1.本发明涉及多普勒差分干涉仪,具体涉及一种基于光机热集成分析的干涉仪热稳定性优化方法。
背景技术:
2.多普勒差分干涉仪是一种新型的大气风场被动探测技术,现有多普勒差分干涉仪结构如图1所示,包括分光棱镜01、短臂视场棱镜支撑元件11、短臂视场棱镜12、短臂光栅支撑元件13、短臂光栅14、长臂视场棱镜支撑元件21、长臂视场棱镜22、长臂光栅支撑元件23、长臂光栅24;光线经过分光棱镜01的分光面后形成两路相干光,干涉仪两臂的结构参数不一样,光路经过干涉仪两臂的光程不一样,引入基础光程差用来提高探测灵敏度。干涉仪短臂的光路依次经过分光棱镜01短臂表面、短臂视场棱镜12前表面、短臂视场棱镜12后表面、短臂光栅14表面,再依次返回到分光棱镜01;干涉仪长臂的光路依次经过分光棱镜01长臂表面、长臂视场棱镜22前表面、长臂视场棱镜22后表面、长臂光栅24表面,再依次返回到分光棱镜01;因此,多普勒差分干涉仪两臂非共用的光学面共包括八个光学面,分别为分光棱镜01短臂表面、短臂视场棱镜12前表面、短臂视场棱镜12后表面、短臂光栅14表面、分光棱镜01长臂表面、长臂视场棱镜22前表面、长臂视场棱镜22后表面、长臂光栅24表面。
3.多普勒差分干涉对温度变化极为敏感,整体式多普勒差分干涉仪将各光学元件通过支撑元件粘接成一个整体,经过热补偿设计选择合适的元件材料和尺寸,可使干涉仪具有高热稳定性。
4.经过热补偿后的多普勒差分干涉仪各光学元件间的材料膨胀系数差异较大,各元件粘接在一起相互约束,温度变化时各元件产生热变形,但实验中测试得到的干涉仪实际相位热漂移大于理论设计值。这是由于热补偿设计时,考虑的是理想热变形,即温度变化时只会引起元件尺寸变化,但实际热变形时光学面的面型变差、光学面发生旋转和位移、光学面之间的相互位置关系与理想热变形的差异较大,且两臂的结构不对称不能相互抵消,造成多普勒差分干涉仪两臂之间的基准光程差发生变化。多普勒差分干涉仪利用干涉图的相位反演计算大气风场速度,干涉仪基准光程差变化会给采集到的干涉图引入相位误差,使干涉仪的测风精度降低。
技术实现要素:
5.本发明的目的是解决现有多普勒差分干涉仪在热补偿设计时仅考虑理想热变形,未考虑实际热变形所造成的多普勒差分干涉仪两臂之间基准光程差的变化,导致实际相位热漂移大于理论设计值,进而造成多普勒差分干涉仪测风精度降低的不足之处,而提供一种基于光机热集成分析的干涉仪热稳定性优化方法。
6.为了解决上述现有技术所存在的不足之处,本发明提供了如下技术解决方案:一种基于光机热集成分析的干涉仪热稳定性优化方法,其特殊之处在于,包括如下步骤:
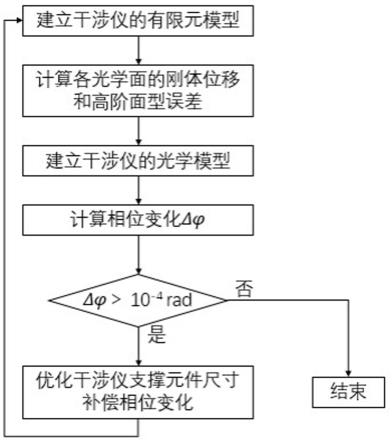
步骤1、建立干涉仪的有限元模型;在有限元软件中建立干涉仪的有限元模型,各元件对应3d单元大小为1-5mm,光学元件和间隔元件之间用粘接单元连接,约束位置设在分光棱镜中心;并在各元件的通光区域内提取多个2d单元,并根据对应元件设置各2d单元的材料;多个2d单元厚度均为0.001-0.01mm;建立完成后,对有限元模型输入载荷,计算载荷条件下干涉仪的变形情况;所述载荷为温度载荷和/或力学载荷;步骤2、计算各光学面的刚体位移和高阶面型误差;在步骤1所建