1.本发明涉及数字处理技术领域,具体涉及一种基于机器视觉的图像特征处理方法及系统。
背景技术:
2.随着计算机科学、多媒体及通信技术的不断发展,极大程度的推动了图像特征处理的发展,图像特征的处理应用于自动驾驶、机器导航、目标追踪等多方面,现阶段,为保证图像特征处理准确度,需要进行大量的运算,在图像特征处理系统算力有限的情况,无法保障图像特征处理准确度。
3.现有技术中存在图像特征处理准确度低,导致图像特征处理结果与图像特征处理系统的特征功能的适配度低的技术问题。
技术实现要素:
4.本技术通过提供了一种基于机器视觉的图像特征处理方法及系统,解决了图像特征处理准确度低,导致图像特征处理结果与图像特征处理系统的特征功能的适配度低的技术问题,达到了进行灰度匹配,进行分区处理,提高图像特征处理准确度,针对特征功能,匹配确定图像特征处理结果,提高特征功能图像特征处理结果适配度的技术效果。
5.鉴于上述问题,本技术提供了一种基于机器视觉的图像特征处理方法及系统。
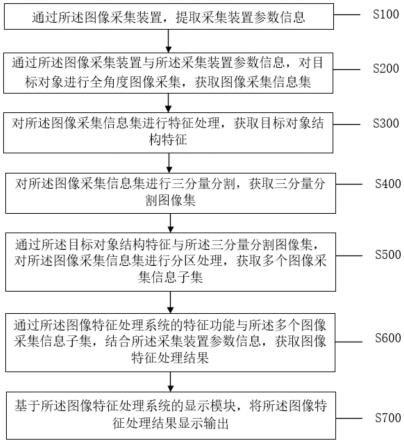
6.本技术的第一个方面,提供了一种基于机器视觉的图像特征处理方法,其中,所述方法应用于图像特征处理系统,所述系统与图像采集装置通信连接,所述方法包括:通过所述图像采集装置,提取采集装置参数信息;通过所述图像采集装置与所述采集装置参数信息,对目标对象进行全角度图像采集,获取图像采集信息集;对所述图像采集信息集进行特征处理,获取目标对象结构特征;对所述图像采集信息集进行三分量分割,获取三分量分割图像集;通过所述目标对象结构特征与所述三分量分割图像集,对所述图像采集信息集进行分区处理,获取多个图像采集信息子集;通过所述图像特征处理系统的特征功能与所述多个图像采集信息子集,结合所述采集装置参数信息,获取图像特征处理结果;基于所述图像特征处理系统的显示模块,将所述图像特征处理结果显示输出。
7.本技术的第二个方面,提供了一种基于机器视觉的图像特征处理系统,其中,所述系统包括:参数提取单元,所述参数提取单元用于通过图像采集装置,提取采集装置参数信息;全角度采集单元,所述全角度采集单元用于通过所述图像采集装置与所述采集装置参数信息,对目标对象进行全角度图像采集,获取图像采集信息集;结构特征获取单元,所述结构特征获取单元用于对所述图像采集信息集进行特征处理,获取目标对象结构特征;三分量分割单元,所述三分量分割单元用于对所述图像采集信息集进行三分量分割,获取三分量分割图像集;分区处理单元,所述分区处理单元用于通过所述目标对象结构特征与所述三分量分割图像集,对所述图像采集信息集进行分区处理,获取多个图像采集信息子集;图像特征获取单元,所述图像特征获取单元用于通过所述图像特征处理系统的特征功能与
所述多个图像采集信息子集,结合所述采集装置参数信息,获取图像特征处理结果;显示输出单元,所述显示输出单元用于基于所述图像特征处理系统的显示模块,将所述图像特征处理结果显示输出。
8.本技术中提供的一个或多个技术方案,至少具有如下技术效果或优点:
9.由于采用了通过所述图像采集装置,提取采集装置参数信息,对目标对象进行全角度图像采集,获取图像采集信息集,进行特征处理,获取目标对象结构特征;对所述图像采集信息集进行三分量分割,获取三分量分割图像集,对所述图像采集信息集进行分区处理,获取多个图像采集信息子集;通过所述图像特征处理系统的特征功能与所述多个图像采集信息子集,结合所述采集装置参数信息,获取图像特征处理结果;基于所述图像特征处理系统的显示模块,将所述图像特征处理结果显示输出。本技术实施例达到了进行灰度匹配,进行分区处理,提高图像特征处理准确度,针对特征功能,匹配确定图像特征处理结果,提高特征功能图像特征处理结果适配度的技术效果。
