1.本发明属于光纤通信、车载雷达技术领域,尤其涉及一种高集成度车载激光雷达系统。
背景技术:
2.车载激光雷达是未来智能辅助驾驶、无人驾驶汽车多传感器体系中必不可少的核心传感器之一,随着无人驾驶市场的高速发展,越来越多的企业加入对激光雷达的新应用开发和对先进技术的追求。激光雷达的原理是通过测量激光信号的时间差、相位差确定目标物的距离、速度和方位,扫描方式通过机械,mems扫描或相控扫描等。车载激光雷达的测距精度对自动驾驶的定位及避障及其重要,如何对激光雷达的测距精度进行精确标定计量已经成为业界亟待解决的问题。
3.激光雷达有tof和fmcw两种工作模式,tof使用时间来测量距离,而fmcw使用频率来测量距离。tof(time of flight)飞行时间法,如图2所示,测距原理是:用光脉冲在发射机,目标物,接收机之间往返的飞行时间来测算距离。发射机与目标物的距离为d,发射光信号和接收到的光信号的时延为τ,因此τ=2d/c,c为光速。tof是强度信号,容易淹末在背景光信号中。
4.fmcw(frequency modulated continuous wave)调频连续波,原理是:基于相干原理即被目标物反射回的光跟自身发射的本地光发生干涉,fmcw是连续光干涉,可以从杂乱的背景光中,提取出与本地特征谱一样的光信号,不会受到各种杂光的干扰,这意味着能够实现更精确的目标检测。如图3所示,发射的本地光信号为l,经分光器后,反射部分本地光l0=l*r1*r2,透射后经目标物反射的信号光为s0=l*t1*r0*t2,其中,l为发射的信号光强度,r1和t1为分光器的反射和透射率,r1 t1=1,r2和t2为混频器件的反射和透射率,r2 t2=1,r0为光信号在空气中被被测物体反射回的反射率,部分本体光l0和经目标物反射的s0在混频器件上发生干涉后被接收。
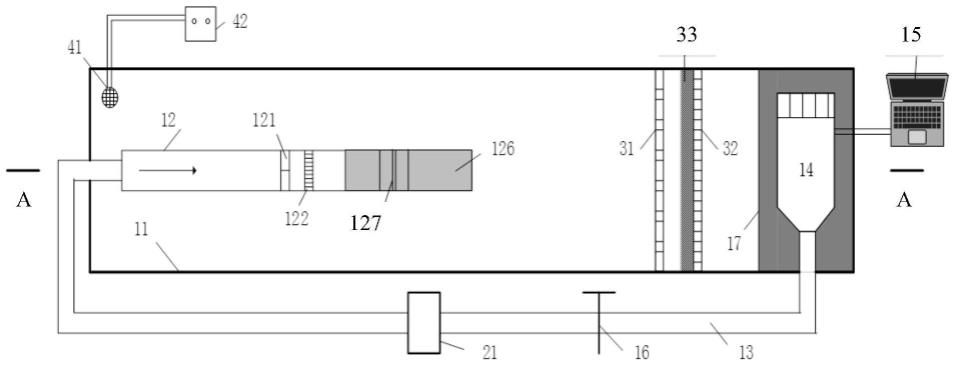
5.现有的一种车载激光雷达系统结构如图1所示,激光光源发射的信号光经扫描装置发射至被测物体,由被测物物体反射后的光被接收器接收后进行信号分析处理,从而算出被测物体的距离和速度等信息。这种结构中激光光源的种子光源光信号的放大是一个单独光路放大结构,放大后光信号的发射和反射信号的接收是独立的,这样整个激光雷达系统结构较大、成本高且系统损耗也大。
技术实现要素:
6.有鉴于此,为克服现有技术的缺陷和不足,本发明提供一种高集成度车载激光雷达系统,通过光路由器将光信号的放大、发射、扫描和探测接收集成在一起,发射和接收是同轴光路,具有高集成度,系统损耗小,光路简单,结构紧凑等优势。
7.为实现上述目的,本发明采用的技术方案是:
8.一种高集成度车载激光雷达系统,包括种子光源、光路由器件、泵浦光源、放大光
纤、部分反射片、扫描系统、探测器和信号处理装置;所述的种子光源与光路由器件的第一端口连接,所述泵浦光源通过放大光纤与光路由器件的第二端口连接,所述的部分反射片、扫描系统设置于光路由器件的第三端口,所述的探测器和信号处理装置设置于光路由器件的第四端口;所述种子光源输入的光信号从光路由器件的第一端口输入,经过光路由器件后由第二端口输出;经所述放大光纤和泵浦光源放大,放大后的光信号,再返回第二端口,由所述光路由器件的第三端口输出;经过部分反射片,小部分光信号被反射,反射的部分光束进入第三端口输入后从第四端口输出被探测器接收,大部分光信号透射后经所述扫描系统照射到被测物体,经被测物体反射的部分光束进入第三端口输入后由第四端口输出被探测器接收。