立的有限元模型的各光学面上建立坐标系;在温度升温1℃后的有限元模型热变形结果中,分别在各光学面的坐标系下提取该光学面2d单元的节点位移,对该光学面的节点位移进行泽尼克多项式拟合,进而计算该光学面的刚体位移和高阶面型误差;步骤3、建立干涉仪的光学模型;步骤3.1、在光学软件中建立光学模型,在光学模型中各光学面分别设置泽尼克透镜,且令泽尼克系数为0;输入初始温度、光学模型的折射率与温度的对应关系,以及初始条件下的短臂光栅密度、长臂光栅密度,仿真获得探测波长下初始干涉图;步骤3.2、在载荷条件下,改变光学模型的温度,并将步骤2各光学面拟合的泽尼克多项式导入光学模型中对应的泽尼克面上,用来修正对应光学面变形;根据短臂光栅热膨胀系数、长臂光栅热膨胀系数,计算温度变化后的对应光栅刻槽密度,用以修正光栅刻槽密度变化,即完成载荷条件下的光学模型修正;通过修正后的光学模型仿真获得探测波长下变形后干涉图;步骤4、根据步骤3.1所获得的初始干涉图中的干涉条纹、步骤3.2所获得的变形后干涉图中的干涉条纹,分别计算初始中心相位、变形后中心相位;获得变形后中心相位与初始中心相位之差即为对应载荷条件下的相位变化 ;若相位变化大于10-4 rad,则执行步骤5,否则完成干涉仪热稳定性优化,结束流程;步骤5、优化干涉仪支撑元件尺寸补偿相位变化;在不改变基础光程差的条件下,更改短臂视场棱镜支撑元件和长臂视场棱镜支撑元件的尺寸,以消除干涉仪相位热漂移;根据步骤4所得的相位变化,计算短臂视场棱镜支撑元件中心厚度和长臂视场棱镜支撑元件中心厚度同时增加或减少的量;根据对短臂视场棱镜支撑元件中心厚度和长臂视场棱镜支撑元件中心厚度进行调整,返回步骤1。
7.进一步地,步骤2中,所述在步骤1所建立的有限元模型的各光学面上建立坐标系具体为:坐标系的原点在主光线与该光学面的交点处,x轴为竖直方向, z轴为每个光学面的法线方向,x轴正方向为竖直向下,z轴正方向由棱镜内部指向外部或由光栅外部指向内部,y轴正方向根据右手定则判断。
8.进一步地,步骤3.1中,所述在光学模型中各光学面分别设置泽尼克透镜具体为:在分光棱镜短臂表面、短臂视场棱镜前表面、短臂视场棱镜后表面、分光棱镜长臂表面、长臂视场棱镜前表面、长臂视场棱镜后表面上设置泽尼克透镜,透镜厚度0.001-0.01mm,要求泽尼克透镜厚度大于光学面的变形量,干涉仪两臂的每个面的厚度一致不会引入干涉仪光程差变化;
在短臂光栅表面、长臂光栅表面加入折射率为2的泽尼克透镜,且泽尼克透镜与短臂光栅表面、长臂光栅表面分别留有0.001-0.01mm的间隙,泽尼克透镜的泽尼克面朝向对应光栅表面,用来模拟光栅面热变形对光程差的影响。
9.进一步地,所述步骤4具体为:所述初始中心相位、变形后中心相位计算方法如下:首先对对应干涉图的实条纹数据进行傅里叶变换变换至频域,在频域提取特征峰得到目标谱,再对目标谱进行傅里叶逆变换得到复干涉图,计算复干涉图中的像元在一个条纹内的辐角获取对应相位:其中代表复干涉图的虚部,代表复干涉图的实部;每个条纹对应一个周期,选定复干涉图左边亮的中心条纹的相位为初始相位,向右k个条纹时相位叠加为 ;根据条纹数和图像中心像元所在的条纹中对应相位即可获得中心相位;计算得到初始中心相位、变形后中心相位,得到对应载荷条件下的相位变化。