附图说明
10.图1为本技术一种基于机器视觉的图像特征处理方法的流程示意图;
11.图2为本技术一种基于机器视觉的图像特征处理方法的合成图像采集信息集的流程示意图;
12.图3为本技术一种基于机器视觉的图像特征处理方法的获取图像特征处理结果的流程示意图;
13.图4为本技术一种基于机器视觉的图像特征处理系统的结构示意图。
14.附图标记说明:参数提取单元11,全角度采集单元12,结构特征获取单元13,三分量分割单元14,分区处理单元15,图像特征获取单元16,显示输出单元17。
具体实施方式
15.本技术通过提供了一种基于机器视觉的图像特征处理方法及系统,解决了图像特征处理准确度低,导致图像特征处理结果与图像特征处理系统的特征功能的适配度低的技术问题,达到了进行灰度匹配,进行分区处理,提高图像特征处理准确度,针对特征功能,匹配确定图像特征处理结果,提高特征功能图像特征处理结果适配度的技术效果。
16.实施例一
17.如图1所示,本技术提供了一种基于机器视觉的图像特征处理方法,其中,所述方法应用于图像特征处理系统,所述系统与图像采集装置通信连接,所述方法包括:
18.步骤s100:通过所述图像采集装置,提取采集装置参数信息;
19.步骤s200:通过所述图像采集装置与所述采集装置参数信息,对目标对象进行全角度图像采集,获取图像采集信息集;
20.具体而言,图像特征处理系统联合图像采集装置,对图像采集装置采集所得图像信息进行特征处理,所述图像采集装置为摄像机等图像实时采集设备,所述采集装置参数信息包括但不限于曝光补偿量、感光度、白平衡、光圈、快门速度,具体基于所述图像采集装置的设置确定。
21.具体而言,通过图像采集装置与采集装置参数信息,对所述目标对象进行全角度
采集,所述目标对象即图像特征处理的目标,不对所述目标对象进行限制,常见的,所述目标对象设定为风扇、水杯等任意其他结构体,在完成目标对象进行全角度图像采集后,图像采集装置输出图像采集信息集,所述图像采集信息集包括所述目标对象不同角度的图像信息,所述图像采集信息集的元素即不同角度的图像信息与对应的角度信息,通过进行数据采集,为后续进行特征分析处理提供数据基础。
22.进一步的,通过所述图像采集装置与所述采集装置参数信息,对目标对象进行全角度图像采集,获取图像采集信息集,步骤s200包括:
23.步骤s210:获取预设采集约束信息;
24.步骤s220:通过所述预设采集约束信息,对所述目标对象与所述图像采集装置进行采集约束限制,获取图像采集指令;
25.步骤s230:基于所述图像采集指令与所述采集装置参数信息,通过所述图像采集装置,对目标对象进行全角度图像采集,获取图像采集信息集。
26.具体而言,预设采集约束信息包括所述图像采集装置与目标对象的距离约束信息与角度转换挪动过程的速度约束信息,所述预设采集约束信息为所述图像特征处理系统的预设指标参数,所述预设采集约束信息与三维扫描仪侧向过程的指标限定相匹配,具体结合实际参数指标进行确定,若所述目标对象与所述图像采集装置不满足预设采集约束信息,需要进行调整,在所述目标对象与所述图像采集装置满足预设采集约束信息后,获取图像采集指令,图像采集指令用于控制所述图像采集装置开始进行图像采集,在进行全角度图像采集过程中,通过预设采集约束信息,进行采集限制,基于所述采集装置参数信息,在所述预设采集约束信息限定中进行全角度图像采集,获取图像采集信息集,为保证图像采集信息集的精度提供技术支持。
27.进一步的,如图2所示,基于所述图像采集指令与所述采集装置参数信息,通过所述图像采集装置,对目标对象进行全角度图像采集,获取图像采集信息集,步骤s230包括:
