1.本发明涉及图像处理技术领域,尤其涉及一种位移测量方法、系统、存储介质和电子设备。
背景技术:
2.在众多的工业领域中,对于位移的监测是必不可少的一环,位移监测的技术主要分为接触式和非接触式。而在现阶段的探头编码器中,接触式编码器长期暴露在外,与外界环境接触,所以造成容易损坏;并且在特定环境下,接触式编码器的测量传感器会造成一定的测量误差,从而影响测量结果的准确性。而当前主流的非接触式位移测量方法主要采用红外测量仪测量,其需要人工持续操控跟踪。传统的测量方法显然不适合当今探头的位移测量。
3.近年来,随着数字图像技术和高速计算机技术的飞速发展,机器视觉和数字近景测量成功应用于位移的测量,研发的视觉位移传感器克服了传统位移传感器的局限性,能够同时测量指定区域内多点的三维空间坐标,具有非接触测量、精度高、不受电磁干扰、信息化程度高、现场安装方便、操作简单等诸多优点。非接触测量技术已经在航空航天、武器制导、快速制动等尖端领域中发挥着重要作用,摄像测量的优势就突显出来,相机标定是摄像测量的基础,但其在前置工作复杂。在一定应用环境下耗费时间多。因此,亟需提供一种技术方案解决现有技术中存在的问题。
技术实现要素:
4.为解决上述技术问题,本发明提供了一种位移测量方法、系统、存储介质和电子设备。
5.本发明的一种位移测量方法的技术方案如下:
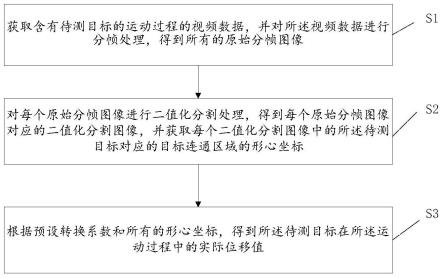
6.s1、获取含有待测目标的运动过程的视频数据,并对所述视频数据进行分帧处理,得到所有的原始分帧图像;
7.s2、对每个原始分帧图像进行二值化分割处理,得到每个原始分帧图像对应的二值化分割图像,并获取每个二值化分割图像中的所述待测目标对应的目标连通区域的形心坐标;
8.s3、根据预设转换系数和所有的形心坐标,得到所述待测目标在所述运动过程中的实际位移值。
9.本发明的一种位移测量方法的有益效果如下:
10.本发明的方法通过获取图像对应的形心坐标并计算目标运行位移值,在提高运行效率的同时,也能避免相机标定所产生的摄像头拍摄图像的边缘产生畸变的问题,从而减少资源损耗,提高位移测量的便捷性。
11.在上述方案的基础上,本发明的一种位移测量方法还可以做如下改进。
12.进一步,所述对每个原始分帧图像进行二值化分割处理,得到每个原始分帧图像
对应的二值化分割图像,包括:
13.对每个原始分帧图像分别进行中值滤波,得到每个原始分帧图像对应的滤波分帧图像;
14.对每个滤波分帧图像分别进行灰度级变换,得到每个滤波分帧图像对应的包含二值化图像边界的增强分帧图像;
15.利用最大类间方差法,对每个增强分帧图像分别进行图像分割处理,得到每个原始分帧图像对应的二值化分割图像。
16.进一步,所述含有待测目标的运动过程的视频数据,包括:通过摄像设备获取含有所述待测目标的运动过程的视频数据。
17.进一步,获取所述预设转换系数的过程,包括:
18.根据首帧原始分帧图像的像素点数量、所述摄像设备的拍摄高度和所述摄像设备的圆形光源的半径,得到所述拍摄高度和所述圆形光源的转换比例,并根据所述转换比例,得到像素点坐标与实际坐标之间的所述预设转换系数。
19.进一步,所述s3包括:
20.s31、获取目标帧原始分帧图像对应的形心坐标,并判断所述首帧原始分帧图像的形心坐标是否位于所述目标帧原始分帧图像内,得到判断结果;
21.s32a、当所述判断结果为是时,根据所述预设转换系数、所述首帧原始分帧图像的形心坐标与所述目标帧原始分帧图像的形心坐标之间的差值,得到所述待测目标的位移差值;
22.s32b、当所述判断结果为否时,确定所述首帧原始分帧图像的形心坐标丢失前的一帧原始分帧图像为所述目标帧原始分帧图像,并根据所述预设转换系数、所述首帧原始分帧图像的形心坐标与所述目标帧原始分帧图像的形心坐标之间的差值,得到所述待测目标的位移差值;
