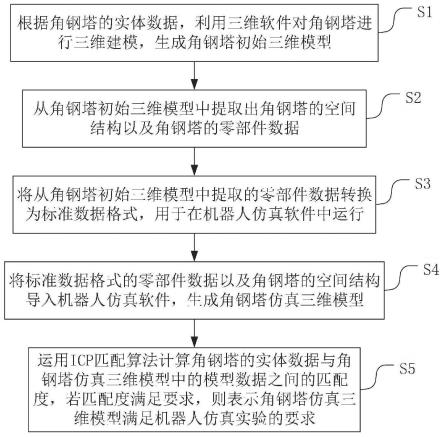
1.一种基于icp匹配算法的角钢塔三维空间模型验证方法,其特征在于,s1,根据角钢塔的实体数据,利用三维软件对角钢塔进行三维建模,生成角钢塔初始三维模型;角钢塔的实体数据包括:角钢塔中各个零部件在世界坐标系中的位置坐标,以及各个零部件之间的连接关系;s2,从角钢塔初始三维模型中提取出角钢塔的空间结构以及角钢塔的零部件数据,角钢塔的零部件数据包括:零部件的种类、编号id、在三维软件坐标系中的位置坐标;s3,将从角钢塔初始三维模型中提取的零部件数据转换为标准数据格式,用于在机器人仿真软件中运行;s4,将标准数据格式的零部件数据导入机器人仿真软件,生成角钢塔仿真三维模型;s5,运用icp匹配算法计算角钢塔的实体数据与角钢塔仿真三维模型中的模型数据之间的匹配度,若匹配度满足要求,则表示角钢塔仿真三维模型满足机器人仿真实验的要求;若匹配度不满足要求,则表示角钢塔仿真三维模型不满足机器人仿真实验的要求。2.根据权利要求1所述的一种基于icp匹配算法的角钢塔三维空间模型验证方法,其特征在于,步骤s5中,运用icp匹配算法计算角钢塔的实体数据与仿真三维模型中的模型数据之间的匹配度,具体如下所示:s51,从角钢塔实体上选取n个实体零部件,利用角钢塔实体上的此n个实体零部件在世界坐标系中的位置坐标,构建标准点集q:q={q1,q2,...,q
n
}={q
i
|i=1,2,
…
n}其中,q
i
表示标准点集q中的第i个数据,q
i
为角钢塔实体上所选取的第i个实体零部件在世界坐标系中的位置坐标;s52,从角钢塔仿真三维模型中选取与角钢塔实体上所选取的n个实体零部件一一对应的n个模型零部件,利用角钢塔仿真三维模型中的此n个模型零部件在仿真三维模型坐标系中的位置坐标,构建待匹配点集w:w={w1,w2,...,w
n
}={w
i
|i=1,2,
…
n}其中,w
i
表示待匹配点集w中的第i个数据,w
i
为角钢塔仿真三维模型上所选取的第i个模型零部件在仿真三维模型坐标系中的位置坐标;s53,设计目标函数为标准点集和待匹配点集之间的误差函数,目标函数如下所示:其中,r表示旋转矩阵,r为3*3的矩阵,t表示平移向量,t为3*1的向量;s54,根据标准点集和待匹配点集中的数据,计算旋转矩阵r和平移矩阵t,使得目标函数的值最小;s55,根据步骤s4得到的旋转矩阵r和平移矩阵t,根据目标函数e(r,t)计算标准点集和待匹配点集之间的误差值即匹配度,判断匹配度是否满足阈值要求;若满足,则表示角钢塔的仿真三维模型满足要求;若不满足,则表示角钢塔的仿真三维模型不满足要求,进行下一次迭代,迭代方式为:利用步骤s54得到的旋转矩阵r和平移矩阵t对待匹配点集进行旋转和平移变换,得到
新点集,按照步骤s54的方式利用标准点集和新点集中的数据重新计算旋转矩阵r和平移矩阵t,得到新的旋转矩阵r和新的平移矩阵t,并利用新的旋转矩阵r和新的平移矩阵t代入目标函数e(r,t)重新计算标准点集和待匹配点集之间的匹配度,若匹配度满足阈值要求,则表示角钢塔仿真三维模型满足要求,且得到旋转矩阵r和平移矩阵t的最优解,停止迭代;否则,表示角钢塔仿真三维模型仍不满足要求,继续进行下一次迭代,直至超过最大迭代次数退出循环。3.根据权利要求2所述的一种基于icp匹配算法的角钢塔三维空间模型验证方法,其特征在于,步骤s54中,旋转矩阵r和平移矩阵t的计算具体如下所示:s541,分别计算标准点集和待匹配点集的质心:s541,分别计算标准点集和待匹配点集的质心:其中,u