28.步骤s231:通过所述图像采集指令与所述采集装置参数信息,对所述目标对象进行全角度图像采集,获取全角度模糊图像信息集;
29.步骤s232:通过预设识别精度,对所述全角度模糊图像信息集进行识别,获取细节调焦指令;
30.步骤s233:通过所述细节调焦指令,对所述目标对象进行局部图像采集,获取局部细化图像信息集;
31.步骤s234:通过所述局部细化图像信息集与所述全角度模糊图像信息集,合成所述图像采集信息集。
32.具体而言,在进行图像采集的过程中,不可避免的,存在部分细部特征难以识别的位置,图形采集装置需要进行调焦,提高部分细部特征位置的采集精度,通过预设识别精度,适应性调整所述图形采集装置的图像采集精度,在保证图像采集信息集的精度的同时,提高图像采集信息集有效性,避免因精度提升出现数据冗杂,导致图像特征处理系统效率下降的问题。
33.进一步具体说明,所述全角度模糊图像信息集即所述目标对象进行全角度图像信息,所述全角度模糊图像信息集中无法保证所述目标对象的细部特征的精度,通过预设识别精度,所述预设识别精度包括但不限于轮廓识别精度、转角识别精度(曲面转角:转角位
置的曲率,切面转角:转角位置的角度),所述预设识别精度为所述图像特征处理系统的预设指标参数,基于所述预设识别精度,在全角度模糊图像信息集进行识别,确定无法保证所述目标对象的细部特征的位置信息后,获取细节调焦指令,对所述目标对象进行局部图像采集,获取局部细化图像信息集;结合所述细部特征的位置信息,将所述局部细化图像信息集与所述全角度模糊图像信息集进行合成,获取所述图像采集信息集。
34.步骤s300:对所述图像采集信息集进行特征处理,获取目标对象结构特征;
35.进一步的,对所述图像采集信息集进行特征处理,获取目标对象结构特征,步骤s300包括:
36.步骤s310:将所述图像采集信息集导入三维扫描仪,获取目标对象几何特征;
37.步骤s320:通过所述目标对象几何特征,对所述图像采集信息集进行几何轮廓提取,获取目标对象轮廓特征;
38.步骤s330:通过所述对象轮廓特征与所述目标对象几何特征,获取所述目标对象结构特征。
39.具体而言,为保证目标对象结构特征的稳定性,通过对象轮廓特征与目标对象几何特征进行合并,确定目标对象结构特征,为降低所述三维扫描仪需要进行多次校准导致的时间资源的浪费。
40.进一步具体说明,所述三维扫描仪用于侦测并分析目标对象或环境的形状与外观,将所述图像采集信息集作为输入数据,导入三维扫描仪的输入端口,三维扫描仪输出所述目标对象的目标对象几何特征,几何特征即目标对象的多个几何点位信息;基于目标对象几何特征,提取目标对象的轮廓,通过所述图像采集信息集,对所述目标对象的轮廓进行精度优化调整,获取目标对象轮廓特征,目标对象轮廓特征即目标对象轮廓位置的多个几何点位信息,所述目标对象轮廓特征的信息熵大于所述目标对象的轮廓的信息熵;获取所述目标对象结构特征,保证目标对象结构特征中的目标对象轮廓特征的可信度提供支持。
41.步骤s400:对所述图像采集信息集进行三分量分割,获取三分量分割图像集;
42.步骤s500:通过所述目标对象结构特征与所述三分量分割图像集,对所述图像采集信息集进行分区处理,获取多个图像采集信息子集;
43.步骤s600:通过所述图像特征处理系统的特征功能与所述多个图像采集信息子集,结合所述采集装置参数信息,获取图像特征处理结果;
44.步骤s700:基于所述图像特征处理系统的显示模块,将所述图像特征处理结果显示输出。
45.具体而言,为保证图像分区过程的精度,需要进行灰度匹配,灰度匹配等相关图像灰度化处理操作为图像处理的预处理步骤,支持后续进行图像分割、图像识别和图像分析等相关操作。