23.s33、将所述目标帧原始分帧图像作为所述目标帧原始分帧图像至末帧原始分帧图像之间的首帧原始分帧图像,并循环执行s31,直至所述目标帧原始分帧图像为所述末帧原始分帧图像时,根据所有的位移差值得到所述待测目标的所述实际位移值。
24.进一步,还包括:
25.根据所述预设转换系数和任意两个相邻帧数的原始分帧图像对应的形心坐标之间的差值,得到所述任意两个相邻帧数的二值化分割图像之间的片段位移值,直至得到所述首帧原始分帧图像与所述末帧原始分帧图像之间的所有的片段位移值;
26.根据所有的片段位移值,得到所述待测目标在所述运动过程中的运动变化轨迹。
27.本发明的一种位移测量系统的技术方案如下:
28.包括:采集模块、处理模块和运行模块;
29.所述采集模块用于:获取含有待测目标的运动过程的视频数据,并对所述视频数据进行分帧处理,得到所有的原始分帧图像;
30.所述处理模块用于:对每个原始分帧图像进行二值化分割处理,得到每个原始分帧图像对应的二值化分割图像,并获取每个二值化分割图像中的所述待测目标对应的目标连通区域的形心坐标;
31.所述运行模块用于:根据预设转换系数和所有的形心坐标,得到所述待测目标在
所述运动过程中的实际位移值。
32.本发明的一种位移测量系统的有益效果如下:
33.本发明的系统通过获取图像对应的形心坐标并计算目标运行位移值,在提高运行效率的同时,也能避免相机标定所产生的摄像头拍摄图像的边缘产生畸变的问题,从而减少资源损耗,提高位移测量的便捷性。
34.在上述方案的基础上,本发明的一种位移测量系统还可以做如下改进。
35.进一步,所述处理模块包括:第一处理模块、第二处理模块和第三处理模块;
36.所述第一处理模块用于:对每个原始分帧图像分别进行中值滤波,得到每个原始分帧图像对应的滤波分帧图像;
37.所述第二处理模块用于:对每个滤波分帧图像分别进行灰度级变换,得到每个滤波分帧图像对应的包含二值化图像边界的增强分帧图像;
38.所述第三处理模块用于:利用最大类间方差法,对每个增强分帧图像分别进行图像分割处理,得到每个原始分帧图像对应的二值化分割图像。
39.本发明的一种存储介质的技术方案如下:
40.存储介质中存储有指令,当计算机读取所述指令时,使所述计算机执行如本发明的一种位移测量方法的步骤。
41.本发明的一种电子设备的技术方案如下:
42.包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时,使所述计算机执行如本发明的一种位移测量方法的步骤。
附图说明
43.图1为本发明实施例的一种位移测量方法的流程示意图;
44.图2为本发明实施例的一种位移测量系统的结构示意图。
具体实施方式
45.如图1所示,本发明实施例的一种位移测量方法,包括如下步骤:
46.s1、获取含有待测目标的运动过程的视频数据,并对所述视频数据进行分帧处理,得到所有的原始分帧图像。
47.其中,待测目标为:人、动物或物体,具体不设限制。运动过程为:移动、奔跑、行走等运动过程。原始分帧图像为:对视频数据进行分帧处理后,视频数据中的某一帧图像。
48.具体地,采用摄像设备获取待测目标的运动全过程的视频数据,并在matlab中调用出strcat函数将视频数据进行分帧处理,得到所有的原始分帧图像,再在matlab中调用imwrite函数将所有的原始分帧图像进行存储。
49.需要说明的是,在matlab中调用出strcat函数将视频数据进行分帧处理的过程为现有技术,在matlab中调用imwrite函数将所有的原始分帧图像进行存储的过程为现有技术,具体过程在此不过多赘述。
