超声波换能器、超声波传感器、物体检测装置、物体检测方法以及物体检测程序
1.相关申请的交叉引用
2.本技术基于2020年3月20日申请的日本专利申请编号2020-50359的优先权,并在此通过参照编入其记载内容。
技术领域
3.本公开涉及超声波换能器以及具备该超声波换能器的超声波传感器。另外,本公开涉及使用所述的超声波换能器检测物体的物体检测装置以及物体检测方法、及由所述的物体检测装置执行的物体检测程序。
背景技术:
4.专利文献1所记载的超声波收发器具备大小不同的两个有底筒状壳体。具体而言,所述的超声波收发器具有:将形状较大的一个有底筒状壳体的底面与另一个有底筒状壳体的开口部固定,并将压电元件粘贴到该另一个有底筒状壳体的底面外部的结构。
5.根据这样的结构,能够使一个超声波收发器产生不同的两个共振频率。由此,能够通过一个超声波收发器进行近距离以及远距离的检测。具体而言,例如为了检测远距离,使指向特性锐化,以消除地面等所引起的误检测。
6.专利文献1:日本特开2009-267472号公报
7.在专利文献1所记载的超声波收发器中,不同的两个共振频率各自的指向特性均在中心轴上成为最大声压,并成为以该中心轴为中心的轴对称的纺锤形状。不同的两个共振频率彼此的指向特性的差异主要表现为指向角即声压半衰角的差异。因此,例如难以区分近距离检测出的物体是从地面突出的车轮止滑器等低高度突起物还是存在于超声波收发器的正面的墙壁等高高度构造物。
技术实现要素:
8.本公开是鉴于上述所例示的情况等而完成的。即,本公开例如提供与以往技术相比物体检测性能优异的超声波换能器、以及具备该超声波换能器的超声波传感器。或者,本公开例如提供使用所述的超声波换能器检测物体的物体检测装置、物体检测方法以及物体检测程序。
9.根据本公开的一个观点,超声波换能器具备:
10.换能器壳体,形成为具有侧板部和底板部的有底筒状,上述侧板部形成为包围中心轴的筒状,上述底板部封闭与上述中心轴平行的轴向上的上述侧板部的一端侧以构成能够进行超声波振动的隔膜;以及
11.超声波元件,以面对由上述侧板部和上述底板部包围的内部空间的方式固定地支承于上述底板部,并对电信号和超声波振动进行转换,
12.上述超声波元件配置在相对于与上述轴向正交的面内方向上的上述隔膜的中心
位置向上述面内方向偏移的位置,以能够生成具有第一指向特性的第一发送波和具有第二指向特性的第二发送波,上述第二指向特性是与上述第一指向特性不同的指向特性且降低上述轴向的声压。
13.根据本公开的另一个观点,超声波传感器具备:
14.上述超声波换能器;以及
15.控制电路元件,与上述超声波换能器电连接,以切换上述第一振动模式和上述第二振动模式,
16.上述控制电路元件通过驱动设置于上述中心位置的上述超声波元件而不驱动设置在与上述中心位置不同的上述位置的上述超声波元件来生成上述第一发送波,并且通过不驱动设置于上述中心位置的上述超声波元件而驱动设置在与上述中心位置不同的上述位置的上述超声波元件来生成上述第二发送波。
17.根据本公开的又一个观点,超声波传感器具备:
18.上述超声波换能器;以及
19.控制电路元件,与上述超声波换能器电连接,以切换上述第一振动模式和上述第二振动模式,
20.上述控制电路元件以同相和反相之间切换一对上述超声波元件的驱动定时。
21.根据本公开的又一个观点,物体检测装置构成为使用上述超声波换能器来检测存在于搭载有上述超声波换能器的车辆的周围的物体。
22.该物体检测装置具备:
23.振幅信息获取部,获取与从上述超声波换能器发送的发送波被上述物体反射的反射波的振幅对应的振幅信息;
24.测距信息获取部,基于上述反射波来获取与上述物体的距离所对应的测距信息;以及
25.判定部,根据基于具有在上述车辆的车高方向隔着上述中心轴对称的上述第二指向特性的上述发送波亦即上述第二发送波的上述反射波所获取的上述测距信息以及/或者上述振幅信息,来判定成为上述车辆的行进的障碍的上述物体亦即障碍物的存在。
26.根据本公开的又一个观点,物体检测方法是使用上述超声波换能器来检测存在于搭载有上述超声波换能器的车辆的周围的物体的方法,包含以下的处理或者步骤:
27.获取与从上述超声波换能器发送的发送波被上述物体反射的反射波的振幅对应的振幅信息;
28.基于上述反射波来获取与上述物体的距离所对应的测距信息;以及
29.根据基于具有在上述车辆的车高方向隔着上述中心轴对称的上述第二指向特性的上述发送波亦即上述第二发送波的上述反射波所获取的上述测距信息以及/或者上述振幅信息,来判定成为上述车辆的行进的障碍的上述物体亦即障碍物的存在。
30.根据本公开的又一个观点,物体检测程序是由物体检测装置执行的程序,该物体检测装置构成为使用上述超声波换能器来检测存在于搭载有该超声波换能器的车辆的周围的物体,
31.由上述物体检测装置执行的处理包含:
32.获取与从上述超声波换能器发送的发送波被上述物体反射的反射波的振幅对应
的振幅信息的处理;
33.基于上述反射波,来获取与上述物体的距离所对应的测距信息的处理;以及
34.根据基于具有在上述车辆的车高方向隔着上述中心轴对称的上述第二指向特性的上述发送波亦即上述第二发送波的上述反射波获取的上述测距信息以及/或者上述振幅信息,来判定成为上述车辆的行进的障碍的上述物体亦即障碍物的存在的处理。
35.此外,在申请文件的各部分中,有对各要素标注带括号的参照附图标记的情况。然而,这样的参照附图标记只不过示出该要素与后述的实施方式所记载的具体单元的对应关系的简单的一个例子。因此,本公开并不受上述的参照附图标记的记载的任何限定。
附图说明
36.图1是表示搭载有第一实施方式的超声波传感器的车辆的外观的立体图。
37.图2是表示图1所示的超声波传感器的示意性的装置构成的剖视图。
38.图3是表示图2所示的超声波换能器的第一构成例的仰视图。