10.进一步地,所述步骤5具体为:依据下式计算短臂视场棱镜支撑元件中心厚度和长臂视场棱镜支撑元件中心厚度同时增加或减少的量;其中:c为常数,;为短臂视场棱镜支撑元件原材料的热膨胀系数,为长臂视场棱镜支撑元件原材料的热膨胀系数;和分别为短臂视场棱镜支撑元件中心厚度、长臂视场棱镜支撑元件中心厚度;为干涉仪基准光程差的变化量,;为干涉仪探测波长;为短臂视场棱镜支撑元件所更换的材料的热膨胀系数。
11.进一步地,步骤2中,所述泽尼克多项式如下:其中表示光学面变形量,ρ是光学面的归一化半径,
ꢀꢀ
是方位角,和分别是x和y方向上的泽尼克系数,为x方向上径向波数、环向波数均为0的泽尼克系数, 为x方向上环向波数为0的泽尼克系数;和分别是径向和环向的波数,为泽尼克多项式的径向关系式;
。
12.进一步地,步骤2中,所述刚体位移包括沿x轴、y轴、z轴方向的位移和绕x轴、y轴、z轴的旋转角度,所述高阶面型误差包括rms、pv。
13.进一步地,步骤3.2中,所述光栅刻槽密度,其中为光栅刻线的间隔, 为热膨胀系数,为温度变化量。
14.与现有技术相比,本发明的有益效果是:(1)本发明一种基于光机热集成分析的干涉仪热稳定性优化方法,通过有限元分析结合泽尼克多项式仿真得到各光学面的刚体位移和高阶面型误差,并通过在光学模型中各光学面分别设置泽尼克透镜仿真得到热变形后的相位变化,并进一步更改短臂视场棱镜支撑元件、长臂视场棱镜支撑元件的中心厚度,以消除干涉仪相位热漂移,使得整体式多普勒差分干涉仪热变形后基准光程差保持不变,从而提高了干涉仪的测风精度。
15.(2)本发明一种基于光机热集成分析的干涉仪热稳定性优化方法,通过在多普勒差分干涉仪的光学模型中加入泽尼克透镜,用泽尼克多项式来修正光学面的热变形,可以在光学模型中全面表达热变形后光学面的刚体位移和高阶面型误差,使相位仿真计算更准确。
16.(3)本发明一种基于光机热集成分析的干涉仪热稳定性优化方法,使得干涉仪的基准光程差对温度不敏感,干涉仪的测量基准稳定,并可以减小对干涉仪的温控要求,使干涉仪的测风精度显著提高。
附图说明
17.图1为一种现有多普勒差分干涉仪的结构示意图;图2为本发明一种基于光机热集成分析的干涉仪热稳定性优化方法的流程图;图3为本发明的有限元模型升温1℃时的热变形云图;图4为本发明的有限元模型升温1℃时的热变形趋势图;图5为本发明的步骤3所建立的光学模型的示意图。
18.附图标记说明如下:01-分光棱镜;11-短臂视场棱镜支撑元件;12-短臂视场棱镜;13-短臂光栅支撑元件;14-短臂光栅;21-长臂视场棱镜支撑元件;22-长臂视场棱镜;23-长臂光栅支撑元件;24-长臂光栅。
具体实施方式
19.下面结合附图和示例性实施例对本发明作进一步地说明。
20.参照图2,一种基于光机热集成分析的干涉仪热稳定性优化方法,包括如下步骤:步骤1、建立干涉仪的有限元模型;在有限元软件中建立干涉仪的有限元模型,各元件对应3d单元大小为1-5mm,光学元件和间隔元件之间用粘接单元连接,约束位置设在分光棱镜(01)中心;并在各元件的通光区域内提取多个2d单元,并根据对应元件设置各2d单元的材料,以建立干涉仪的有限元模型,如表1所示;多个2d单元厚度均为0.001mm,该厚度不影响干涉仪变形精度;