50.s2、对每个原始分帧图像进行二值化分割处理,得到每个原始分帧图像对应的二值化分割图像,并获取每个二值化分割图像中的所述待测目标对应的目标连通区域的形心
坐标。
51.其中,二值化分割图像为:原始分帧图像进行中值滤波、颜色提取、二值化、otsu图像分割法等步骤处理后所得到的图像,其具有以下特征:
①
在某些特征方面(如灰度、颜色、纹理等)具有一致性;
②
区域内部单一,没有过多小孔;
③
相邻区域对分割所依据的特征有明显的差别。
52.具体地,利用matlab对每个原始分帧图像进行二值化和阈值处理图像处理后,得到每个原始分帧图像对应的二值化分割图像,并采用matlab中的regionprops函数,获取每个二值化分割图像中的连通区域的形心坐标。
53.需要说明的是,二值化处理是对图像中的待测目标对应的图像和待测目标以外的图像进行区分。阈值处理是将图像中的像素分为两类,低于预设灰度值的像素所构成的区域为目标区域(待测目标对应的区域),高于预设灰度值的像素所构成的区域为背景区域(待测目标对应区域以外的区域)。其中,采用最大类间方差法(otsu)得到阈值为类内方差最小或类间方差最大、或者类内和类间方差比值最小的最佳比值。
54.s3、根据预设转换系数和所有的形心坐标,得到所述待测目标在所述运动过程中的实际位移值。
55.其中,预设转换系数为:图像像素坐标与实际坐标系的转换系数。
56.其中,实际位移值为:待测目标在整个运动过程中的位移值,需要根据所有的形心坐标进行计算。具体地,根据首帧原始分帧图像对应的形心坐标和目标帧(末帧)原始分帧图像对应的形心坐标之间的差值,并利用预设转换系数所得到的不同连通区域形心间的实际位移差值,最终根据所有得到的位移差值得到待测目标在运动过程中的实际位移值。
57.较优地,所述对每个原始分帧图像进行二值化分割处理,得到每个原始分帧图像对应的二值化分割图像,包括:
58.对每个原始分帧图像分别进行中值滤波,得到每个原始分帧图像对应的滤波分帧图像。
59.其中,滤波分帧图像为原始分帧图像经过中值滤波后得到的图像。
60.需要说明的是,对原始分帧图像进行中值滤波的过程为现有技术,用于提取原始分帧图像中的图像特征。
61.对每个滤波分帧图像分别进行灰度级变换,得到每个滤波分帧图像对应的包含二值化图像边界的增强分帧图像。
62.其中,增强分帧图像为:滤波分帧图像经过灰度级变换的图像增强方法处理后所得到的图像。
63.需要说明的是,采用灰度级变换的图像增强方法进行图像处理的过程为现有技术,其作用是使得滤波分帧图像中的二值化图像边界更加明显。
64.利用最大类间方差法,对每个增强分帧图像分别进行图像分割处理,得到每个原始分帧图像对应的二值化分割图像。
65.其中,采用最大类间方差法(otsu)对图像进行处理的过程为现有技术。
66.具体地,在matlab中调用imbinarize函数,对增强分帧图像的全局生成某个阈值,将增强分帧图像中的所有像素分为两类,设低灰度为目标区域,高灰度为背景区域(通过otsu得到阈值为类内方差最小或类间方差最大、或者类内和类间方差比值最小的最佳比
值),得到原始分帧图像对应的二值化分割图像。
67.需要说明的是,在matlab中调用imbinarize函数进行处理的过程为现有技术,具体过程在此不过多赘述。
68.较优地,所述含有待测目标的运动过程的视频数据,包括:通过摄像设备获取含有所述待测目标的运动过程的视频数据。
69.其中,本实施例中采用摄像设备安装在探头的正上方或斜上方,利用摄像设备实时测量探头移动的环境变化。在位移测量过程中,探头用于对准待测目标。通过调整摄像设备与探头方向平齐,固定摄像设备的拍摄角度,准确对焦,记录此高度下,拍摄图像边界的实际大小;并利用其录制待测目标运动的全过程,将得到的视频文件导入至相应的系统中进行后续的图像处理。
