1.本发明属于超声波电机技术领域,具体是一种基于非对称结构的单模微型超声电机。
背景技术:
2.超声压电电机是一种新型驱动器,利用压电材料的逆压电效应,将电能转化为机械振动能,通过定动子之间的摩擦作用将定子微幅振动转换为动子的宏观运动,实现电能到机械能的转化。与电磁电机相比,压电电机具有结构紧凑、响应速度快、位移分辨率高、低速大转矩等优势,被广泛应用于航空航天、光学仪器、生物医学工程、精密设备等领域。
3.根据振动模式的个数,超声压电电机可分为单模电机和多模电机。多模电机在设计过程中需要对多个振动模态进行频率简并,因此在设计时对定子的尺寸要求严格,增加了结构设计难度,降低了电机设计的灵活性。此外多模电机需要多个驱动信号和信号之间的精确相位控制,这导致控制系统较为复杂。
4.而单模超声电机只需要单模态驱动,采用单相信号控制,可以简化控制电路,具有紧凑的结构,近年来受到广泛关注。然而,单模超声电机有一个主要缺点:单定子难以实现双向运动。为了实现双向运动,单模超声电机中常使用不对称电信号驱动和不对称结构驱动,这会导致结构的复杂性和装配问题,电机体积较大,难以同时实现结构简单、体积小和双向驱动的特点。
技术实现要素:
5.为了实现利用两个独立的频率和振动模态进行激励,通过定子和动子之间的摩擦耦合来驱动转子实现两个方向的运动,同时实现结构简单紧凑、体积小,本发明提供一种基于非对称结构的单模微型超声电机。
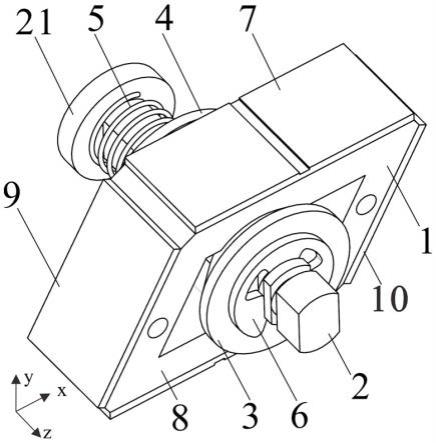
6.一种基于非对称结构的单模微型超声电机包括定子机构、转子机构和预压弹簧5;所述定子机构包括单模压电振子1和两对压电陶瓷片;所述单模压电振子1为金属的空心的平行四边形框架,平行四边形框架的轴向一侧面的上下一对边框上分别设有第一圆弧面11,且一对第一圆弧面11上下对称;平行四边形框架的轴向另一侧面的上下一对边框上分别设有第二圆弧面12,且一对第二圆弧面12上下对称;一对压电陶瓷片为第一压电陶瓷片7和第二压电陶瓷片8,中心对称固定设于单模压电振子1上下对称的一对边框的外侧面上,且第一压电陶瓷片7和第二压电陶瓷片8的极化方向相反;另一对压电陶瓷片为第三压电陶瓷片9和第四压电陶瓷片10,中心对称固定设于单模压电振子1左右对称的一对边框的外侧面上,且第三压电陶瓷片9和第四压电陶瓷片10的极化方向相反;所述转子机构包括一对转子和转轴2;一对转子为第一转子3和第二转子4,设于转轴2上,且能在转轴2上沿着轴向滑动;所述第一转子3和第二转子4为结构相同的圆锥台状,且小直径端相对位于转轴2上;所述转轴2的一端设有端盖21,另一端上开设有一条以上的卡槽22,每条卡槽22内
配合设有卡簧6;所述预压弹簧5套设在端盖21和与之相邻的一对转子中的一个转子之间的转轴2上,并紧压端盖21和与之相邻的一对转子中的一个转子;所述定子机构的单模压电振子1套设于所述转子机构的一对转子上,且单模压电振子1的一对圆弧面作为摩擦界面,与转子机构的一对转子的圆锥面耦合接触;所述定子机构具有两个工作模态:当两对压电陶瓷片同时施加一阶频率的电压信号时,实现一阶平面收缩扩张振动模态;一对第一圆弧面11和一对第二圆弧面12表面质点的运动轨迹为经过第二四象限的斜线轨迹,单模压电振子1与转子机构的一对转子的圆锥面耦合接触产生的摩擦力,实现转子机构的顺时针运动输出;当两对压电陶瓷片同时施加二阶频率的电压信号时,实现二阶平面收缩扩张振动模态;一对第一圆弧面11和一对第二圆弧面12表面质点的运动轨迹为经过第一三象限的斜线轨迹,单模压电振子1与转子机构的一对转子的圆锥面耦合接触产生的摩擦力,实现转子机构的逆时针运动输出;通过施加一阶频率的电压信号或二阶频率的电压信号,实现两个工作模态的切换;所述一阶频率的电压信号或二阶频率的电压信号均为正弦波激励信号。