表1建立完成后,对有限元模型输入载荷,计算载荷条件下干涉仪的变形情况;所述载荷为温度载荷和/或力学载荷;温度载荷如均匀温度、非均匀温度场等,力学载荷如重力、压强、外力等;步骤2、计算各光学面的刚体位移和高阶面型误差;在步骤1所建立的有限元模型的各光学面上建立坐标系,坐标系的原点在主光线与该光学面的交点处,x轴为竖直方向,y轴为水平方向,z轴为每个光学面的法线方向,x轴正方向为竖直向下,z轴正方向由棱镜内部指向外部或由光栅外部指向内部,y轴正方向根据右手定则判断;在温度升温1℃后的有限元模型热变形结果中,分别在各光学面的坐标系下提取该光学面2d单元的节点位移,对该光学面的节点位移进行泽尼克多项式拟合,进而计算该光学面的刚体位移和高阶面型误差;所述刚体位移包括沿x轴、y轴、z轴方向的位移和绕x轴、y轴、z轴的旋转角度,所述高阶面型误差包括rms(均方根值)、pv(最大变化值减去最小变化值,峰峰值);所述泽尼克多项式如下:其中表示光学面变形,ρ是光学面的归一化半径, 是方位角, 和分别是x和y方向上的泽尼克系数,为x方向上径向波数、环向波数均为0的泽尼克系数,为x方向上环向波数为0的泽尼克系数,和分别是径向和环向的波数,为泽尼克多项式的径向关系式;
;温度升高1℃时各光学面的法向位移(沿z轴方向的位移)、方位旋转(绕z轴的旋转角度)、rms、pv如表2所示;表2温度升高1℃时各光学面的热变形趋势如图3、图4所示,图中各元件旁边的箭头代表其位移变化,短臂视场棱镜12、长臂视场棱镜22内部箭头代表其实际厚度的变化,凹凸表示光学面的变形方向;由图4可以看出短臂和长臂变形趋势不一致,且不能相互抵消,导致干涉仪两臂的基准光程差发生变化,引起相位误差;步骤3、建立干涉仪的光学模型;步骤3.1、在光学软件中建立光学模型,如图5所示,并在分光棱镜01短臂表面、短臂视场棱镜12前表面、短臂视场棱镜12后表面、分光棱镜01长臂表面、长臂视场棱镜22前表面、长臂视场棱镜22后表面上设置泽尼克透镜,泽尼克透镜厚度0.001mm,要求透镜厚度大于光学面的变形量,干涉仪两臂的每个面的厚度一致不会引入干涉仪光程差变化;在短臂光栅14表面、长臂光栅24表面加入折射率为2的泽尼克透镜,且泽尼克透镜与短臂光栅14表面、长臂光栅24表面分别留有0.001-0.01mm的间隙,泽尼克透镜的泽尼克面朝向对应光栅表面,用来模拟光栅面热变形对光程差的影响;例如,光栅表面局部凸出0.001mm,泽尼克透镜的背面在相应位置向内凹陷0.001mm;泽尼克透镜的光程减少0.002mm,间隙的光程增加0.001mm,最终光程减小0.001mm,这与光栅表面带来的光程差变化是一致的;令上述泽尼克透镜的泽尼克系数均为0;输入初始温度、光学模型的折射率与温度的对应关系,以及初始条件下的短臂光栅14密度、长臂光栅24密度,仿真获得探测波长的初始干涉图;
