1.本发明涉及的是一种物理实验领域的技术,具体是一种基于高频闪光源的双相机快速空间轨迹捕获方法。
背景技术:
2.在实际研究中,由于微粒子的尺度小,速度高等特点,其空间轨迹的捕获包括速度测量和运动监测变得很困难。直接光学成像是理解许多复杂高速冲击现象的关键,在微米尺度上,动态过程的成像需要具有微秒甚至更短时间分辨率的超高速成像系统,然而超高速相机与激光器等操作复杂,寻求一种简单实用的快速空间轨迹捕获方法显得尤为重要。
3.现有的粒子图像测速技术利用高速ccd相机作为图像探测设备对颗粒流表面的粒子进行连续拍摄,通过分析图像内颗粒目标提取为点状粒子并进行维诺图构建匹配后得到粒子速度分布信息。但该类技术仅能完成二维平面的成像,速度也是平面内的状态,其捕获图像的能力受到高速ccd相机的帧频限制;此外对多帧图像的处理也需要巨大的工作量。
技术实现要素:
4.本发明针对现有技术对于高速微观尺度粒子速度和运动监测成像技术的不足与限制,提出一种基于高频闪光源的双相机快速空间轨迹捕获方法,通过同步的双相机与光源系统,精确快速完成高速微粒子空间轨迹捕获,能够明确监测高速微观尺度下粒子在碰撞之前的运动状态,对于无针注射、增材制造和空间防护过程的认知与状态调控具有非常重要的意义。
5.本发明是通过以下技术方案实现的:
6.本发明涉及一种基于高频闪光源的双相机快速空间轨迹捕获方法,通过高频频闪光光源在同步的双相机的一个曝光周期内发出多次脉冲闪光,使得采集到的图像上包含高速微粒子被高频光源照亮而捕获的一系列轨迹点,即两个平面轨迹和运动速度,每个轨迹点之间的时间间隔等于频闪光周期,进一步通过对图像进行处理与计算精确获得微粒子的对应的空间轨迹和运动速度。
7.所述的处理,包括:采用灰度变换算法对读取的轨迹点灰度图像进行图像增强处理,提高高速微粒子图像与背景的对比度,更为清晰地展示微粒子的形状轮廓与运动轨迹。
8.所述的计算,包括:读取灰度图像中的轨迹点的亮度曲线,其中:亮度曲线的峰值距离作为相邻周期的粒子运动距离,通过运动距离和周期计算出高速微粒子的一系列运动速度结果,再由矢量计算双相机所成像平面的高速微粒子运动轨迹与速度大小,从而得到高速微粒子的空间轨迹和运动速度。
9.本发明涉及一种实现上述方法的基于高频闪光源的双相机快速空间轨迹捕获系统,包括:高速微粒子发射装置、成像暗场幕布、控制部分、图像采集部分和光源部分,其中:图像采集部分、高速微粒子发射装置、成像暗场幕布和光源部分依次设置,控制部分分别与高速微粒子发射装置、图像采集部分和光源部分相连,实现高速微粒子及相机同步触发、多
路ttl信号光源触发、相机参数设置和运动速度方向分析,即当高速微粒子发射装置释放粒子同时,光源部分进行多次高频照亮微粒子且图像采集部分开始曝光,采集以成像暗场幕布为背景的图像进而进行轨迹点计算得到运动速度方向。
10.所述的系统具体包括:两台工业相机、交换机、信号处理单元、高速微粒子发射装置、电磁阀、同步触发单元、成像暗场幕布、信号发生单元、高频led光源、凸透镜,其中:交换机与两台工业相机连接,在供电的同时传输相机实时采集的图像信息;交换机将采集到的相机图像数据输出到信号处理单元,在信号处理单元端对相机进行参数设置;相机的触发端与同步触发单元连接,同步触发单元同时连接电磁阀完成供电与信号触发,同步触发单元与信号处理单元端连接,提供稳定电源输出的同时进行各路同步信号的触发设置;信号发生单元输出信号触发高频led光源,产生连续的特定周期与脉冲时间的高频光信号,后经凸透镜进行聚光从而增加光强。技术效果
11.本发明能够应用帧率为10fps的普通工业相机,配合高频闪光源实现对高速微米级粒子实现平面内百万帧率的运动成像,最终通过双相机矢量计算得到高速微粒子空间轨迹和运动速度。本发明可捕获的最小粒子直径小于10微米,最大可捕获运动速度超过12km/s。
附图说明
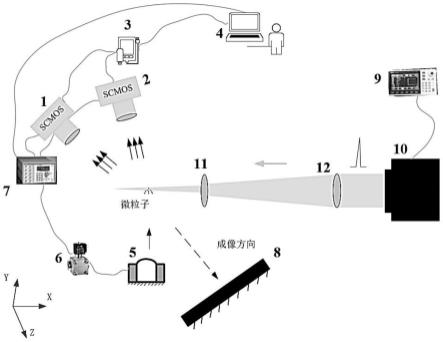