7.进一步的技术方案如下:所述单模压电振子1的材料为磷青铜;所述第一转子3、第二转子4和转轴2的材料为不锈钢。
8.所述单模压电振子1的平行四边形框架的锐角夹角为60
°
。
9.所述两对压电陶瓷片的材料均为pzt-4锆钛酸铅压电陶瓷或pzt-5锆钛酸铅压电陶瓷。
10.所述转轴2为径向对称两侧削扁的扁轴,限制所述一对转子在轴上的转动。
11.所述转轴2的另一端上开设有三条卡槽22,每条卡槽22内配合设有卡簧6。
12.与现有技术相比,本发明的有益技术效果体现在以下方面:1. 本发明利用单模压电振子的不对称结构,利用两个独立的频率和振动模态进行激励,实现两个方向的驱动。两个振动模态互不耦合干扰,简化定子设计工作,且相应信号控制系统简单。现有的单模超声电机难以同时实现结构简单、体积小和双向驱动的特点,本发明结构采用单一定子的两种振动模态进行双向驱动,无需复杂装配,同时结构简单紧凑、体积小。
13.2. 本发明的单模压电振子工作在谐振状态下,为一体式金属框架结构,减少了零件装配时的接触分界面,减少了振动能在传播过程中的损失;且定转子接触面位置在一阶和二阶工作模态振幅最大处,振动能利用率高。在两个工作模态工作时,全部压电陶瓷片参与工作,有利于发挥压电材料高功率密度输出的特点,提高电机的机械输出性能。
14.3. 本发明的单模微型超声电机,定子设计有两个工作模态,工作在不同激励频率下,定子以其中任意一个模态工作时,定子和转子接触面表面质点的运动轨迹是一条斜直线运动轨迹,并且斜直线的倾斜方向随工作模态的改变而改变,从而推动转子实现不同方向的运动。
15.设定子振动模态在x方向和y方向的振幅为u
x
和uy,当定子处于共振稳态并使转子
稳态运行时,定子的驱动端质点的运动轨迹方程为uy/u
x
x y=0,运动可以分解为切向x和法向y的两个分量:u
t
=u
x
cosωt,u
l =uysinωt。
16.式中,u
t
表示定子的驱动端质点x方向上的位移响应,u
l
表示定子的驱动端质点y方向上的位移响应,u
t
使定子和动子周期性地接触和脱离并提供定子和动子间的动态预压力,u
l
为转子的旋转提供驱动力。
17.给压电陶瓷施加频率为24.89khz,峰峰幅值为150v的单相电压信号,使压电振子工作在一阶平面收缩扩张振动模态,预压力调整为0.26n时,转子组逆时针转动速度为40rpm;给压电陶瓷施加频率为33.9khz,峰峰幅值为75v的单相电压信号,使压电振子工作在二阶平面收缩扩张振动模态,实现转子组的逆时针转动,预压力调整为0.26n时,转子组顺时针转动速度为360rpm。
附图说明
18.图1为本发明电机结构示意图。
19.图2为本发明电机结构装配俯视示意图。
20.图3为本发明中电机结构装配剖视图。
21.图4为本发明中定子结构爆炸图。
22.图5为本发明中转子组装配结构示意图。
23.图6为本发明中转轴结构示意图。
24.图7为本发明中激励电压信号示意图。
25.图8为对应着图7中t0时刻定子机构与转子机构的相对位置。
26.图9为对应着图7中电压e1激励下t0-t1波峰时刻定子机构与转子机构的相对位置。
27.图10为对应着图7中电压e1激励下t1-t2波谷时刻定子机构与转子机构的相对位置。
28.图11为对应着图7中电压e2激励下t0
’‑
t1’波峰时刻定子机构与转子机构的相对位置。
29.图12为对应着图7中电压e2激励下t1
’‑
t2’波谷时刻定子机构与转子机构的相对位置。