39.图4是表示图2所示的超声波换能器的第二构成例的立体图。
40.图5a是表示设置于图4所示的换能器壳体的隔膜中的第一振动模式的剖视图。
41.图5b是表示设置于图4所示的换能器壳体的隔膜中的第一振动模式的立体图。
42.图6a是表示设置于图4所示的换能器壳体的隔膜中的第二振动模式的剖视图。
43.图6b是表示设置于图4所示的换能器壳体的隔膜中的第二振动模式的立体图。
44.图7是表示图3以及图4所示的超声波换能器中的指向特性的图。
45.图8是表示图2所示的超声波换能器的第三构成例的立体图。
46.图9是表示图2所示的超声波换能器的第四构成例的剖视图。
47.图10是图9所示的超声波换能器的仰视图。
48.图11是表示图2所示的超声波换能器的第五构成例的立体图。
49.图12是图11所示的超声波换能器的剖视图。
50.图13是表示对设置于图11以及图12所示的超声波换能器的一对超声波元件进行同相驱动的情况下的指向特性的图。
51.图14是表示对设置于图11以及图12所示的超声波换能器的一对超声波元件进行反相驱动的情况下的指向特性的图。
52.图15是表示图2所示的超声波换能器的第六构成例的立体图。
53.图16是图15所示的超声波换能器的剖视图。
54.图17是表示图15以及图16所示的超声波换能器中的指向特性的图。
55.图18是表示图15以及图16所示的超声波换能器中的指向特性的图。
56.图19是表示第二实施方式的物体检测装置的概略结构的框图。
57.图20是表示图19所示的物体检测装置的动作概要的示意图。
58.图21是表示图19所示的物体检测装置的第一动作例的流程图。
59.图22是表示图19所示的物体检测装置的第二动作例的流程图。
60.图23是表示图19所示的物体检测装置的第三动作例的概要的图。
61.图24是表示图19所示的物体检测装置的第三动作例的流程图。
62.图25是表示图19所示的物体检测装置的第四动作例的流程图。
63.图26是表示图19所示的物体检测装置的第五动作例的流程图。
64.图27是表示图19所示的物体检测装置的第六动作例的流程图。
65.图28是表示第三实施方式的物体检测装置的概略结构的框图。
66.图29是表示图28所示的物体检测装置的动作例的流程图。
67.图30是表示搭载有第四实施方式的物体检测装置的车辆的外观的立体图。
具体实施方式
68.以下,基于附图对本公开的实施方式进行说明。此外,对于能够对一个实施方式应用的各种变形例而言,若插入到与该实施方式有关的一系列的说明的中途则有可能会妨碍该实施方式的理解。因此,变形例不插入到与该实施方式有关的一系列的说明的中途,而在之后集中进行说明。
69.(第一实施方式:传感器结构)
70.若参照图1,则车辆v是所谓的四轮汽车,具备箱状的车体v1。在车体v1的前端部安装有作为车体部件的前保险杠v2。在车体v1的后端部安装有作为车体部件的后保险杠v3。
71.超声波传感器1是所谓的车载的间隙声纳,安装于前保险杠v2以及后保险杠v3。在前保险杠v2以及后保险杠v3设置有用于安装超声波传感器1的贯通孔亦即安装孔v4。设置于前保险杠v2的安装孔v4形成为在保险杠外表面v5朝向前保险杠v2的外部即、前方开口。以下,将超声波传感器1搭载于车辆v的状态即、搭载于前保险杠v2或者后保险杠v3的状态称为“车载状态”。另外,有时将搭载有超声波传感器1的车辆v称为“本车辆”。
72.(超声波传感器)
73.图2以安装于前保险杠v2的车载状态示出超声波传感器1的整体构成。为了方便说明,如图示那样将右手系xyz正交坐标系设定为y轴与中心轴da平行、且在车载状态下z轴与车高方向平行。中心轴da是沿着超声波传感器1中的超声波的发送接收方向延伸的虚拟直线。将与中心轴da平行的方向称为“轴向”。车高方向是在水平面上稳定地载置本车辆的状态下的与重力作用方向平行的方向。另外,有时将图2中的上侧即、y轴正方向侧称为轴向的“前端侧”。同样地,有时将图2中的下侧即、y轴负方向侧称为轴向的“基端侧”。并且,有时将与轴向正交的任意的方向称为“面内方向”。即,“面内方向”是与xz平面平行的方向。
74.若参照图2,则在本实施方式中,超声波传感器1以中心轴da呈水平的方式搭载于本车辆。超声波传感器1具备:传感器壳体2、弹性保持部件3以及超声波换能器4。超声波换能器4具备换能器壳体5和超声波元件6。以下,对构成超声波传感器1的各部的结构进行说明。
75.构成超声波传感器1的外壳的传感器壳体2由聚丙烯等硬质的合成树脂一体形成。传感器壳体2具有:壳体主体部21、连接器部22以及壳体筒部23。
76.壳体主体部21形成为轴向的基端侧开口的箱状。设置有连接器部22以将超声波传感器1与ecu电连接。ecu是electronic control unit的省略。连接器部22从壳体主体部21中的侧壁部朝向远离中心轴da的外侧延伸配置。
77.传感器壳体2中的包围中心轴da的圆筒状的部分亦即壳体筒部23从壳体主体部21朝向轴向的前端侧突出设置。壳体筒部23构成为保持弹性保持部件3的轴向上的基端部。壳体筒部23的内侧的缸状的空间被设置为与壳体主体部21的内侧的空间连通。在传感器壳体
2内配置有电路基板24、控制电路元件25、布线部26、减震部件27以及壳体填充材料28。
78.电路基板24收容于壳体主体部21。在电路基板24安装有控制超声波传感器1的动作的控制电路元件25。控制电路元件25是所谓的集成电路元件,构成为控制超声波换能器4中的发送接收动作。布线部26被设置为将超声波换能器4与电路基板24电连接。即,控制电路元件25经由设置于电路基板24的未图示的电路以及布线部26与超声波换能器4电连接。