46.进一步具体说明,对所述图像采集信息集进行三分量分割,所述图像采集信息集的三分量即三基色分量,三基色分量包括蓝(b分量)、绿(g分量)、红(r分量)三基色的单色图,获取三分量分割图像集,所述三分量分割图像集包括蓝基色图像信息集、绿基色图像信息集与红基色图像信息集;对三分量分割图像集进行灰度匹配,即计算获取三分量的亮度的平均值,将所述三分量的亮度的平均值设定为灰度值,通过所述三分量分割图像集,获取目标对象灰度数据集,结合所述目标对象结构特征,对所述图像采集信息集进行分区处理,
获取多个图像采集信息子集,在进行分区处理过程中,提高图像的分割精度。
47.进一步具体说明,为提高所述图像特征处理系统的特征功能与图像特征处理结果的适配度,所述图像特征处理系统的特征功能包括但不限于定位功能、测量功能、识别功能、读码功能、缺陷标记功能、3d建模功能、逻辑运算功能,基于所述采集装置参数信息,通过所述图像特征处理系统的特征功能与所述多个图像采集信息子集,对特征功能与特征结果进行匹配,完成匹配后,对应的反馈输出,获取图像特征处理结果,所述图像特征处理结果即所述图像特征处理系统的输出,利用所述图像特征处理系统的显示模块进行显示输出,为定制化匹配图像特征处理输出,提高图像特征处理的灵活度。
48.进一步的,如图3所示,通过所述图像特征处理系统的特征功能与所述多个图像采集信息子集,结合所述采集装置参数信息,获取图像特征处理结果,步骤s600包括:
49.步骤s610:获取所述图像特征处理系统的特征功能,所述特征功能包括定位测量功能、读码识别与逻辑运算功能、3d建模与缺陷功能;
50.步骤s620:通过定位测量功能,对所述多个图像采集信息子集进行定位测量,获取目标对象测量特征;
51.步骤s630:通过所述目标对象测量特征与所述目标对象结构特征,基于所述3d建模与缺陷功能,进行3d建模,获取目标对象3d模型;
52.步骤s640:通过所述读码识别与逻辑运算功能,对所述目标对象3d模型进行缺陷识别,获取目标对象缺陷特征;
53.步骤s650:通过所述目标对象测量特征与所述目标对象缺陷特征,结合所述采集装置参数信息,获取图像特征处理结果。
54.具体而言,基于所述特征功能,对多个图像采集信息子集进行针对性的特征处理,保证图像特征处理结果与特征功能的适配度。
55.进一步具体说明,所述图像特征处理系统的特征功能包括但不限于定位功能、测量功能、识别功能、读码功能、缺陷标记功能、3d建模功能、逻辑运算功能,对所述特征功能进行关联绑定,对应确定定位测量功能、读码识别与逻辑运算功能、3d建模与缺陷功能,所述图像特征处理系统的显示模块包括定位测量功能的显示单元、读码识别与逻辑运算功能的显示单元、3d建模与缺陷功能的显示单元,提高图像特征指标提取的便捷度。
56.进一步具体说明,所述定位测量功能对应设定了多个节点标记锚点,可以对所述多个图像采集信息子集进行定位测量,输出目标对象测量特征;所述3d建模与缺陷功能对应嵌入了三维建模软件,可以对所述目标对象测量特征与所述目标对象结构特征进行三维建模,通过所述目标对象测量特征与所述目标对象结构特征,可以对所述目标对象进行数字建模还原与缺陷定位标记,基于所述3d建模与缺陷功能,进行3d建模,获取目标对象3d模型,结合所述读码识别与逻辑运算功能,对所述目标对象3d模型进行无损比对,获取目标对象缺陷特征,所述目标对象缺陷特征包括但不限于缺陷位置特征、缺陷形状特征;基于所述采集装置参数信息,将所述目标对象测量特征与所述目标对象缺陷特征与对应特征功能进行反馈输出,获取图像特征处理结果,定制化匹配图像特征处理结果,从机器视觉满足用户服务的定制化需求。