70.较优地,获取所述预设转换系数的过程,包括:
71.根据首帧原始分帧图像的像素点数量、所述摄像设备的拍摄高度和所述摄像设备的圆形光源的半径,得到所述拍摄高度和所述圆形光源的转换比例,并根据所述转换比例,得到像素点坐标与实际坐标之间的所述预设转换系数。
72.具体地,由于摄像设备的高度固定,所拍摄图像的像素点数量确定,摄像设备中的像素点的圆形光源的实际半径为人为设定,可得出拍摄高度和圆形光源的转换比例,并根据该转换比例,得到像素点坐标与实际坐标之间的所述预设转换系数。例如,图像的横坐标变化为1,而实际横向位移变化量为2,此时预设转换系数为1:2。
73.需要说明的是,根据拍摄高度和圆形光源的转换比例,并根据该转换比例,得到像素点坐标与实际坐标之间的所述预设转换系数的具体实现原理和计算过程为现有技术,在此不过多赘述。
74.较优地,所述s3包括:
75.s31、获取目标帧原始分帧图像对应的形心坐标,并判断所述首帧原始分帧图像的形心坐标是否位于所述目标帧原始分帧图像内,得到判断结果。
76.其中,目标帧原始分帧图像为任一帧的原始分帧图像,可以是首帧原始分帧图像,也可以是末帧原始分帧图像。
77.具体地,当获取目标帧原始分帧图像后,在目标帧原始分帧图像中,判断首帧原始分帧图像的形心坐标是否位于该目标帧原始分帧图像内。
78.需要说明的是,判断某个形心坐标是否位于目标区域内的方法为现有技术。
79.s32a、当所述判断结果为是时,根据所述预设转换系数、所述首帧原始分帧图像的形心坐标与所述目标帧原始分帧图像的形心坐标之间的差值,得到所述待测目标的位移差值。
80.具体地,当首帧原始分帧图像的形心坐标位于目标帧原始分帧图像内时,根据预设转换系数、首帧原始分帧图像的形心坐标与目标帧原始分帧图像的形心坐标之间的差值,将形心坐标的差值转换为待测目标在目标帧与首帧之间的实际位移差值。
81.s32b、当所述判断结果为否时,确定所述首帧原始分帧图像的形心坐标丢失前的一帧原始分帧图像为所述目标帧原始分帧图像,并根据所述预设转换系数、所述首帧原始分帧图像的形心坐标与所述目标帧原始分帧图像的形心坐标之间的差值,得到所述待测目标的位移差值。
82.具体地,当所选取的目标帧原始分帧图像与首帧原始分帧图像之间范围过大,目标帧原始分帧图像中没有原始分帧图像对应的形心坐标时,此时确定首帧原始分帧图像的形心坐标丢失前的一帧原始分帧图像为所述目标帧原始分帧图像,并根据预设转换系数、首帧原始分帧图像的形心坐标与目标帧原始分帧图像的形心坐标之间的差值,得到待测目标的位移差值。
83.例如,原始分帧图像在第五帧消失,则确定第四帧的原始分帧图像为目标帧原始分帧图像。
84.s33、将所述目标帧原始分帧图像作为所述目标帧原始分帧图像至末帧原始分帧图像之间的首帧原始分帧图像,并循环执行s31,直至所述目标帧原始分帧图像为所述末帧原始分帧图像时,根据所有的位移差值得到所述待测目标的所述实际位移值。
85.其中,当获取到一个位移差值时,将目标帧原始分帧图像作为此时目标帧原始分帧图像至末帧原始分帧图像之间的首帧原始分帧图像,循环执行s31的步骤,获取新的目标帧原始分帧图像,直至目标帧原始分帧图像为末帧原始分帧图像时,累加所有的位移差值得到待测目标的实际位移值。
86.较优地,还包括:
87.根据所述预设转换系数和任意两个相邻帧数的原始分帧图像对应的形心坐标之间的差值,得到所述任意两个相邻帧数的二值化分割图像之间的片段位移值,直至得到所述首帧原始分帧图像与所述末帧原始分帧图像之间的所有的片段位移值;
88.根据所有的片段位移值,得到所述待测目标在所述运动过程中的运动变化轨迹。
89.其中,运动变化轨迹为待测目标的变化曲线图。其中,水平坐标为横向位移,垂直坐标为纵向位移。