79.减震部件27被设置为抑制从超声波换能器4向传感器壳体2的振动传递。具体而言,减震部件27由具有绝缘性且弹性的发泡硅酮等发泡弹性体形成。减震部件27形成为具有与弹性保持部件3的内径对应的外径的圆盘状。减震部件27在比轴向上的与超声波换能器4更靠基端侧嵌入到弹性保持部件3的内侧的缸状的空间内。
80.在传感器壳体2的内侧的空间填充有壳体填充材料28。壳体填充材料28由硅酮橡胶等具有绝缘性的合成树脂材料形成。
81.弹性保持部件3形成为以中心轴da为轴中心的圆筒形状。弹性保持部件3被保持在设置于传感器壳体2的壳体筒部23的轴向上的前端部。弹性保持部件3由具有绝缘性且弹性的硅酮橡胶等合成树脂系弹性材料形成。
82.弹性保持部件3构成为在使超声波换能器4的轴向上的前端面露出并且覆盖基端侧的状态下支承超声波换能器4。即,超声波换能器4经由弹性保持部件3被传感器壳体2弹性支承。
83.(超声波换能器)
84.超声波换能器4具有作为发送接收一体型的超声波麦克风的功能。即,超声波换能器4构成为能够发送接收超声波。具体而言,超声波换能器4构成为发送作为超声波的发送波。另外,超声波换能器4构成为接收存在于本车辆的周围的物体反射的发送波的反射波,并产生与接收的反射波的强度以及频率对应的信号。
85.(第一构成例)
86.以下,参照图2以及图3,对本实施方式的超声波换能器4的结构的详细进行说明。此外,图3所示的右手系xyz正交坐标系与图2所示的右手系xyz正交坐标系相同。
87.换能器壳体5形成为包围中心轴da的有底筒状。在本实施方式中,换能器壳体5具有将中心轴da作为轴中心的圆柱状的外形形状。另外,换能器壳体5由铝等金属无缝地一体形成。
88.换能器壳体5具有能够进行超声波振动的隔膜50。隔膜50是换能器壳体5中的具有与轴向平行的厚度方向的薄板状的部分,被设置为将外缘部作为固定端即波节位置挠曲变形并且以超声波频带内的规定频率振动。
89.在本实施方式中,隔膜50形成为厚度恒定的平板状。另外,如图3所示,隔膜50形成为具有相互正交的长边方向以及短边方向的椭圆形。具体而言,隔膜50形成为将z轴方向作为长边方向并将x轴方向作为短边方向的圆角长方形或者长圆状。由此,超声波换能器4构成为在z轴方向具有比x轴方向窄的指向角。以下,将隔膜50的椭圆形状中的长边方向仅称为“长边方向”。对于“短边方向”也相同。
90.即,隔膜50由被一对圆弧部50a和一对弦部50b包围的区域形成。圆弧部50a以朝向中心轴da开口的方式设置在长边方向上的隔膜50的两端部。弦部50b在短边方向上的隔膜50的两端部沿长边方向延伸配置,以将一对圆弧部50a的相互对置的端部彼此连接。
91.换能器壳体5具有侧板部51和底板部52。侧板部51形成为包围中心轴da的筒状。构成隔膜50的底板部52被设置为封闭侧板部51的轴向上的一端侧即、前端侧。底板部52与侧板部51的轴向上的前端部无缝地一体结合。被侧板部51和底板部52包围的内部空间53被设置为朝向轴向上的基端侧开口。
92.侧板部51具有薄壁部511和厚壁部512。薄壁部511形成为在与中心轴da正交的径向具有规定厚度的部分圆筒状。“径向”是从中心轴da呈放射状延伸的方向。即,径向是在将中心轴da作为法线的平面上,描绘出将该平面与中心轴da的交点作为中心的虚拟圆的情况下的该虚拟圆的半径方向。
93.薄壁部511设置在椭圆形状的隔膜50的长边方向上的两端部即、在周向上与圆弧部50a对应的位置。“周向”是上述的虚拟圆的圆周方向。一对薄壁部511配置为隔着中心轴da相互对置。
94.厚壁部512在径向比薄壁部511厚地形成。厚壁部512设置在椭圆形状的隔膜50的短边方向上的两端部即、在周向与弦部50b对应的位置。一对厚壁部512配置为隔着中心轴da相互对置。在基于与中心轴da正交的剖面的剖视时,厚壁部512形成为弓形。
95.底板部52中的面对内部空间53的表面亦即内面521是构成隔膜50的底面的表面,形成为与隔膜50相同形状的椭圆形。底板部52即、隔膜50中的内面521的背面即相反侧的面亦即外面522被设置为朝向露出方向dd露出。露出方向dd是与轴向平行且从内面521朝向外面522的方向。在外面522上形成有与保险杠外表面v5同色的涂装膜等未图示的保护膜。通过所述的保护膜的与外面522的接合面相反侧的外表面形成超声波换能器4的轴向上的前端面。
96.换能器壳体5构成为在由侧板部51和底板部52包围的内部空间53保持超声波元件6。即,超声波元件6以面对内部空间53的方式固定地支承于底板部52。具体而言,超声波元件6在内面521侧固定于隔膜50。
97.超声波元件6构成为对电信号和超声波振动进行转换。具体而言,超声波元件6是压电元件,形成为在轴向具有厚度方向的薄膜状。
98.在本实施方式中,在隔膜50仅设置有一个超声波元件6。另外,超声波元件6配置在相对于面内方向上的隔膜50的中心位置pc向面内方向即径向偏移的位置。中心位置pc是中心轴da与内面521的交点的位置。
99.超声波元件6在与y轴平行的视线观察时的平面形状形成为圆形。超声波元件6被设置为在车载状态下元件中心pp从中心位置pc向垂直上方即z轴正方向侧偏移。元件中心pp是面内方向上的超声波元件6的外形形状的中心。具体而言,在超声波元件6的平面形状为圆形或者椭圆形的情况下,元件中心pp是圆形或者椭圆形的中心。
100.本实施方式的超声波换能器4构成为通过如上述那样设置超声波元件6,能够生成具有第一指向特性的第一发送波和具有第二指向特性的第二发送波。第一指向特性是在中心轴da上成为最大声压的纺锤形状的指向特性(即、图7中的虚线所示的指向特性),也能够称为通常的指向特性。第二指向特性是与第一指向特性不同的指向特性,是降低轴向的声压的指向特性(即图7中的实线所示的指向特性)。即,第二指向特性是在保持隔着z轴方向的中心轴da的对称性的同时,显著地降低第一指向特性那样的纺锤形状的指向特性中的中心轴da上的声压的“心”形的指向特性。此外,第二指向特性中的隔着z轴方向的中心轴da的“对称性”并不要求数值上的完全对称,而允许能够称为“实际对称”或者“大致对称”的程度的差。