57.进一步的,通过所述读码识别与逻辑运算功能,对所述目标对象3d模型进行缺陷识别,获取目标对象缺陷特征,步骤s640包括:
58.步骤s641:通过读码识别功能,提取所述目标对象3d模型上的贴码标签;
59.步骤s642:对所述目标对象3d模型上的贴码标签进行识别,获取矩形方阵记录数据符号信息;
60.步骤s643:对所述矩形方阵记录数据符号信息进行逻辑运算,获取目标对象标签信息;
61.步骤s644:基于所述目标对象标签信息,进行在线联网,提取目标对象无损3d模型;
62.步骤s645:对所述目标对象3d模型与所述目标对象无损3d模型进行比对,获取结构比对结果;
63.步骤s646:通过所述结构比对结果,进行缺陷识别,获取目标对象缺陷特征。
64.进一步的,本技术实施例还包括:
65.步骤s810:基于所述图像特征处理系统的特征功能,定位标记所述目标对象测量特征、所述矩形方阵记录数据符号信息及目标对象标签信息、所述目标对象3d模型及所述目标对象缺陷特征;
66.步骤s820:通过所述定位测量功能,进行数据反馈,反馈输出所述目标对象测量特征;通过所述读码识别与逻辑运算功能,进行数据反馈,反馈输出所述矩形方阵记录数据符号信息及目标对象标签信息;通过所述3d建模与缺陷功能,进行数据反馈,反馈输出所述目标对象3d模型及所述目标对象缺陷特征;
67.步骤s830:通过所述图像特征处理系统的显示模块,将所述图像特征处理系统的特征功能及对应的反馈输出信息进行显示输出。
68.具体而言,通过目标对象的贴码标签标记的基础信息,联网确定目标对象无损3d模型,为进行无损比对提供数据支持,联合所述图像特征处理系统的显示模块,对显示模块进行窗口匹配输出,优化图像特征处理输出的显示逻辑。
69.进一步具体说明,所述读码识别功能关联一射频识别扫描装置,可以所述目标对象3d模型上的贴码标签进行扫描提取,获取目标对象的贴码标签上的矩形方阵记录数据符号信息,所述矩形方阵记录数据符号信息包括目标对象的基础信息,所述目标对象的基础信息即目标对象的构件信息、目标对象的颜色信息等相关基础信息,所述矩形方阵记录数据符号常见可以是条形码、二维码或任意矩形方阵码;进行逻辑运算,获取目标对象标签信息,所述目标对象标签信息包括但不限于目标对象型号信息、目标对象类型信息即相关数据信息;以所述目标对象标签信息为标记检索符,进行在线联网,提取目标对象无损3d模型;进行比对,获取结构比对结果,所述结构比对结果即目标对象3d模型与目标对象无损3d模型的存在区别的结构信息,获取目标对象缺陷特征,为保证目标对象缺陷特征的有效性提供技术支持。
70.具体而言,为保证图像特征处理结果与特征功能的适配度,通过所述特征功能,进行定位标记,获取标记特征,所述标记特征包括所述目标对象测量特征、所述矩形方阵记录数据符号信息及目标对象标签信息、所述目标对象3d模型及所述目标对象缺陷特征;对所述特征功能,进行输出关联对应,在定位测量功能的显示单元显示输出所述目标对象测量特征;在读码识别与逻辑运算功能的显示单元显示输出所述矩形方阵记录数据符号信息及目标对象标签信息;在3d建模与缺陷功能的显示单元显示输出所述目标对象3d模型及所述
目标对象缺陷特征,为定制化匹配图像特征处理输出提供技术支持。
71.综上所述,本技术所提供的一种基于机器视觉的图像特征处理方法及系统具有如下技术效果:
