技术特征:
1.一种大气环境污染源污染程度评估方法,其特征在于,包括:获得污染监测数据;所述污染监测数据为固定时间间隔测量得到的污染数据;获得多张污染监测图像;所述污染监测图像为监控设备所拍摄的污染源排放废气的图像;将多张污染监测图像输入污染情况突变检测网络,判断是否出现污染情况突然变化;若出现污染情况突然变化,标记变化信息,记录变化时间;基于多张污染监测图像,得到污染信息;所述污染信息包括污染范围值和污染程度值;基于所述污染监测数据、污染信息和变化时间,通过污染检测网络,得到污染程度。2.根据权利要求1所述的一种大气环境污染源污染程度评估方法,其特征在于,所述将多张污染监测图像输入污染情况突变检测网络,判断是否出现污染情况突然变化,包括:获得第一污染监测图像;所述第一污染监测图像为多张污染监测图像中的图像;获得第二污染监测图像;所述第二污染监测图像为多张污染监测图像中距离第一污染监测图像的时间间隔最短且监测时间点在第一污染监测图像之后的图像;将所述第一污染监测图像和第二污染监测图像,分别输入污染情况突变检测网络,得到第一污染特征图和第二污染特征图;第一污染特征图对应第一污染监测图像;第二污染特征图对应第二污染监测图像;基于所述第一污染监测图像和第二污染监测图像,将所述第一污染特征图和第二污染特征图进行比较,判断是否出现污染情况突然变化。3.根据权利要求2所述的一种大气环境污染源污染程度评估方法,其特征在于,所述基于所述第一污染监测图像和第二污染监测图像,将所述第一污染特征图和第二污染特征图进行比较,判断是否出现污染情况突然变化,包括:基于所述第一污染监测图像、第一污染特征图和第二污染特征图,得到第一烟雾区域;所述第一烟雾区域表示烟雾在第一污染监测图像中的位置;基于所述第二污染监测图像、第一污染特征图和第二污染特征图,得到第二烟雾区域;所述第二烟雾区域表示烟雾在第二污染监测图像中的位置;基于所述第一污染监测图像、第二污染监测图像、第一烟雾区域和第二烟雾区域,得到废气排放差值;所述废气排放差值表示第一污染监测图像和第二污染监测图像中排放气体的相差程度;若废气排放差值大于污染变化阈值,出现污染情况突然变化;若废气排放差值小于或等于污染变化阈值,未出现污染情况突然变化。4.根据权利要求3所述的一种大气环境污染源污染程度评估方法,其特征在于,所述基于所述第一污染监测图像、第二污染监测图像、第一烟雾区域和第二烟雾区域得到第一烟雾区域,包括:获得背景灰度图像;所述背景灰度图像表示监控设备没有烟雾时的灰度图像;将所述第一污染监测图像,进行灰度化,得到第一污染灰度图像;将第一污染灰度图像中的值减去背景灰度图像中的值,得到第一污染灰度差图像;将第一污染灰度差图像中小于灰度阈值的值设为0,得到第一灰度烟雾图像;基于第一灰度烟雾图像、第一污染监测图像、第一污染特征图和第二污染特征图,确认第一灰度烟雾图像是否存在烟雾区域;
若第一灰度烟雾图像存在烟雾区域,将第一灰度烟雾图像中大于0的区域作为第一烟雾区域。5.根据权利要求4所述的一种大气环境污染源污染程度评估方法,其特征在于,所述基于第一灰度烟雾图像、第一污染监测图像、第一污染特征图和第二污染特征图,确认第一灰度烟雾图像是否存在烟雾区域,包括:获得第一污染特征区域;所述第一污染特征区域为第一灰度烟雾图像的边界在第一污染特征图中对应的位置;获得多个污染特征向量;所述污染特征向量表示第一污染特征图中第一污染特征区域所在位置的特征向量;获得第一污染特征向量;所述第一污染特征向量为多个污染特征向量中其中一个污染特征向量;获得多个周围污染特征向量;所述周围污染特征向量表示以第一污染特征向量为中心周围8个位置中的污染特征向量;将第一污染特征向量和多个周围污染特征向量,求取平均值,得到融合特征向量;基于第二污染特征图、第一污染特征向量和融合特征向量,确认第一灰度烟雾图像是否存在烟雾区域。6.根据权利要求5所述的一种大气环境污染源污染程度评估方法,其特征在于,所述基于第二污染特征图、第一污染特征向量和融合特征向量,确认第一灰度烟雾图像是否存在烟雾区域,包括:获得第二污染特征向量;所述第二污染特征向量为第二污染特征图中第一污染特征向量对应位置的特征向量;获得多个检测周围污染特征向量;所述检测周围污染特征向量为第二污染特征向量为中心且不属于烟雾区域的向量;将第一污染特征向量与检测周围污染特征向量相减,得到周围差向量;多个检测周围污染特征向量对应得到多个周围差向量;一个周围差向量对应一个检测周围污染特征向量;每个周围差向量中有多个向量值;针对每个周围差向量,求取周围差向量中每个向量值的平方,获得平方值,多个向量值对应获得多个平方值;对多个平方值进行求和,得到求和平方值;求取求和平方值的算数平方根,以算数平方根作为周围差值;每个周围差向量对应获得一个周围差值,多个周围差向量对应获得多个周围差值;若周围差值小于周围差阈值,确认第一灰度烟雾图像存在烟雾区域。