30.上图中序号:单模压电振子1、转轴2、第一转子3、第二转子4、预压弹簧5、卡簧6、第一压电陶瓷片7、第二压电陶瓷片8、第三压电陶瓷片9、第四压电陶瓷片10、第一圆弧面11、第二圆弧面12、端盖21、卡槽22。
具体实施方式
31.下面结合附图,通过实施例对本发明作进一步的描述。
32.参见图1和图2,一种基于非对称结构的单模微型超声电机包括定子机构、转子机构和预压弹簧5。
33.参见图4,定子机构包括单模压电振子1和两对压电陶瓷片。单模压电振子1为金属的空心的平行四边形框架,平行四边形框架的z轴方向一侧面的上下一对边框上分别设有第一圆弧面11,且一对第一圆弧面11上下对称;平行四边形框架的z轴方向另一侧面的上下
一对边框上分别设有第二圆弧面12,且一对第二圆弧面12上下对称。一对压电陶瓷片为第一压电陶瓷片7和第二压电陶瓷片8,中心对称通过环氧树脂胶水固定安装于单模压电振子1上下对称的一对边框的外侧面上,且第一压电陶瓷片7和第二压电陶瓷片8的极化方向相反;另一对压电陶瓷片为第三压电陶瓷片9和第四压电陶瓷片10,中心对称通过环氧树脂胶水固定设于单模压电振子1左右对称的一对边框的外侧面上,且第三压电陶瓷片9和第四压电陶瓷片10的极化方向相反。
34.单模压电振子1的材料为磷青铜,单模压电振子1的平行四边形框架的锐角夹角为60
°
。
35.两对压电陶瓷片的材料均为pzt-4锆钛酸铅压电陶瓷。
36.参见图5,转子机构包括一对转子和转轴2。一对转子和转轴2的材料为不锈钢。一对转子为第一转子3和第二转子4,固定于转轴2上,且能在转轴2上沿着轴向滑动;第一转子3和第二转子4为结构相同的圆锥台状,且小直径端相对位于转轴2上。
37.参见图6,转轴2为径向对称两侧削扁的扁轴,限制一对转子在轴上的转动。转轴2的一端设有端盖21,另一端上开设有三条卡槽22,每条卡槽22内配合装有卡簧6。
38.参见图3,预压弹簧5套装在端盖21和第二转子4之间的转轴2上,并紧压端盖21和第二转子4。
39.参见图1和图2,定子机构的单模压电振子1套装于转子机构的一对转子上,且单模压电振子1的一对圆弧面作为摩擦界面,与转子机构的一对转子的圆锥面耦合接触。
40.本发明的工作原理详细说明如下:本发明定子机构具有两个工作模态:当两对压电陶瓷片同时施加一阶频率的电压信号时,实现一阶平面收缩扩张振动模态;一对第一圆弧面11和一对第二圆弧面12表面质点的运动轨迹为经过第二四象限的斜线轨迹,单模压电振子1与转子机构的一对转子的圆锥面耦合接触产生的摩擦力,实现转子机构的顺时针运动输出;当两对压电陶瓷片同时施加二阶频率的电压信号时,实现二阶平面收缩扩张振动模态;一对第一圆弧面11和一对第二圆弧面12表面质点的运动轨迹为经过第一三象限的斜线轨迹,单模压电振子1与转子机构的一对转子的圆锥面耦合接触产生的摩擦力,实现转子机构的逆时针运动输出;通过施加一阶频率的电压信号或二阶频率的电压信号,实现两个工作模态的切换;所述一阶频率的电压信号或二阶频率的电压信号均为正弦波激励信号。
41.设定子振动模态在x方向的振幅为u
x
、在y方向的振幅为uy,当定子处于共振稳态并使转子稳态运行时,定子的驱动端质点的运动轨迹方程为uy/u
x
x y=0,运动可以分解为切向x和法向y的两个分量:u
t
=u
x
cosωt,u
l =uysinωt;式中,u
t
表示定子的驱动端质点x方向上的位移响应、u
l
表示定子的驱动端质点y方向上的位移响应,u
t
使定子和动子周期性地接触和脱离并提供定子和动子间的动态预压力,u
l
为转子的旋转提供驱动力。
42.定子工作在一阶平面收缩扩张振动模态时,给第一压电陶瓷片7表面沿x轴负方向的半部分电极和第二压电陶瓷片8表面沿x轴正方向的半部分电极接通一阶激励信号的正极输出,给第一压电陶瓷片7表面沿x轴正方向的半部分电极和第二压电陶瓷片8表面沿x轴