72.由于采用了通过图像采集装置,提取采集装置参数信息,对目标对象进行全角度图像采集,获取图像采集信息集,进行特征处理,获取目标对象结构特征;对图像采集信息集进行三分量分割,获取三分量分割图像集,对图像采集信息集进行分区处理,获取多个图像采集信息子集;通过图像特征处理系统的特征功能与多个图像采集信息子集,结合采集装置参数信息,获取图像特征处理结果;基于图像特征处理系统的显示模块,将图像特征处理结果显示输出。本技术通过提供了一种基于机器视觉的图像特征处理方法及系统,达到了进行灰度匹配,进行分区处理,提高图像特征处理准确度,针对特征功能,匹配确定图像特征处理结果,提高特征功能图像特征处理结果适配度的技术效果。
73.由于采用了通过图像采集指令与采集装置参数信息,对目标对象进行全角度图像采集,获取全角度模糊图像信息集;通过预设识别精度,对全角度模糊图像信息集进行识别,获取细节调焦指令,对目标对象进行局部图像采集,获取局部细化图像信息集,合成图像采集信息集。适应性调整图形采集装置的图像采集精度,在保证图像采集信息集的精度的同时,提高图像采集信息集有效性,避免因精度提升出现数据冗杂,导致图像特征处理系统效率下降的问题。
74.由于采用了获取图像特征处理系统的特征功能,特征功能包括定位测量功能、读码识别与逻辑运算功能、3d建模与缺陷功能;通过定位测量功能,进行定位测量,获取目标对象测量特征;结合目标对象结构特征,基于3d建模与缺陷功能,进行3d建模,获取目标对象3d模型;通过读码识别与逻辑运算功能,进行缺陷识别,获取目标对象缺陷特征,结合采集装置参数信息与目标对象测量特征,获取图像特征处理结果。提高图像特征指标提取的便捷度,从机器视觉满足用户服务的定制化需求。
75.实施例二
76.基于与前述实施例中一种基于机器视觉的图像特征处理方法相同的发明构思,如图4所示,本技术提供了一种基于机器视觉的图像特征处理系统,其中,所述系统包括:
77.参数提取单元11,所述参数提取单元11用于通过图像采集装置,提取采集装置参数信息;
78.全角度采集单元12,所述全角度采集单元12用于通过所述图像采集装置与所述采集装置参数信息,对目标对象进行全角度图像采集,获取图像采集信息集;
79.结构特征获取单元13,所述结构特征获取单元13用于对所述图像采集信息集进行特征处理,获取目标对象结构特征;
80.三分量分割单元14,所述三分量分割单元14用于对所述图像采集信息集进行三分量分割,获取三分量分割图像集;
81.分区处理单元15,所述分区处理单元15用于通过所述目标对象结构特征与所述三分量分割图像集,对所述图像采集信息集进行分区处理,获取多个图像采集信息子集;
82.图像特征获取单元16,所述图像特征获取单元16用于通过所述图像特征处理系统的特征功能与所述多个图像采集信息子集,结合所述采集装置参数信息,获取图像特征处理结果;
83.显示输出单元17,所述显示输出单元17用于基于所述图像特征处理系统的显示模块,将所述图像特征处理结果显示输出。
84.进一步的,所述系统包括:
85.采集约束信息获取单元,所述采集约束信息获取单元用于获取预设采集约束信息;
86.采集约束限制单元,所述采集约束限制单元用于通过所述预设采集约束信息,对所述目标对象与所述图像采集装置进行采集约束限制,获取图像采集指令;
87.全角度图像采集单元,所述全角度图像采集单元用于基于所述图像采集指令与所述采集装置参数信息,通过所述图像采集装置,对目标对象进行全角度图像采集,获取图像采集信息集。
88.进一步的,所述系统包括:
89.模糊图像信息集获取单元,所述模糊图像信息集获取单元用于通过所述图像采集指令与所述采集装置参数信息,对所述目标对象进行全角度图像采集,获取全角度模糊图像信息集;
90.信息集识别单元,所述信息集识别单元用于通过预设识别精度,对所述全角度模糊图像信息集进行识别,获取细节调焦指令;
91.局部图像采集单元,所述局部图像采集单元用于通过所述细节调焦指令,对所述目标对象进行局部图像采集,获取局部细化图像信息集;