9.进一步地,所述的光路由器件的四个端口将激光雷达光信号的放大、发射、扫描和探测接收四个主要结构集成一体,各个端口可以灵活配置。
10.进一步地,适用于tof和fmcw两种激光雷达工作模式。
11.进一步地,所述的tof模式中,第三端口的部分反射光起到分光探测器功能。
12.进一步地,所述的fmcw模式中,所述部分反射片反射的小部分光信号和被测物体反射回的部分光信号在所述部分反射片上发生干涉,干涉信号被探测器接收经过信号处理装置获得相干信号进而获得被测物的距离、速度和方位。
13.进一步地,所述的光路由器件的第三端口的发射和接收光路是同轴光路,实现最大接收效率。
14.与现有技术相比,本发明具有以下有益效果:
15.本发明提供了一种高集成度车载激光雷达系统,通过光路由器件的四个端口将激光雷达光信号的放大、发射、扫描和探测接收四个主要结构集成一起,实现了雷达系统的高集成度,结构紧凑。另外本发明在fmcw模式中会更有优势,因为第三端口中光信号发射和接收是同轴光路,部分反射片反射的部分本地光信号和被测物体反射回的部分光信号在部分反射片上发生干涉。本地光信号为l,部分反射片的反射和透射率分别为r1和t1,反射的部分本地信号光l0=l*r1,反射的部分信号光s0=l*t1*r0*t1,r1 t1=1,r0为光信号在空气中被被测物体反射回的反射率;现有激光雷达系统fmcw模式中,l0=l*r1*r2,s0=l*t1*r0*t2,r1 t1=1,r2 t2=1,当取r1=0.1%,t1=99.9%,r2=0.1%,t2=99.9%时,能得出本发明同轴光路结构的fmcw模式中,接收到的部分本地光信号l0比现有fmcw模式接收到的部分本地光信号强百倍,实现最大接收效率,因此本发明系统损耗明显更小,实现更加精确的目标检测。
附图说明
16.图1是现有的一种车载激光雷达系统结构示意图。
17.图2是现有激光雷达系统tof模式测距原理示意图。
18.图3是现有激光雷达系统fmcw模式检测原理示意图。
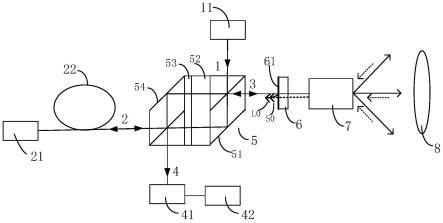
19.图4是本发明实施例的高集成度车载激光雷达系统结构示意图。
20.图5是本发明实施例中同轴光路结构fmcw模式光路原理示意图。
t0)*c/2,c为光速,d即为被测物体8的距离。t0信号的强弱也同时起到tap pd,即监控输出功率强弱的监控功能。
32.如图5所示,在fmcw模式时,从作为输入输出口的第三端口3输出的是连续的光波调制信号,放大后的本地信号光为l,一部分从部分反射片6上连续反射,部分反射片6的反射和透射率分别为r1和t1,反射的部分本地信号光l0=l*r1;大部分从部分反射片6上连续透射并且从被测物体8上连续反射,反射的部分信号光s0=l*t1*r0*t1,其中,r1 t1=1,r0为光信号在空气中被被测物体反射回的反射率。这两部分光在部分反射片6的面61上发生干涉,形成带距离速度信息的干涉光,进入第三端口3,经光路由器件5后由第四端口4输出,再由被探测器41接收。所述探测器41接收到的信号,经信号处理装置42信号处理,获得被测物体8的位置距离和移动速度及方向。