101.中心位置pc是与第一指向特性对应的隔膜50的第一振动模式下的波腹位置,并且是与第二指向特性对应的隔膜50的第二振动模式下的波节位置。在本实施方式中,超声波元件6设置在与中心位置pc不同的位置。即,超声波元件6在面内方向上配置在不与中心位置pc重叠的位置。换句话说,在以与y轴平行的视线观察的情况下即、在将超声波元件6和中心位置pc投影到xz平面上的情况下,中心位置pc设置在超声波元件6的外形形状的外侧。或者,超声波元件6配置在铅垂线lz上的中心位置pc与薄壁部511之间。铅垂线lz是包含中心轴da且与yz平面平行的平面和包含内面521且与xz平面平行的平面的交线。与此相对,将包含中心轴da且与xy平面平行的平面和包含内面521且与xz平面平行的平面的交线称为水平线lx。
102.在本实施方式中,超声波元件6配置于第二振动模式时的波腹位置。具体而言,超声波元件6被设置为元件中心pp的面内方向位置与第二振动模式时的波腹位置一致。
103.(第二构成例)
104.图4所示的超声波换能器4是从上述构成变更了换能器壳体5的形状的超声波换能器。即,在图4所示的超声波换能器4中,换能器壳体5的侧板部51具有均匀的厚度并形成为包围中心轴da的圆筒状。换句话说,图4所示的结构与在图3所示的结构中将厚壁部512变更为薄壁部511的结构对应。
105.(效果)
106.以下,参照各附图对基于本实施方式的结构的动作的概要以及通过该结构起到的效果进行说明。
107.在具有上述结构的超声波传感器1中,若驱动收容在有底筒状的换能器壳体5的内侧的超声波元件6,则超声波元件6进行超声波振动。通过超声波元件6进行超声波振动,激励换能器壳体5。这样一来,由换能器壳体5和超声波元件6构成的超声波换能器4在规定的振动模式下振动。由此,从隔膜50沿着露出方向dd发出发送波。
108.以下,为了简化说明,使用图4所示的换能器壳体5中的振动模式,对超声波换能器4的指向特性进行说明。图5a以及图5b示出基于共振频率f1的第一振动模式。图6a以及图6b示出基于共振频率f2的第二振动模式。f1<f2。图5a以及图6a中的双点划线示出隔膜50的振动的情况。图5b以及图6b以交叉影线的浓度示出隔膜50的振幅分布。
109.图3以及图4所示的换能器壳体5的构造能够使第一振动模式和第二振动模式产生。通过控制电路元件25中的超声波元件6的驱动频率的切换来执行基于共振频率f1的第一振动模式与基于共振频率f2的第二振动模式之间的切换。“驱动频率”是指施加给超声波元件6的交流电压亦即元件驱动电压的频率。
110.如图5a以及图5b所示,第一振动模式是隔膜50整体沿着y轴在同一方向上挠曲变形的振动模式。在第一振动模式下,波节位置为隔膜50的径向外缘部,波腹位置为中心位置pc。
111.如图6a以及图6b所示,第二振动模式是隔膜50的比水平线lx更靠z轴方向的一侧向y轴正方向侧挠曲变形,而另一侧向y轴负方向侧挠曲变形的振动模式。在一侧和另一侧,振幅的大小隔着水平线lx大致对称。在第二振动模式下,在包含中心位置pc的水平线lx上
和隔膜50的径向外缘部产生波节位置。在中心位置pc与侧板部51的中间位置处,在铅垂线lz上产生两处波腹位置。
112.通过将超声波元件6设置于振动模式时的波腹位置或者其附近,从而良好地激励隔膜50。另一方面,若将超声波元件6设置在振动模式时的波节位置或者其附近,则难以良好地将隔膜50激励至能够发送发送波的程度。
113.对于这一点,能够良好地发出基于第一振动模式的第一发送波的隔膜50中的超声波元件6的面内位置存在于以作为波腹位置的中心位置pc为中心的较宽范围中。具体而言,例如如图3以及图4所示,存在超声波元件6的径向尺寸为隔膜50的径向尺寸的1/2~1/4左右的情况。该情况下,只要将超声波元件6配置在面内方向上的隔膜50的范围内,则能够不管超声波元件6的面内位置而良好地产生第一振动模式。
114.与此相对,若将超声波元件6设置在作为波节位置的中心位置pc,则几乎不能够使第二振动模式产生。对于这一点,若使超声波元件6的元件中心pp从中心位置pc偏移,则根据偏移量,第二振动模式的产生程度提高。通过将超声波元件6设置在与中心位置pc不同的位置即、在面内方向不与中心位置pc重叠的位置,可以以能够接收来自外部的物体的反射波的程度的良好的强度发送基于第二振动模式的第二发送波。特别是,通过将超声波元件6设置为元件中心pp的面内方向位置与第二振动模式的波腹位置一致,从而第二振动模式的激励效率提高。
115.图7表示沿着铅垂线lz的指向特性。在图7中,虚线表示第一发送波的指向特性,实线表示第二发送波的指向特性。如图7所示,第一发送波从隔膜50的中心具有规定的指向性即、指向角且呈放射状传播。因此,第一发送波具有在y轴正方向即超声波换能器4的正面亦即露出方向dd成为最大声压的纺锤形状的指向特性。即,第一发送波作为沿着铅垂线lz的指向特性,可以说几乎无指向性。
116.由此,能够从高高度构造物、低高度突起物以及顶棚突出物中的任何一种接收第一发送波的反射波。高高度构造物是在超声波换能器4的正面即本车辆的正面存在的墙壁等比较高的高度的构造物。低高度突起物是从地面朝向上方突出的车轮止滑器等比较低的高度的突起物。顶棚突出物是从顶棚朝向下方突出的梁或者闸门等。
117.与此相对,第二发送波中的第二指向特性与第一发送波中的第一指向特性不同,降低轴向的声压。具体而言,在第二发送波中,显著地降低露出方向dd的声压,并且在相对于露出方向dd上下成仰角θ的方向上成为最大声压。角度θ由隔膜50中的超声波元件6的面内位置以及超声波元件6的面内形状等决定,例如能够设定为5~15度左右。