7.根据权利要求3所述的一种大气环境污染源污染程度评估方法,其特征在于,所述基于所述第一污染监测图像、第二污染监测图像、第一烟雾区域和第二烟雾区域,得到废气排放差值,包括:将所述第一烟雾区域和第二烟雾区域进行合并,得到合并烟雾区域;所述合并烟雾区域表示同时含有第一污染区域和第二污染区域的区域;将第一污染监测图像中合并烟雾区域外的rgb值设为0,得到第一背景污染图像;将第二污染监测图像中合并烟雾区域外的rgb值设为0,得到第二背景污染图像;将第一背景污染图像,转化为hsv,得到第一hsv背景污染图像;将第二背景污染图像,转化为hsv,得到第二hsv背景污染图像;
获得颜色差图像;所述颜色差图像为多个背景污染差值的绝对值构成的图像;所述背景污染差值为第一hsv背景污染图像中值减去第二hsv背景污染图像对应位置中值的值;将颜色差图像转化为rgb,并进行灰度化,得到灰度差图像;将灰度差图像中的灰度值进行归一化,得到废气排放差值。8.根据权利要求6所述的一种大气环境污染源污染程度评估方法,其特征在于,所述基于所述污染监测数据、污染信息和变化时间,通过污染检测网络,得到污染程度,包括:将污染监测数据和污染信息,输入第一污染检测网络,得到初次评估程度;多个污染信息对应获得多个初次评估程度;若污染信息为标记变化,在时间结构记录下第一变化时间,将污染信息进行顺移,重复判断标记变化情况,直到污染信息再次为标记变化;若污染信息再次为标记变化,在时间结构记录下第二变化时间,将污染监测数据和多个污染信息输入污染检测网络,得到多个二次评估程度;将所述污染监测数据、污染信息、第一变化时间和第二变化时间,输入第二污染检测网络,得到整体污染程度;将局部污染程度和整体污染程度求平均值后向上取整,得到污染程度。9.根据权利要求8所述的一种大气环境污染源污染程度评估方法,其特征在于,所述将所述污染监测数据、污染信息、第一变化时间和第二变化时间,输入第二污染检测网络,得到整体污染程度,包括:将第二变化时间减去第一变化时间,得到监测时间;所述监测时间为两个变化时间点之间的时间;将多个污染范围值相加,得到总污染范围值;将多个污染程度值相加,得到总污染程度值;将污染监测数据、总污染范围值、总污染程度值和监测时间,输入污染检测网络,得到整体污染程度。10.一种大气环境污染源污染程度评估系统,其特征在于,包括:获取模块:获得污染监测数据;所述污染监测数据为固定时间间隔测量得到的污染数据;获得多张污染监测图像;所述污染监测图像为监控设备所拍摄的污染源排放废气的图像;突变监测模块:将多张污染监测图像输入污染情况突变检测网络,判断是否出现污染情况突然变化;标记模块:若出现污染情况突然变化,标记变化信息,记录变化时间;污染检测模块:基于多张污染监测图像,得到污染信息;所述污染信息包括污染范围值和污染程度值;污染程度评估模块:基于所述污染监测数据、污染信息和变化时间,通过污染检测网络,得到污染程度。
技术总结
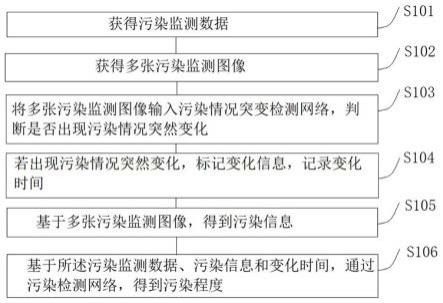
本发明公开了一种大气环境污染源污染程度评估方法及系统,涉及图像处理技术领域。获得污染监测数据。获得多张污染监测图像。通过多次将多张污染监测图像,输入污染检测网络,判断是否出现污染情况突然变化。若出现污染情况突然变化,记录变化时间。基于多张污染监测图像,得到污染信息。基于污染监测数据、污染信息和变化时间,通过污染检测网络得到污染程度。实时监测结合普通监测数据进行评估。先检测烟雾突变,判断是否控制废气排放。用相邻两张图像中的运动情况判断监测到的是否为烟雾。分别计算污染监测图像的局部污染情况。将突变时间长度作为神经网络其中一个输入得到整体污染程度。结合局部和整体,更加准确的得到评估的污染程度。估的污染程度。估的污染程度。
技术研发人员:曲凯 张淼 周洁 张翼翔 马君秀 刘华清 马振国
受保护的技术使用者:北京中科三清环境技术有限公司
技术研发日:2022.10.21
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。