33.本发明不局限于上述最佳实施方式,任何人在本发明的启示下都可以得出其它各种形式的高集成度车载激光雷达系统,凡依本发明范围所做的均等变化与修饰,皆应属本发明的涵盖范围。
技术特征:
1.一种高集成度车载激光雷达系统,其特征在于:包括种子光源、光路由器件、泵浦光源、放大光纤、部分反射片、扫描系统、探测器和信号处理装置;所述的种子光源与光路由器件的第一端口连接,所述泵浦光源通过放大光纤与光路由器件的第二端口连接,所述的部分反射片、扫描系统设置于光路由器件的第三端口,所述的探测器和信号处理装置设置于光路由器件的第四端口;所述种子光源输入的光信号从光路由器件的第一端口输入,经过光路由器件后由第二端口输出;经所述放大光纤和泵浦光源放大,放大后的光信号,再返回第二端口,由所述光路由器件的第三端口输出;经过部分反射片,小部分光信号被反射,反射的光束进入第三端口后从第四端口输出被探测器接收,大部分光信号透射后经所述扫描系统发射,经被测物体反射的光束进入第三端口后由第四端口输出被探测器接收。2.根据权利要求1所述的一种高集成度车载激光雷达系统,其特征在于:所述的光路由器件的四个端口将激光雷达光信号的放大、发射、扫描和探测接收四个结构集成一体,各个端口灵活配置。3.根据权利要求1所述的一种高集成度车载激光雷达系统,其特征在于:适用于tof和fmcw两种激光雷达工作模式。4.根据权利要求3所述的一种高集成度车载激光雷达系统,其特征在于:所述的tof模式中,第三端口的部分反射光起到分光探测器功能。5.根据权利要求3所述的一种高集成度车载激光雷达系统,其特征在于:所述的fmcw模式中,所述部分反射片反射的小部分光信号和被测物体反射回的部分光信号在所述部分反射片上发生干涉,干涉信号被探测器接收经过信号处理装置获得相干信号进而获得被测物的距离、速度和方位。6.根据权利要求1所述的一种高集成度车载激光雷达系统,其特征在于:所述的光路由器件的第三端口的发射和接收光路是同轴光路,实现最大接收效率。
技术总结
本发明涉及一种高集成度车载激光雷达系统,该系统包括:种子光源、光路由器件、泵浦光源、放大光纤、部分反射片、扫描系统、探测器、信号处理装置。所述种子光源光信号从光路由器件第一端口输入,由光路由器件第二端口输出;经放大光纤和泵浦光源放大后的光信号,由光路由器的第三端口输出;经部分反射片,小部分光信号被反射,反射的光束经第三端口从第四端口输出,大部分光信号透射后经扫描系统发射,被测物体反射的光束经第三端口后由第四端口输出。因此本发明的车载激光雷达系统通过光路由器将光信号的放大、发射、扫描和探测接收四个主要结构集成一体,发射和接收是同轴光路,具有高集成度,系统损耗小,光路简单,结构紧凑等优势。势。势。
技术研发人员:蒋友山 林文雄 吴玉霞
受保护的技术使用者:福建天蕊光电有限公司
技术研发日:2022.08.23
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。