92.图像信息集合成单元,所述图像信息集合成单元用于通过所述局部细化图像信息集与所述全角度模糊图像信息集,合成所述图像采集信息集。
93.进一步的,所述系统包括:
94.几何特征获取单元,所述几何特征获取单元用于将所述图像采集信息集导入三维扫描仪,获取目标对象几何特征;
95.几何轮廓提取单元,所述几何轮廓提取单元用于通过所述目标对象几何特征,对所述图像采集信息集进行几何轮廓提取,获取目标对象轮廓特征;
96.结构特征获取单元,所述结构特征获取单元用于通过所述对象轮廓特征与所述目标对象几何特征,获取所述目标对象结构特征。
97.进一步的,所述系统包括:
98.特征功能获取单元,所述特征功能获取单元用于获取所述图像特征处理系统的特征功能,所述特征功能包括定位测量功能、读码识别与逻辑运算功能、3d建模与缺陷功能;
99.定位测量单元,所述定位测量单元用于通过定位测量功能,对所述多个图像采集信息子集进行定位测量,获取目标对象测量特征;
100.3d建模单元,所述3d建模单元用于通过所述目标对象测量特征与所述目标对象结构特征,基于所述3d建模与缺陷功能,进行3d建模,获取目标对象3d模型;
101.缺陷识别单元,所述缺陷识别单元用于通过所述读码识别与逻辑运算功能,对所述目标对象3d模型进行缺陷识别,获取目标对象缺陷特征;
102.特征处理结果获取单元,所述特征处理结果获取单元用于通过所述目标对象测量特征与所述目标对象缺陷特征,结合所述采集装置参数信息,获取图像特征处理结果。
103.进一步的,所述系统包括:
104.贴码标签提取单元,所述贴码标签提取单元用于通过读码识别功能,提取所述目标对象3d模型上的贴码标签;
105.贴码标签识别单元,所述贴码标签识别单元用于对所述目标对象3d模型上的贴码标签进行识别,获取矩形方阵记录数据符号信息;
106.逻辑运算处理单元,所述逻辑运算处理单元用于对所述矩形方阵记录数据符号信息进行逻辑运算,获取目标对象标签信息;
107.在线联网提取单元,所述在线联网提取单元用于基于所述目标对象标签信息,进行在线联网,提取目标对象无损3d模型;
108.模型比对分析单元,所述模型比对分析单元用于对所述目标对象3d模型与所述目标对象无损3d模型进行比对,获取结构比对结果;
109.缺陷识别单元,所述缺陷识别单元用于通过所述结构比对结果,进行缺陷识别,获取目标对象缺陷特征。
110.进一步的,所述系统包括:
111.定位标记单元,所述定位标记单元用于基于所述图像特征处理系统的特征功能,定位标记所述目标对象测量特征、所述矩形方阵记录数据符号信息及目标对象标签信息、所述目标对象3d模型及所述目标对象缺陷特征;
112.数据反馈单元,所述数据反馈单元用于通过所述定位测量功能,进行数据反馈,反馈输出所述目标对象测量特征;通过所述读码识别与逻辑运算功能,进行数据反馈,反馈输出所述矩形方阵记录数据符号信息及目标对象标签信息;通过所述3d建模与缺陷功能,进行数据反馈,反馈输出所述目标对象3d模型及所述目标对象缺陷特征;
113.数据显示输出单元,所述数据显示输出单元用于通过所述图像特征处理系统的显示模块,将所述图像特征处理系统的特征功能及对应的反馈输出信息进行显示输出。
114.本说明书和附图仅仅是本技术的示例性说明,在不脱离本技术的精神和范围的情况下,可对其进行各种修改和组合。本技术的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术意图包括这些改动和变型在内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