118.即,第二发送波成为在保持隔着中心轴da的对称性的同时显著地降低中心轴da上的声压的“心”形,作为沿着铅垂线lz的指向特性。第二发送波与第一发送波不同,轴向的声压未达到能够良好地接收来自物体的反射波的程度的规定声压。换句话说,第二发送波中的第二指向特性与第一发送波的第一指向特性相比,轴向的声压被降低。因此,几乎不从超声波换能器4的正面亦即露出方向dd接收第二发送波的被物体反射的反射波,另一方面从与露出方向dd成角度θ的方向良好地接收第二发送波的被物体反射的反射波。
119.因此,超声波传感器1即、超声波换能器4以第二发送波的指向特性在车高方向隔着中心轴da对称的方式搭载于本车辆。这样一来,对于第二发送波的反射波,不从高高度构造物接收,而从低高度突起物以及顶棚突出物接收。但是,顶棚突出物很少会成为本车辆的
行进的障碍,即使成为障碍也可以根据目视明确。
120.这样,在指向特性相互较大地不同的第一发送波和第二发送波中,检测区域即、能够接收反射波的物体中的反射点的存在范围不同。具体而言,在本实施方式中,在第一发送波和第二发送波之间,反射点的仰角范围不同。由此,通过利用驱动频率变更切换第一发送波和第二发送波,从而容易区分近距离检测到的物体是低高度突起物还是高高度构造物。
121.对于这一点,根据本实施方式,能够通过发送频率即驱动频率的切换简单地进行像这样指向特性相互较大地不同的第一发送波和第二发送波的切换。另外,能够通过将超声波元件6相对于中心位置pc向面内方向偏移配置这样的从以往构成的最小限度的规格变更来实现能够进行这样的第一发送波与第二发送波的切换的超声波换能器4。由此,在提供与以往技术相比物体检测性能优异的超声波换能器4以及具备该超声波换能器的超声波传感器1时,能够尽可能地制抑制造成本上升,或确保良好的耐久性。并且,通过将超声波元件6在面内方向配置在与中心位置pc不同的位置,能够在第一发送波与第二发送波之间设置显著的指向特性之差(即检测区域之差)。
122.本实施方式的超声波传感器1具备:所述的超声波换能器4;以及控制电路元件25,与超声波换能器4电连接以切换第一振动模式与第二振动模式。因此,根据本实施方式,能够提供与以往相比物体检测性能更优异的超声波换能器4以及具备该超声波换能器的超声波传感器1。
123.与此相对,在日本特开2009-267472号公报以及日本特开2010-278913号公报所记载的结构中,虽然能够以相互不同的两个共振频率进行发送接收,但彼此的指向特性之差较小。因此,根据这些以往的结构,不能够使相互不同的两个共振频率之间产生本实施方式那样的有关检测区域的较大的差。
124.(第三构成例)
125.图8是变更了图3以及图4所示的超声波换能器4中的换能器壳体5的结构的一部分的图。在以下的构成例的说明中,主要对与上述的第一以及第二的构成例不同的部分进行说明。另外,在上述的第一以及第二的构成例和以下进行说明的构成例中,对相互相同或者同等的部分附加相同的附图标记。因此,在以下的构成例的说明中,对于具有与上述的第一以及第二的构成例相同的附图标记的构成要素,只要没有技术矛盾或者特别的追加说明,则能够适当地引用上述的第一以及第二的构成例中的说明。
126.图8所示的换能器壳体5具有突起部523。突起部523以向内部空间53侧突出的方式设置于底板部52。突起部523能够配置在连接中心位置pc与元件中心pp的直线上。根据所述的结构,能够良好地促进第二振动模式的产生。突起部523的个数在一个以上。
127.此外,突起部523的面内位置、形状以及个数能够根据共振频率f2以及/或者共振频率f1与共振频率f2之差适当地设定。另外,优选突起部523配置在通过中心位置pc与元件中心pp的直线上。由此,能够实现图6b所示那样的第二振动模式下的良好的振动状态。
128.(第四构成例)
129.图9以及图10是变更了图3以及图4所示的超声波换能器4中的换能器壳体5的结构的一部分的图。
130.图9以及图10所示的换能器壳体5具有突起部523。突起部523以向内部空间53突出的方式设置于侧板部51。具体而言,在如图9以及图10所示的换能器壳体5中隔着中心轴da
对称地配置有一对突起部523。根据这样的结构,能够良好地促进第二振动模式的产生。
131.此外,突起部523的形状能够根据共振频率f2、以及/或者共振频率f1与共振频率f2之差适当地设定。另外,优选突起部523配置在通过中心位置pc与元件中心pp的直线上即、铅垂线lz上。由此,能够实现图6b所示那样的第二振动模式下的良好的振动状态。另外,能够并用根据本构成例的设置在侧板部51的突起部523和根据上述第三构成例的设置在底板部52的突起部523。
132.(第五构成例)
133.图11以及图12是变更了图3以及图4所示的超声波换能器4的结构的一部分的图。
134.在图11以及图12所示的超声波换能器4中,在隔膜50隔着中心位置pc对称地设置有一对超声波元件6。即,在隔膜50中,在与中心位置pc不同的位置安装有两个超声波元件6。一对超声波元件6分别配置在第二振动模式下的波腹位置。
135.在图11以及图12所示的超声波换能器4中,能够以同相和反相切换一对超声波元件6的驱动定时。“同相”是指施加给一对超声波元件6的一方的规定频率的交流电压亦即第一元件驱动电压与施加给另一方的交流电压亦即与第一驱动电压相同频率的第二元件驱动电压之间的相位差实际为零。与此相对,“反相”是指上述的相位差为与上述的规定频率对应的周期的一半周期量。所述的切换由图2所示的控制电路元件25执行。
136.图13示出通过驱动频率f1以驱动定时同相驱动一对超声波元件6的情况下的指向特性。图14示出通过驱动频率f2以驱动定时反相驱动一对超声波元件6的情况下的指向特性。在图13以及图14中,虚线表示与第一振动模式对应的指向特性,实线表示与第二振动模式对应的指向特性。
