技术特征:
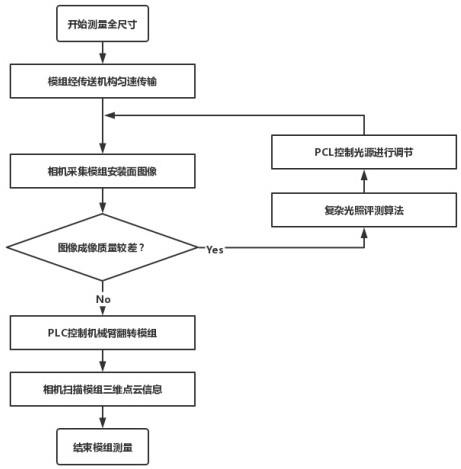
1.一种动力电池模组全尺寸检测方法,其特征在于,包括如下步骤:s1、对传送带上的电池模组进行图像采集,并传输至工控机;s2、工控机对步骤s1采集图像进行图像数据分析,即:通过全局复杂光照适应性数s来评价包括整体光强变化、局部光强分布均匀性、光源照射角度和光源到电池模组的距离的因素对电池模组全尺寸测量的综合影响,若s<阈值s0,则工控机控制光源进行光强和位姿调节,并返回步骤s1重新对图像进行采集;若s≥阈值s0,则进入步骤s3;s3、工控机对步骤s1采集图像进行图像数据处理,即:对电池模组安装面进行灰度化处理、阈值分割、边缘亚像素提取,并拟合边缘得到实际电池模组长度、宽度和安装孔直径;而后,扫描电池模组三维点云信息、对点云信息进行滤波去噪处理、拟合点云平面,得到电池模组的实际高度和安装面平面度。2.根据权利要求1所述的一种动力电池模组全尺寸检测方法,其特征在于,所述步骤s1中,采用ccd相机对传送带上的电池模组进行图像采集。3.根据权利要求1所述的一种动力电池模组全尺寸检测方法,其特征在于,所述步骤s2具体实现步骤如下:步骤s21、对于ccd相机,像素灰度值g(x,y)与光强i(x,y)之间的关系式为:其中,x、y为亚像素下的坐标值;其光强i表示为式中,i0为照明光源的出射光强,i为光源照射角度,d0为光源到电池模组的距离,ρ
d
(x,y)为电池模组表面的反射率分布;步骤s22、假设图像的大小为m
×
n,电池模组和背景的分割阈值记作t,属于电池模组的像素点数占整幅图像的比例记为ω
a
,其平均灰度为μ
a
;背景像素点数占整幅图像的比例为ω
b
,其平均灰度为μ
b
;图像的总灰度记为μ,类间方差记为g;图像中像素灰度值小于阈值t的像素个数记作n0,图像中像素灰度值大于阈值t的像素个数记作n1,则有:ω
a
=n0/m
×
n
ꢀꢀꢀꢀ
(1)ω
b
=n1/m
×
n
ꢀꢀꢀꢀ
(2)n0 n1=m
×
n
ꢀꢀꢀꢀ
(3)ω
a
ω
b
=1
ꢀꢀꢀꢀ
(4)μ=ω
a
*μ
a
ω
b
*μ
b
ꢀꢀꢀꢀ
(5)g=ω
a
(μ
a-μ)^2 ω
b
(μ
b-μ)^2
ꢀꢀꢀꢀ
(6)将式(5)代入式(6),得到等价公式:g=ω
a
ω
b
(μ
a-μ
b
)^2
ꢀꢀꢀꢀ
(7)步骤s23、考虑到实际测量条件下各个测量区域特征不同,将实际光照下电池模组局部边缘轮廓对比度记为c
a
,类间方差记为g
a
,表面光线反射率记为ρ
d1
;电池模组局部安装圆孔对比度记为c
b
,类间方差记为g
b
,表面光线反射率记为ρ
d2
;光照强度为i1;当类间方差g
a
、g
b
分别取最大值时,得到识别电池模组局部边缘轮廓长度的最合适对比度记为c1,识别出电
池模组局部所有圆孔的最合适对比度记为c2,则有:c=∑r(i,j)*r(i,j)*i(i,j)其中,i,j=0,1,2,3...,n-1,r(i,j)=|i-j|即相邻像素间的灰度差;p(i,j)为相邻像素灰度差为r的像素分布概率;定义全局复杂光照适应性数s,s越大则光照适应性越好,若s≥阈值s0,则光照适应性良好,进入步骤s3;反之,则反馈数据信息给工控机,进行光照补偿,调节光强为调节光源位姿重新返回步骤s1。4.