12.图1为本发明示意图;
13.图2为高频led光源电路图;
14.图3为基于一种基于高频闪光源的双相机快速空间轨迹捕获方法原理图;
15.图4为对捕获的运动图像进行读取和标定的示意图;
16.图5为对图像进行处理得到的高速微粒子运动轨迹的亮度值曲线;
17.图6为空间轨迹轨迹的矢量计算原理图;
18.图中:工业相机1、2、交换机3、信号处理单元4、高速微粒子发射装置5、电磁阀6、同步触发单元7、成像暗场幕布8、信号发生单元9、高频led光源10、物镜11、目镜12、控制电路13、led阵列14和散热机构15。
具体实施方式
19.如图1所示,为本实施例涉及一种基于高频闪光源的高速微粒子速度测量方法,包括:两台工业相机1、2、交换机3、信号处理单元4、高速微粒子发射装置5、电磁阀6、同步触发单元7、成像暗场幕布8、信号发生单元9、高频led光源10、物镜11和目镜12,其中:同步触发单元7分别与两台工业相机的触发端和电磁阀6相连实现同步信号触发,同步触发单元7与信号处理单元4相连以传输各路同步信号的触发设置,信号发生单元9输出多路ttl信号触发高频led光源10以产生连续的特定周期与脉冲时间的高频光,高频光经物镜11和目镜12聚光后照射至高速微粒子发射装置5释放出的微粒子上,工业相机1与工业相机2以成像暗场幕布8为背景采集实时图像,并通过交换机2将图像数据输出至信号处理单元3的同时接收信号处理单元3对工业相机1和工业相机2的设置参数。
20.所述的成像暗场幕布8为全黑覆盖整个相机视场,能够在阻挡背景光的同时,保证
微粒子成像轨迹点与背景直接有足够的对比度,使得高速微粒子运动轨迹点图像更为清晰。
21.如图2所示,所述的高频led光源10包括:控制电路13和与之相连的led阵列14,其中:控制电路13采集多路ttl信号后输出启动脉冲至led阵列14以产生高频的频闪光源。
22.所述的控制电路13包括:数字比较器、mos开关和储能电容,其中:外接电源与数字比较器连接,数字比较器与储能电容连接,储能电容再与mos开关连接。
23.所述的led阵列14采用多led光源矩阵排列,提供高速微粒子运动成像所需的光强。
24.如图3所示,在一个工业相机的曝光时间内,包含多个入射光源的脉冲,此时在相机的每一帧图像上都有高速微粒子被高频光源照亮而捕获的一系列轨迹点,轨迹点之间的时间间隔等于频闪光周期。图中脉宽是指:高频光的每个输出周期内触发光源点亮的脉冲持续时间;时间脉冲是指:两台工业相机1和2的周期和曝光时间的演化关系,其中曝光时间与帧间时间的和为相机每帧图像之间的周期,其中t与t1的和是光源的频闪周期,t2作为相机曝光时间需要容纳多个频闪光周期,完成同一帧图像上对粒子的多次成像。
25.所述的信号处理单元4包括:相机设置模块、相机与微粒子发射装置电磁阀同步触发模块、图像增强处理模块、运动灰度图像读取与处理计算模块,其中:相机设置模块根据微粒子大小和速度区间进行帧率、周期、增益、图片类型、拍照时间、存储路径和触发方式等设置,确保相机以最合适设置来完成图像捕获。相机与微粒子发射装置电磁阀模块根据相机的延迟来设置相机与电磁阀的触发时间间隔,确保微粒子运动到相机视场时完成图像的捕获。图像增强处理模块对相机捕获的图像,应用图像增强算法完成图像对比度的提升处理,得到更为清晰的微粒子轮廓及其运动轨迹结果。运动灰度图像读取与处理计算模块根据图像增强处理中的微粒子轨迹,进行灰度图像读取,得到微粒子运动轨迹上的亮度曲线,曲线峰值之间的距离即为微粒子在一个频闪周期内的运动距离,据此计算得到微粒子的运动速度大小。
26.本实施例涉及一种基于上述系统的高速微粒子运动监测成像方法,包括:
27.步骤一,在信号处理单元上设置相机和同步触发单元参数和触发条件。需要相机根据高速微粒子的状态来调整对应的成像参数,实现尽可能清晰的轨迹捕获,同时设置相机的触发条件,与同步触发单元的输出信号对应以便完成相机触发。另外,需要对同步触发单元进行设置,分别设置相机和电磁阀的触发时间。
