1.本发明涉及结构光三维测量领域,特别是一种基于棋盘格中心点提取的投影光路标定方法。
背景技术:
2.在结构光三维测量领域,投影仪标定一直是一个较为繁琐的问题。传统方法是一般采用圆点标定板对其进行标定,然而使用圆点标定板不仅需要在识别椭圆边界后还需要进行椭圆拟合提取中心,降低提取圆心的精度,不仅计算复杂而且还会受到透视变换的影响。由于透视变换的影响,在圆点标定板提取中心时,椭圆拟合的圆心不是真实的圆心,因此会造成标定的误差。因此寻找一种不受透视变换影响且计算简洁的标定方法十分重要。
技术实现要素:
3.为了更简单的实现投影仪标定,本发明提供了一种基于棋盘格中心点提取的投影光路标定方法。
4.本发明采用的技术方案如下:一种基于棋盘格中心点提取的投影光路标定方法,步骤如下:
5.步骤一,计算世界坐标系下的棋盘格中心点坐标p(x,y,z);
6.步骤二,读入相机拍摄得到的棋盘格标定图片,提取棋盘格角点坐标。根据提取得到的棋盘格角点像素坐标计算棋盘格中心点的像素坐标pc(x,y);
7.步骤三,计算投影仪中心点像素坐标下的对应的横竖相位值将相位值映射至投影靶面计算投影仪靶面的像素坐标p
p
(x,y);
8.步骤四,根据世界坐标系下的棋盘格中心点坐标p(x,y,z)与投影仪靶面上的像素坐标p
p
(x,y)标定投影仪光路。
9.优选的,步骤一具体如下:
10.按照棋盘格标定板中单个格子的边长x定义棋盘格中心点的坐标,长边为x轴方向,短边为y方向,根据右手螺旋定则确定z轴方向;并假设棋盘格中心点的z轴坐标为0,其中最左上角为原点坐标(0,0,0)。
11.优选的,步骤二具体如下:
12.通过角点坐标提取提取出棋盘格中心点四个最近角点坐标a(x1,y1)、b(x2,y2)、c(x3,y3)与d(x4,y4),其中a与b,c与d分别互为对角线上的点;
13.由此可以得到棋盘格的两个对角线直线方程为:
14.15.求解上述方程组得到一个白色方格中心点坐标pc(x,y)。
16.优选的,步骤三具体如下:
17.首先通过相移法分别对x轴方向,y方向解包裹得到展开相位;
18.然后通过棋盘格中心点坐标pc(x,y)提取中心点的横竖相位值与由下式计算相应的投影仪靶面像素坐标:
[0019][0020]
其中n
x
与ny分别为投影图案正弦条纹的周期数,ω
x
与ωy为单位相位所占像素数。
[0021]
优选的,步骤四具体如下:
[0022]
根据步骤一中求解得到的棋盘格中心点物理坐标p(x,y,z)与步骤三中求得的像素坐标p
p
(x,y),按照张氏标定法求解相应的标定参数。
[0023]
本发明具有如下有益效果:本发明提出了一种基于棋盘格中心点提取的投影光路标定方法,比以往的标定方法计算更加简单,且不受透视变换误差的影响。
附图说明
[0024]
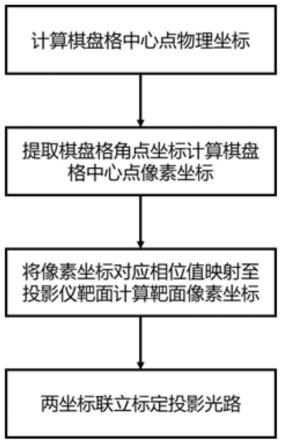
图1是本发明实施例的系统框图。
[0025]
图2是本发明实施例使用的棋盘格标定板。
[0026]
图3是本发明实施例中正常图像的标定板图案。
[0027]
图4是本发明实施例中单个棋盘格图案经过透视变换后的图像。
具体实施方式
[0028]
下面结合实施例与附图,对本发明作进一步说明。
[0029]
如图1所示,为本实施例的步骤流程。首先,计算世界坐标系下的棋盘格中心点坐标p(x,y,z)。然后读入相机拍摄得到的如图2所示的棋盘格标定图片,提取棋盘格角点坐标。根据提取得到的棋盘格角点像素坐标计算棋盘格中心点的像素坐标pc(x,y)。并利用计算得到的中点坐标计算投影仪中心点像素坐标下的对应的横竖相位值再将相位值映射至投影靶面计算投影仪靶面的像素坐标p
p
(x,y)。最后根据世界坐标系下的棋盘格中心点坐标p(x,y,z)与投影仪靶面上的像素坐标p
p
(x,y)标定投影仪光路。
[0030]
具体的步骤如下:
[0031]
步骤一,计算棋盘格中心点世界坐标。按照棋盘格标定板中单个格子的边长x定义棋盘格中心点的坐标。长边为x轴方向,短边为y方向。并根据右手螺旋定则确定z轴方向。并假设棋盘格中心点的z轴坐标为0。其中最左上角为原点坐标(0,0,0)。
[0032]