步骤3.2、在载荷条件下,改变光学模型的温度,并再将步骤2各光学面拟合的泽尼克多项式导入光学模型中对应的泽尼克面上,用来修正对应光学面变形;再根据短臂光栅14热膨胀系数、长臂光栅24热膨胀系数,计算温度变化后的对应光栅刻槽密度,用以修正光栅刻槽密度变化,即完成载荷条件下的光学模型修正;所述光栅刻槽密度,其中为光栅刻线的间隔,为热膨胀系数,为温度变化量;通过修正后的光学模型仿真探测波长的变形后干涉图;步骤4、根据步骤3.1所获得的初始干涉图中的干涉条纹,计算初始中心相位;根据步骤3.2所获得的变形后干涉图中的干涉条纹,计算变形后中心相位;获得变形后中心相位与初始中心相位之差即为对应载荷条件下的相位变化;所述初始中心相位、变形后中心相位计算方法如下:首先对对应干涉图的实条纹数据进行傅里叶变换变换至频域,在频域提取特征峰得到目标谱,再对目标谱进行傅里叶逆变换得到复干涉图,计算复干涉图中的像元在一个条纹内的辐角获取对应相位:其中代表复干涉图的虚部,代表复干涉图的实部;每个条纹对应一个周期,选定复干涉图左边亮的中心条纹的相位为初始相位,向右k个条纹时相位叠加为 ;根据条纹数和图像中心像元所在的条纹中对应相位即可获得中心相位;计算得到初始中心相位、变形后中心相位,得到对应载荷条件下的相位变化;若相位变化大于10-4 rad,则执行步骤5,否则完成干涉仪热稳定性优化,结束流程;本实施例中,对应载荷条件下的相位变化,因此执行步骤5;步骤5、优化干涉仪支撑元件尺寸补偿相位变化;在不改变基础光程差的条件下,为了消除干涉仪相位热漂移,可更改短臂视场棱镜支撑元件11和长臂视场棱镜支撑元件21中心的尺寸,在其他实施例中也可同时更换短臂视场棱镜支撑元件11的材料;根据步骤4所得的相位变化 ,计算短臂视场棱镜支撑元件11中心厚度和长臂视场棱镜支撑元件21中心厚度同时增加或减少的量;根据对短臂视场棱镜支撑元件11中心厚度和长臂视场棱镜支撑元件21中心厚度进行调整,返回步骤1; 的计算方法具体为:其中:c为常数,;为短臂视场棱镜支撑元件11原材料的热膨胀系数,为长臂视场棱镜支撑元件21原材料的热膨胀系数;和分别为短臂视场棱镜支撑元件11
中心厚度、长臂视场棱镜支撑元件21中心厚度, 为分光棱镜01到长臂光栅24的单程光程与分光棱镜01到短臂光栅14的单程光程之差的变化量,即干涉仪基准光程差的变化量, 为干涉仪探测波长; 为短臂视场棱镜支撑元件11所更换的材料的热膨胀系数;本实施例中,;根据公式计算,即短臂视场棱镜支撑元件中心11厚度、长臂视场棱镜支撑元件21中心厚度同时增加1.596mm;对短臂视场棱镜支撑元件11中心厚度和长臂视场棱镜支撑元件21中心厚度进行调整后,返回步骤1,相同的载荷条件下重新计算相位变化为0.0032rad,相位变化显著降低;继续补偿措施为短臂视场棱镜支撑元件11中心厚度、长臂视场棱镜支撑元件21中心厚度同时再增加0.012mm,对短臂视场棱镜支撑元件11中心厚度和长臂视场棱镜支撑元件21中心厚度进行调整后,返回步骤4,相同的载荷条件下重新计算相位变化为-4.10
×
10-5
rad,即完成干涉仪热稳定性优化。
21.以上实施例仅用以说明本发明的技术方案,而非对其限制,对于本领域的普通专业技术人员来说,可以对前述各实施例所记载的具体技术方案进行修改,或者对其中部分技术特征进行等同替换,而这些修改或者替换,并不使相应技术方案的本质脱离本发明所保护技术方案的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。