137.如图13所示,在同相驱动时,良好地激励基于第一振动模式的振动,而几乎不激励基于第二振动模式的振动。与此相对,如图14所示,在反相驱动时,良好地激励基于第二振动模式的振动,而基于第一振动模式的振动非常小。此外,通过将一对超声波元件6分别配置于第二振动模式下的波腹位置,能够提高基于第二振动模式的振动强度即、第二发送波的发送声压。
138.这样,根据本构成例的超声波换能器4以及具备该超声波换能器的超声波传感器1,能够良好地进行指向特性相互不同的第一发送波与第二发送波的切换。特别是,如图13以及图14所示,能够尽可能地增大相同驱动条件下的第一振动模式与第二振动模式之间的强度比即、s/n比。此外,在接收时,也能够通过使用以同相合成一对超声波元件6各自中的接收信号得到的第一合成信号、以及以反相合成的第二合成信号,来提高两个频率(即f1以及f2)之间的隔离性。
139.在图11以及图12中,换能器壳体5具有突起部523。具体而言,在隔膜50中,在中心位置pc设置有一个突起部523。由此,促进第二振动模式的激励。但是,在起到上述那样的同相驱动与反相驱动的切换所带来的效果的观点下,可以省略这样的突起部523。
140.(第六构成例)
141.图15以及图16是变更了图3以及图4所示的超声波换能器4的结构的一部分的图。在图15以及图16所示的超声波换能器4中,在隔膜50中,在中心位置pc仅设置有一个超声波元件6。所述的超声波元件6被配置为元件中心pp与中心位置pc一致。另外,在隔膜50中,在与中心位置pc不同的位置仅设置有一个超声波元件6。
142.在图15以及图16所示的超声波换能器4中,能够实现以下两种驱动模式。
143.·
第一驱动模式:驱动一对超声波元件6中的设置于中心位置pc的一方,而不驱动设置在与中心位置pc不同的位置的另一方。
144.·
第二驱动模式:不驱动一对超声波元件6中的设置于中心位置pc的一方,而驱动设置在与中心位置pc不同的位置的另一方。
145.通过第一驱动模式,能够生成第一发送波。另一方面,通过第二驱动模式,能够生成第二发送波。第一驱动模式与第二驱动模式之间的切换由图2所示的控制电路元件25执行。
146.图17示出通过驱动频率f1在第一驱动模式下驱动超声波换能器4的情况下的指向特性。图18示出通过驱动频率f2在第二驱动模式下驱动超声波换能器4的情况下的指向特性。在图17以及图18中,虚线示出与第一振动模式对应的指向特性,实线示出与第二振动模式对应的指向特性。如图17以及图18所示,在本构成例中,也能够起到与图11以及图12所示的构成例相同的效果。此外,在本构成例中,能够设置上述第三以及/或者第四构成例中的突起部523。
147.(第二实施方式:物体检测装置)
148.图19示出使用了上述第一实施方式的超声波换能器4的物体检测装置700的整体构成。图20示出搭载有所述的物体检测装置700的车辆v即本车辆中的物体检测动作中的样子。所述的物体检测装置700构成为检测存在于搭载有超声波传感器1即超声波换能器4的本车辆的周围的物体b。以下,参照图19等,对本实施方式的物体检测装置700的结构的详细进行说明。
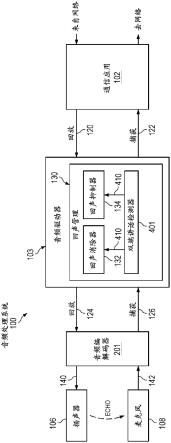
149.物体检测装置700具备:发送部701、接收部702、驱动信号生成部703、接收信号处理部704、发送控制部705、判定部706以及存储器707。在本实施方式中,发送部701、接收部702、驱动信号生成部703以及接收信号处理部704设置于超声波传感器1即图2所示的控制电路元件25。另一方面,发送控制部705、判定部706以及存储器707设置于物体检测ecu708。
150.发送部701被设置为能够朝向外部发送发送波。接收部702被设置为能够接收包含从发送部701发送的发送波的被物体b反射的反射波的接收波。
151.在本实施方式中,超声波传感器1具有发送接收一体型的结构。换句话说,超声波传感器1构成为通过具备一个超声波换能器4而利用该超声波换能器4起到发送接收功能。
152.即,发送部701具有超声波换能器4和发送电路711。发送电路711构成为通过基于输入的驱动信号驱动超声波换能器4而使超声波换能器4发出与驱动信号的频率对应的频率的发送波。具体而言,发送电路711具有数字/模拟转换电路、升压电路等。
153.另外,接收部702具有与发送部701共用的超声波换能器4、和接收电路721。接收电路721构成为生成与超声波换能器4的接收波的接收结果对应的接收信号并输出到接收信号处理部704。具体而言,接收电路721具有放大电路、滤波电路以及模拟/数字转换电路等。
154.驱动信号生成部703被设置为基于从发送控制部705接收的控制信号来生成驱动信号,并向发送部701即发送电路711输出。驱动信号是用于驱动发送部701即超声波换能器4,使发送波从超声波换能器4发送的信号。控制信号是用于控制从驱动信号生成部703向发送部701输出驱动信号的信号。
155.接收信号处理部704被设置为通过对从接收部702输出的接收信号实施各种信号
处理来生成判定部706中的物体检测动作所需要的信息或者信号,并输出到判定部706。具体而言,接收信号处理部704具有振幅信息获取部741和测距信息获取部742。
156.振幅信息获取部741被设置为生成以及输出与从接收电路721输出的接收信号的振幅对应的振幅信号。即,振幅信息获取部741获取与从超声波换能器4发送的发送波被物体b反射的反射波的振幅对应的振幅信息。“振幅信息”是指振幅信号所包含的接收波的振幅即接收强度对应的信息。