步骤二,求解棋盘格中心点的像素坐标pc(x,y)。通过角点坐标提取出棋盘格中心点四个最近角点坐标。a(x1,y1)、b(x2,y2)、c(x3,y3)与d(x4,y4)。其中a与b,c与d分别互为对角线上的点。
[0033]
由此可以得到棋盘格的两个对角线直线方程为:
[0034][0035]
求解上述方程组便可以得到一个白色方格中心点坐标pc(x,y)。
[0036]
步骤三,求解投影仪靶面对应于棋盘格中心点的像素坐标p
p
(x,y)。首先通过相移法分别对x轴方向,y方向解包裹得到展开相位。然后通过棋盘格中心点坐标pc(x,y)提取中心点的横竖相位值与由下式计算相应的投影仪靶面像素坐标:
[0037][0038]
其中n
x
与ny分别为投影图案正弦条纹的周期数。ω
x
与ωy为单位相位所占像素数。
[0039]
步骤四,标定参数的求解。根据步骤一中求解得到的棋盘格中心点物理坐标p(x,y,z)与步骤三中求得的像素坐标p
p
(x,y)按照张氏标定法求解相应的标定参数。
[0040]
显然,本发明的上述实施例仅仅是为了说明本发明所作的举例,而并非对本发明的实施方式的限定。其他由本发明的实质精神所引申出的显而易见的变化或变动仍属于本发明的保护范围。
技术特征:
1.一种基于棋盘格中心点提取的投影光路标定方法,其特征在于步骤如下:步骤一,计算世界坐标系下的棋盘格中心点坐标p(x,y,z);步骤二,读入相机拍摄得到的棋盘格标定图片,提取棋盘格角点坐标。根据提取得到的棋盘格角点像素坐标计算棋盘格中心点的像素坐标p
c
(x,y);步骤三,计算投影仪中心点像素坐标下的对应的横竖相位值将相位值映射至投影靶面计算投影仪靶面的像素坐标p
p
(x,y);步骤四,根据世界坐标系下的棋盘格中心点坐标p(x,y,z)与投影仪靶面上的像素坐标p
p
(x,y)标定投影仪光路。2.权利要求1所述的一种基于棋盘格中心点提取的投影光路标定方法,其特征在于,步骤一具体如下:按照棋盘格标定板中单个格子的边长x定义棋盘格中心点的坐标,长边为x轴方向,短边为y方向,根据右手螺旋定则确定z轴方向;并假设棋盘格中心点的z轴坐标为0,其中最左上角为原点坐标(0,0,0)。3.根据权利要求1所述的一种基于棋盘格中心点提取的投影光路标定方法,其特征在于,步骤二具体如下:通过角点坐标提取提取出棋盘格中心点四个最近角点坐标a(x1,y1)、b(x2,y2)、c(x3,y3)与d(x4,y4),其中a与b,c与d分别互为对角线上的点;由此可以得到棋盘格的两个对角线直线方程为:求解上述方程组得到一个白色方格中心点坐标p
c
(x,y)。4.根据权利要求1所述的一种基于棋盘格中心点提取的投影光路标定方法,其特征在于,步骤三具体如下:首先通过相移法分别对x轴方向,y方向解包裹得到展开相位;然后通过棋盘格中心点坐标p
c
(x,y)提取中心点的横竖相位值与由下式计算相应的投影仪靶面像素坐标:其中n
x
与n
y
分别为投影图案正弦条纹的周期数,ω
x
与ω
y
为单位相位所占像素数。5.根据权利要求1所述的一种基于棋盘格中心点提取的投影光路标定方法,其特征在于步骤四具体如下:根据步骤一中求解得到的棋盘格中心点物理坐标p(x,y,z)与步骤三中求得的像素坐标p
p
(x,y),按照张氏标定法求解相应的标定参数。
技术总结
本发明公开了一种基于棋盘格中心点提取的投影光路标定方法,首先计算棋盘格中心点的物理世界坐标。并根据提取得到的棋盘格角点坐标计算棋盘格中心点的像素坐标。再根据中心点像素坐标对应的相位值映射至投影仪的靶面像素坐标。最后根据求得的棋盘格中心点物理坐标与对应的位置上的投影仪靶面像素坐标进行标定投影光路。本方法首先计算棋盘格中心点对应的投影仪靶面像素坐标,再利用靶面像素坐标与棋盘格中心点物理坐标标定投影光路。相较于传统椭圆标定板标定投影仪而言降低计算的复杂度,同时使结果不受透视变换的影响更为精准。同时使结果不受透视变换的影响更为精准。同时使结果不受透视变换的影响更为精准。
技术研发人员:张晓磊 左超 胡岩 梁钟伟 牟双 聂万延
受保护的技术使用者:南京理工大学智能计算成像研究院有限公司
技术研发日:2022.06.30
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。