q
为标准点集的质心,u
w
为待匹配点集的质心;s542,分别对标准点集和待匹配点集去中心化,得到去中心化后的标准点集和待匹配点集:q
i
'=q
i-u
q
w
i
'=w
i-u
w
其中,q
i
'为去中心化后的标准点集中的第i个数据,w
i
'为去中心化后的待匹配点集中的第i个数据;s543,构建矩阵h:s544,对矩阵h进行svd分解,根据矩阵h的svd分解结果,得到旋转矩阵r和平移矩阵t:h=u∑v
t
r=vu
t
t=u
q-ru
w
其中,u、v为矩阵h进行svd分解后得到的矩阵。4.根据权利要求1所述的一种基于icp匹配算法的角钢塔三维空间模型验证方法,其特征在于,步骤s1中,根据角钢塔的实体数据,利用3dsmax三维软件对角钢塔进行三维建模。5.根据权利要求1所述的一种基于icp匹配算法的角钢塔三维空间模型验证方法,其特征在于,步骤s3中,将从角钢塔初始三维模型中提取的零部件数据转换为xml格式。6.根据权利要求1或5所述的一种基于icp匹配算法的角钢塔三维空间模型验证方法,其特征在于,角钢塔的空间结构是由若干个基础模块构成的,每个基础模块是由若干个零部件连接构成的;步骤s3中,将同一种类的零部件数据以链表的形式进行存储,即每一种类的零部件数
据对应有一个链表数据,将各个种类的链表数据存储在一个数组中,最终生成标准数据格式的dae;链表中的零部件数据包含零部件的编号id、在三维软件坐标系中的位置坐标。7.根据权利要求1所述的一种基于icp匹配算法的角钢塔三维空间模型验证方法,其特征在于,步骤s4中,将标准数据格式的零部件数据导入机器人仿真软件时,需要进行模型数据转换,具体如下所示:s41,设角钢塔上某零部件中心点为点p,三维软件坐标系以z轴向上,在角钢塔的初始三维模型中,向量的坐标p
tower
为(x,y,z),且点p在xy平面、xz平面、yz平面的投影分别为点m、点p、点n;其中,点n的坐标为(z,y);o为三维软件的坐标系的原点;s42,机器人仿真软件坐标系以y轴向上,在角钢塔的仿真三维模型中,向量绕x轴逆旋转θ角,θ=90
°
,向量旋转后的坐标p
unity
为(x',y',z');p
unity
的计算方式如下所示:p
unityt
=r
x
(θ)p
towert
;其中,r
x
(θ)为绕x轴旋转θ角的旋转矩阵;
技术总结
本发明公开了一种基于ICP匹配算法的角钢塔三维空间模型验证方法,涉及三维建模技术领域,该方法:根据角钢塔的实体数据,利用三维软件对角钢塔进行三维建模,生成角钢塔初始三维模型;从角钢塔初始三维模型中提取出角钢塔的空间结构以及角钢塔的零部件数据;将从数据转换为用于在机器人仿真软件中运行的标准数据格式;将标准数据格式导入机器人仿真软件,生成角钢塔仿真三维模型;运用ICP匹配算法计算角钢塔的实体数据与角钢塔仿真三维模型中的模型数据之间的匹配度,从而判断角钢塔仿真三维模型是否满足机器人仿真实验的要求。维模型是否满足机器人仿真实验的要求。维模型是否满足机器人仿真实验的要求。
技术研发人员:张金锋 汪胜和 都海波 谢枫 刘军 程智余 张天忠 罗义华 刘勇 王道静 王鹏 刘大平 蔡必壮 王福全 张家倩 吴睿 周贺 许水清 刘雁生 葛展展
受保护的技术使用者:合肥工业大学 中国能源建设集团安徽省电力设计院有限公司
技术研发日:2022.07.21
技术公布日:2022/11/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。