157.测距信息获取部742被设置为在接收信号中的振幅超过规定值的情况下,基于该接收信号生成以及输出测距信号。即,测距信息获取部742基于接收物体b对发送波的反射波时的tof,来获取与超声波换能器4和物体b的距离对应的测距信息。tof是time of flight的简写,是从发送波的发送到反射波的接收为止的需要时间。tof也可以被称为传播时间。“测距信息”是测距信号所包含的与超声波换能器4和物体b之间的距离对应的信息。
158.发送控制部705被设置为通过向驱动信号生成部703输出控制信号而控制从发送部701的发送波的发出状态。具体而言,发送控制部705通过控制信号设定在驱动信号生成部703生成以及输出的驱动信号的驱动频率以及输出定时。即,发送控制部705控制发送波的发送定时以及发送波形。
159.判定部706被设置为基于接收信号处理部704对接收信号的各种信号处理结果进行障碍物判定。“障碍物判定”是通过获取测距信息而检测到存在的物体b是成为本车辆的行进的障碍的障碍物的判定。即,障碍物判定是指判定本车辆的周围的障碍物的存在。
160.判定部706构成为根据基于第二发送波的反射波获取的测距信息以及/或者振幅信息来判定障碍物的存在。如上述那样,第二发送波是具有在本车辆的车高方向隔着超声波换能器4的中心轴da对称且降低正面方向的声压的第二指向特性的发送波。
161.在本实施方式中,判定部706基于振幅信息以及/或者测距信息与基于第二指向特性设定的判定阈值的比较结果,进行障碍物判定。具体而言,判定部706具有阈值设定部761。在阈值设定部761中储存有基于第二指向特性设定的判定阈值。而且,阈值设定部761被设置为设定判定部706中的是否存在障碍物的判定中的判定阈值。
162.存储器707被设置为按照时间序列储存接收信号处理部704的信号处理结果和判定部706中的判定结果。即,在存储器707中按照时间序列并且相互建立对应地储存有振幅信息、测距信息以及判定部706中的判定结果。
163.在本实施方式中,发送控制部705、判定部706、以及存储器707被设置为由物体检测ecu708实现的功能构成部。即,物体检测ecu708具有控制物体检测装置700的整体的动作的作为所谓的声纳ecu的结构。物体检测ecu708经由依据规定的通信标准(例如dsi3等)的车载lan通信线路,与超声波传感器1以能够进行信息通信的方式连接。dsi3是distributed system interface 33的简写。
164.物体检测ecu708是搭载于车辆v的微型计算机,具备未图示的cpu、rom、ram、非易失性可重写存储器、输入输出接口等。cpu是central processing unit的简写。rom是read only memory的简写。ram是random access memory的简写。非易失性可重写存储器是在电源接通中能够改写信息,另一方面在电源切断中以不能够改写的方式保持信息的存储介质,例如是eprom、eeprom、闪存等。eprom是erasable programmable read only memory的简写。eeprom是electrically erasable programmable read only memory的简写。rom、非
易失性可重写存储器、以及ram是非过渡实体存储介质。rom以及/或者非易失性可重写存储器相当于存储本实施方式的物体检测程序的非过渡实体存储介质。以下将物体检测ecu708的cpu、rom、ram以及非易失性可重写存储器仅简称为“cpu”、“rom”、“ram”、以及“非易失存储器”。物体检测装置700构成为通过由物体检测ecu708读出存储于rom或者非易失存储器的程序并执行,能够执行本车辆中的物体检测动作以及伴随该动作的报告等各种动作。
165.(动作概要)
166.以下,对本实施方式的物体检测装置700的物体检测动作的概要,即由所述的物体检测装置700执行的物体检测方法或者物体检测程序的概要进行说明。
167.如图20所示,超声波传感器1安装于前保险杠v2。另外,在本实施方式中,超声波传感器1以超声波换能器4的中心轴da从车高中心hc向下方偏移规定量δh的方式搭载于本车辆。即,超声波传感器1被配置为搭载高度hm小于车高hv的一半。车高中心hc是车高方向上的车辆v的中心位置。搭载高度hm是超声波换能器4的中心轴da的距离地面即路面的高度。
168.(第一动作例)
169.参照图19~图21,对本实施方式的物体检测装置700的一动作例进行说明。
170.如图7、图14或者图18中实线所示,超声波传感器1能够发送具有降低中心轴da上的声压且在车高方向上隔着中心轴da对称的第二指向特性的第二发送波。第二发送波在从中心轴da起仰角为
±
θ的方向成为最大声压。因此,典型地,如图20所示,通过第二发送波,在从中心轴da的仰角为
±
θ的方向上检测物体b。
171.在物体b为低高度突起物bl的情况下,在测距距离d小于下述式(1)所示的下侧判定阈值dl时,所述的低高度突起物bl被检测为障碍物。此外,测距距离d是将测距信息换算为实际距离后的距离。
172.[数1]
[0173][0174]
另一方面,对于顶棚突出物bs,在测距距离d小于下述式(2)所示的上侧判定阈值dh的情况下,被检测为障碍物。或者,可以使用下述式(3)所示的顶棚判定阈值ds来代替上侧判定阈值dh。在式(3)中,设计顶棚高hs是车高hv加上规定的设计富余值后的高度。
[0175]
[数2]
[0176][0177]
[数3]
[0178][0179]
但是,顶棚突出物bs很少会成为本车辆的行进的障碍,即使成为障碍也可以根据目视明确。因此,在本动作例中,物体检测ecu708即、判定部706在测距距离d小于下侧判定阈值dl的情况下,进行障碍物判定。即,物体检测ecu708基于测距信息与基于第二指向特性设定的下侧判定阈值dl的比较结果,来判定障碍物的存在。
[0180]