28.步骤二,信号发生单元设置目标高频光源脉冲参数。需要根据目标靶体的速度与尺寸,设置合理的光源脉冲周期与脉宽,脉冲周期保障粒子轨迹点之间的距离合适,脉宽保障相机成像过程中脉冲光光源的光强。
29.步骤三,相机对焦与光源聚光。光源通过凸透镜进行聚光,使得最终最强的光源汇聚点正好位于高速微粒子飞出的位置。这样能够在高速微粒子飞出时提供足够的成像光强。同时,相机需要完成对焦,焦点汇聚在高速微粒子飞出的平面内,此时光源也最强。并且不止成像暗场背景幕布,减少成像的噪点。
30.步骤四,微粒子发射装置具备状态。采用自研的微粒子发射装置,设置合理的发射动力源。此外,通过显微操作放置目标微粒子到发射装置的对应位置。最后,控制微粒子发射装置启动的电磁阀与同步触发单元连接,完成微粒子发射装置状态准备。
31.步骤五,在信号处理单元端点击启动开始实验。当信号处理单元端给同步触发单元启动信号后,输出信号触发电磁阀,微粒子发射装置加速粒子,此时粒子被光路中的高频光源照亮,同时同步触发单元输出信号,触发相机在成像暗场幕布背景下完成成像,相机图像数据同步存储于信号处理单元端,得到微粒子的运动轨迹图像,如图4所示。
32.步骤六,对两台工业相机捕获的高速微粒子图像应用图像增强算法完成图像对比度的提升处理,得到更为清晰的微粒子轮廓及其运动轨迹结果。再通过运动灰度图像读取与处理计算模块根据图像增强处理中的微粒子轨迹,进行灰度图像读取,得到微粒子平面内运动轨迹上的亮度曲线,如图5所示。亮度曲线峰值之间的距离即轨迹点之间的距离,通过尺寸标定得到对应的运动距离,如图4所示。曲线峰值之间的距离即为微粒子在一个频闪周期内的运动距离,据此计算得到平面内高速微粒子的运动速度大小。
33.步骤七,通过矢量计算双相机所成像平面的高速微粒子运动轨迹与速度大小,得到高速微粒子的空间轨迹和运动速度,空间轨迹轨迹的矢量计算原理图如图6所示。最后便得到高速微粒子空间轨迹和各轨迹点之间的运动速度,完成微粒子运动状态的监测。
34.经过具体实际实验,对粒径尺寸为0.5mm的304不锈钢粒子,相机参数帧率设置为10fps,光源的脉冲周期设置为5微秒,脉宽为500纳秒,经微粒子发射装置加速后的粒子被相机捕捉到的微粒子运动图像如图4(c)所示,经过图像处理得到图5中的亮度曲线。通过图4(a)对相机视场进行标定进而得到像素尺寸与实际尺寸的对应关系。其后根据运动距离与时间计算得到轨迹点之间微粒子的运动速度。最后可以对另一相机的平面内高速微粒子轨迹重复上述步骤得到另一成像平面的运动速度,完成微粒子运动状态的监测。
35.与现有技术相比,本发明基于驱动电路与led光源矩阵完成高频光源输出,配合帧频为10fps的两个普通工业相机完成了对高速微粒子的高帧频空间轨迹成像,理论最大帧率可高达一百万帧,最小可监测粒子粒径小于10微米,对10微米粒子可监测到的最高速度可达到12km/s。
36.通过现有光源及其驱动电路设计,高频光源电路输出脉冲周期最低可达1微秒,最高完成频闪光频率为一百万赫兹的光脉冲。配合弱光性能良好的低帧频工业相机,可以实现99.5%成像占空比。前述相机通过高频闪光源来切割相机的低帧率图像,在保证几乎完整记录微粒子运动轨迹(99.5%)的同时实现图像的一百万帧实际成像帧频,即理论上一秒钟内得到一百万个微粒子轨迹点图像。这不仅降低了实验中对相机和光源的性能参数要求,同时将光源与相机的协同工作模式中对相机参数的要求转移到对光源的要求上,大大简化了操作。
37.上述具体实施可由本领域技术人员在不背离本发明原理和宗旨的前提下以不同的方式对其进行局部调整,本发明的保护范围以权利要求书为准且不由上述具体实施所限,在其范围内的各个实现方案均受本发明之约束。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。