根据权利要求1或3所述的一种动力电池模组全尺寸检测方法,其特征在于,所述阈值s0取7.4。5.根据权利要求1所述的一种动力电池模组全尺寸检测方法,其特征在于,步骤s3中,对点云信息进行滤波去噪处理、拟合点云平面的具体实现方式为:(1)对点云信息进行滤波去噪处理:对点云信息中的每个点的邻域进行统计分析,假设点云中所有点的距离构成高斯分布,其形状由均值μ和标准差σ决定;设点云中的第n个点坐标为pn(xn,yn,zn),该点到任意一点pm(xm,ym,zm)的距离为:计算遍历每个点到任意点之间距离的平均值公式为:标准差为:设标准差倍数为std,输入k和std两个阈值,当某点临近k个点的平均距离在标准范围(μ-σ*std,μ σ*std)内时保留该点,不在该范围内定义为离群点删除;(2)拟合点云平面:在步骤(1)对点云信息进行滤波去噪处理后,加入邻近距离和色度差值两个权重,其中,邻近度是临近距离与中心点云簇的距离;色度差值指的是当前点受噪声影响下的灰度与中心点灰度的差的绝对值;离中心点越近的点,其权重系数越大;在邻域内,灰度值越接近中心点灰度值的点的权重更大,灰度值相差大的点权重越小;两者权重系数相乘,得到最终的卷积模板;权值系数核与图像卷积后高斯函数的数学形式为:其中(xi,yi)为当前点位置,(xc,yc)为中心点的位置,g(xi,yi)为当前点灰度值,g(xc,yc)为中心点灰度值;
而后,即可实现点云平面的拟合过程。6.一种动力电池模组全尺寸检测设备,其特征在于:包括用于输送电池模组的传送带、设于传送带上方的2d相机、设于传送带一侧用于翻转电池模组的机械手、设于传送带上方的光源、两台安装于传送带两侧的3d相机。7.根据权利要求6所述的一种动力电池模组全尺寸检测设备,其特征在于,所述机械手的手部安装有用于识别电池模组的3d相机和用以吸取电池模组的真空吸盘;所述传送带上方设有龙门架,所述龙门架上安装有横向滚珠丝杆滑台,横向滚珠丝杆滑台的滑座上安装有竖向滚珠丝杆滑台,所述2d相机安装于竖向滚珠丝杆滑台的滑座上,竖向滚珠丝杆滑台的滑座两侧分别通过可调灯架连接有所述光源。8.根据权利要求6所述的一种动力电池模组全尺寸检测设备,其特征在于,3d相机采用激光轮廓传感器,2d相机采用ccd相机,还包括与2d相机、3d相机、机械臂、光源连接的工控机,所述工控机内置有能够实现如权利要求1-5任一所述方法的程序。
技术总结
本发明涉及一种动力电池模组全尺寸检测方法及设备。该方法包括以下步骤:对传送带上的电池模组进行采集图片,并传输至工控机进行图像数据分析和处理,所述图像数据分析包括:对光源参数进行综合评价,主要通过复杂光照评测算法计算并反馈,若光照适应性差,则对光源进行角度、位姿和亮度调节并重新评价后再对图像重新采集。所述图像数据处理包括:对模组安装面进行灰度化处理、阈值分割、边缘亚像素提取、拟合边缘得到实际模组长度、宽度和安装孔直径。扫描模组三维点云信息。所述步骤包括:对点云信息进行滤波去噪处理、拟合点云平面,得到模组的实际高度和安装面平面度。本发明具有效率高、精度好等优点,可以满足生产实际需求。可以满足生产实际需求。可以满足生产实际需求。
技术研发人员:彭晋民 汪笑宇 祖一鸣
受保护的技术使用者:福建工程学院
技术研发日:2022.08.05
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。