90.本实施例的技术方案通过获取图像对应的形心坐标并计算目标运行位移值,在提高运行效率的同时,也能避免相机标定所产生的摄像头拍摄图像的边缘产生畸变的问题,从而减少资源损耗,提高位移测量的便捷性。
91.如图2所示,本发明实施例的一种位移测量系统200,包括:采集模块210、处理模块220和运行模块230;
92.所述采集模块210用于:获取含有待测目标的运动过程的视频数据,并对所述视频数据进行分帧处理,得到所有的原始分帧图像;
93.所述处理模块220用于:对每个原始分帧图像进行二值化分割处理,得到每个原始分帧图像对应的二值化分割图像,并获取每个二值化分割图像中的所述待测目标对应的目标连通区域的形心坐标;
94.所述运行模块230用于:根据预设转换系数和所有的形心坐标,得到所述待测目标在所述运动过程中的实际位移值。
95.较优地,所述处理模块220包括:第一处理模块、第二处理模块和第三处理模块;
96.所述第一处理模块用于:对每个原始分帧图像分别进行中值滤波,得到每个原始分帧图像对应的滤波分帧图像;
97.所述第二处理模块用于:对每个滤波分帧图像分别进行灰度级变换,得到每个滤波分帧图像对应的包含二值化图像边界的增强分帧图像;
98.所述第三处理模块用于:利用最大类间方差法,对每个增强分帧图像分别进行图
像分割处理,得到每个原始分帧图像对应的二值化分割图像。
99.本实施例的技术方案通过获取图像对应的形心坐标并计算目标运行位移值,在提高运行效率的同时,也能避免相机标定所产生的摄像头拍摄图像的边缘产生畸变的问题,从而减少资源损耗,提高位移测量的便捷性。
100.上述关于本实施例的一种位移测量系统200中的各参数和各个模块实现相应功能的步骤,可参考上文中关于一种位移测量方法的实施例中的各参数和步骤,在此不做赘述。
101.本发明实施例提供的一种存储介质,包括:存储介质中存储有指令,当计算机读取所述指令时,使所述计算机执行如一种位移测量方法的步骤,具体可参考上文中一种位移测量方法的实施例中的各参数和步骤,在此不做赘述。
102.计算机存储介质例如:优盘、移动硬盘等。
103.本发明实施例提供的一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时,使所述计算机执行如一种位移测量方法的步骤,具体可参考上文中一种位移测量方法的实施例中的各参数和步骤,在此不做赘述。
104.所属技术领域的技术人员知道,本发明可以实现为方法、系统、存储介质和电子设备。
105.因此,本发明可以具体实现为以下形式,即:可以是完全的硬件、也可以是完全的软件(包括固件、驻留软件、微代码等),还可以是硬件和软件结合的形式,本文一般称为“电路”、“模块”或“系统”。此外,在一些实施例中,本发明还可以实现为在一个或多个计算机可读介质中的计算机程序产品的形式,该计算机可读介质中包含计算机可读的程序代码。可以采用一个或多个计算机可读的介质的任意组合。计算机可读介质可以是计算机可读信号介质或者计算机可读存储介质。计算机可读存储介质例如可以是但不限于——电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。计算机可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式计算机磁盘、硬盘、随机存取存储器(ram),只读存储器(rom)、可擦式可编程只读存储器(eprom或闪存)、光纤、便携式紧凑磁盘只读存储器(cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本文件中,计算机可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。