负方向的半部分电极接通一阶激励信号的负极输出;同时第三压电陶瓷片9和第四压电陶瓷片10表面电极接通该一阶激励信号的负极输出;参照图7,两对压电陶瓷片接入一阶激励信号e1=v1sin(ω1t):参见图7的t0时刻和图8的t0时刻,以该时刻为初始状态,在该初始状态下,转子机构处于初始位置。
43.参见图7,t0-t1时刻,定子机构处于一阶平面收缩扩张振动模态的收缩形变状态,第一圆弧面11和第二圆弧面12表面质点的运动轨迹为经过第四象限的斜线轨迹(θ 《 0);单模压电振子1与转子机构的一对转子的圆锥面接触,通过定转子之间的摩擦耦合驱动转子顺时针转动一定角度。参见图9,t0-t1时刻波峰处,定子机构处于一阶平面收缩扩张振动模态的最小收缩形变状态,转子机构相对于初始位置处于顺时针转动角度最大处。
44.参见图7,t1-t2时刻,定子机构处于一阶平面收缩扩张振动模态的扩张形变状态,第一圆弧面11和第二圆弧面12表面质点的运动轨迹为经过第二象限的斜线轨迹(θ 《 0);单模压电振子1与转子机构的一对转子的圆锥面脱离,通过定转子之间的摩擦耦合带动转子逆时针回转一定角度,该角度小于t0-t1时刻顺时针旋转角度。参见图10,t1-t2时刻波谷处,定子机构处于一阶平面收缩扩张振动模态的最大扩张形变状态,转子机构相对于初始位置顺时针转动一定角度,相对于t1时刻逆时针后退一点。
45.当驱动信号在t0-t1-t2循环工作时,转子机构的位置在图8、图9和图10中的t0-t1-t2循环运动。在多个周期运动下,动子持续往顺时针方向转动。
46.定子工作在二阶平面收缩扩张振动模态时,给第一压电陶瓷片7和第二压电陶瓷片8表面所有电极、第三压电陶瓷片9和第四压电陶瓷片10表面电极同时接通二阶激励信号的正极输出,给单模压电振子1金属表面接通二阶激励信号的负极输出。
47.参照图7,两对压电陶瓷片接入二阶激励信号e2=v2sin(ω2t):参见图7的t0时刻和图8的t0时刻,以该时刻为初始状态,在该初始状态下,转子机构处于初始位置。
48.参见图7,t0-t1’时刻,定子机构处于二阶平面收缩扩张振动模态的收缩形变状态,第一圆弧面11和第二圆弧面18表面质点的运动轨迹为经过第三象限的斜线轨迹(θ 》 0);单模压电振子1与转子机构的一对转子的圆锥面接触,通过定转子之间的摩擦耦合驱动转子逆时针转动一定角度。参见图11,t0-t1时刻波峰处,定子机构处于一阶平面收缩扩张振动模态的最小收缩形变状态,转子机构相对于初始位置处于逆时针转动角度最大处。
49.参见图7,t1
’‑
t2’时刻,定子机构处于二阶平面收缩扩张振动模态的扩张形变状态,第一圆弧面11和第二圆弧面12表面质点的运动轨迹为经过第一象限的斜线轨迹(θ 》 0);单模压电振子1与转子机构的一对转子的圆锥面脱离,通过定转子之间的摩擦耦合带动转子顺时针回转一定角度,该角度小于t0-t1时刻逆时针旋转角度。参见图11,t1-t2时刻波谷处,定子机构处于一阶平面收缩扩张振动模态的最大扩张形变状态,转子机构相对于初始位置逆时针转动一定角度,相对于t1时刻顺时针后退一点。
50.当驱动信号在t0-t1
’‑
t2’循环工作时,转子机构的位置在图8、图11和图12中的t0-t1
’‑
t2’循环运动。在多个周期运动下,动子持续往逆时针方向转动。
51.本领域的技术人员容易理解,以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本
发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。