图21示出与本动作例对应的流程图。在所述的流程图中,“s”是步骤的简写。物体检测ecu708的cpu通过从rom或者非易失存储器读出与图21所示的流程图对应的程序(即物
体检测程序)并执行,从而实施物体检测方法。图22等其它附图中的流程图也相同。
[0181]
若超声波传感器1中的反射波的接收定时到来,则由cpu启动图21所示的例程。接收定时是从发送波的发送结束定时起经过了考虑到混响时间的规定的待机时间后的定时。若启动本例程,则首先在步骤2101,cpu获取测距距离d。即,cpu将判定部706从测距信息获取部742获取的最新的测距信息所对应的测距距离d暂时保持于ram中的规定区域。接下来,在步骤2102中,cpu判定测距距离d是否小于下侧判定阈值dl。
[0182]
在测距距离d小于下侧判定阈值dl的情况下(即步骤2102=是),cpu执行步骤2103的处理,之后暂时结束本例程。在步骤2103中,cpu进行障碍物判定。即,cpu判定成为本车辆的行进的障碍的低高度突起物bl的存在。
[0183]
当测距距离d在下侧判定阈值dl以上的情况下(即步骤2102=否),cpu执行步骤2104的处理之后,暂时结束本例程。在步骤2104中,cpu进行非障碍物判定。即,cpu判定成为本车辆的行进的障碍的低高度突起物bl的不存在。
[0184]
(第二动作例)
[0185]
图22是变更了上述的第一动作例的一部分的与第二动作例对应的流程图。本动作例也与上述的第一动作例相同,基于测距信息与基于第二指向特性设定的判定阈值的比较结果,来判定障碍物的存在。
[0186]
具体而言,在本动作例中,物体检测ecu708即、判定部706在测距距离d小于下侧判定阈值dl的情况下,进行路上障碍物判定。路上障碍物判定是在本车辆的行进目的地的路上存在低高度障碍物的判定。另外,当测距距离d在下侧判定阈值dl以上且小于上侧判定阈值dh的情况下,物体检测ecu708进行头顶障碍物判定。头顶障碍物是判定在本车辆的行进目的地的头顶存在的顶棚突出物bs为障碍物的判定。
[0187]
即,图22中的步骤2201的处理内容与图21中的步骤2101的处理内容相同。另外,图22中的步骤2202的判定内容与图21中的步骤2102的判定内容相同。
[0188]
在测距距离d小于下侧判定阈值dl的情况下(即步骤2202=是),cpu执行步骤2203的处理之后,暂时结束本例程。在步骤2203中,cpu进行路上障碍物判定。另一方面,当测距距离d在下侧判定阈值dl以上的情况下(即步骤2202=否),cpu使处理进入步骤2204。在步骤2204中,cpu判定测距距离d是否小于上侧判定阈值dh。
[0189]
在测距距离d小于上侧判定阈值dh的情况下(即步骤2204=是),cpu执行步骤2205的处理,之后本暂时结束本例程。在步骤2205中,cpu进行头顶障碍物判定。
[0190]
当测距距离d在上侧判定阈值dh以上的情况下(即步骤2204=否),cpu执行步骤2206的处理,之后暂时结束本例程。在步骤2206中,cpu进行非障碍物判定。即,cpu判定成为本车辆的行进的障碍的低高度突起物bl以及顶棚突出物bs的不存在。
[0191]
(第三动作例)
[0192]
图23示出基于第二发送波的被低高度突起物bl以及顶棚突出物bs反射的反射波的接收信号的振幅am的伴随测距距离d的变化的变化的样子。在图中,实线表示低高度突起物bl的情况,虚线表示顶棚突出物bs的情况。
[0193]
如图20所示,假定本车辆向前方行驶,而本车辆接近存在于其前方的物体b的情况。该情况下,如图23所示,在距离即测距距离d比规定距离dth远的阶段,在低高度突起物bl与顶棚突出物bs之间,对于振幅am及其变化方式难以发现有意义的差异。另一方面,若距
离接近到规定距离dth,则在低高度突起物bl与顶棚突出物bs之间,振幅am及其变化的方式产生较大的差异。即,对于低高度突起物bl,即使距离变化,振幅am也几乎不变化。与此相对,对于顶棚突出物bs,距离的接近所引起的振幅am的衰减梯度较大。另外,在低高度突起物bl与顶棚突出物bs之间,振幅am产生较大的差异。
[0194]
这样,通过使用具有上下对称并且降低正面方向的声压的大致“心”形的指向特性的第二发送波,在低高度突起物bl与顶棚突出物bs之间,振幅am及其变化方式产生较大的差异。因此,物体检测ecu708即、判定部706基于伴随与测距信息对应的测距距离d的变化的、与振幅信息对应的振幅am的变化方式,来判定障碍物的存在。
[0195]
具体而言,在本动作例中,物体检测ecu708基于振幅变化与基于第二指向特性设定的判定阈值的比较结果,来判定障碍物的存在。更详细而言,在测距距离d小于规定距离dth的状态下的、测距距离d的变化所引起的振幅am的变化的梯度dam/dd小于梯度判定阈值α的情况下,物体检测ecu708进行障碍物判定。
[0196]
图24示出与本动作例对应的流程图。若在超声波传感器1中反射波的接收定时到来,则由cpu启动图24所示的例程。此外,计数器n是用于对本例程的连续启动次数进行计数的计数器,是1以上的整数。计数器n在初次启动时复位为“1”。“初次启动时”是指从规定的物体检测条件成立开始最初启动本例程的时刻。在物体检测条件暂时成立之后不成立,之后,在断开本车辆的点火开关之前物体检测条件再成立的情况下的、从物体检测条件再度立起最初启动本例程的时刻也被设为“初次启动时”。
[0197]
若启动本例程,则首先,cpu在步骤2401中,cpu获取测距距离d(n)。测距距离d(n)是在第n次启动本例程时获取的测距距离d。在步骤2402中,cpu获取振幅am(n)。振幅am(n)是在第n次启动本例程时获取的振幅am。接着,在步骤2403中,cpu按照时间序列(即与计数器n建立对应地)将步骤2401以及步骤2402的获取结果储存于ram或者非易失存储器的规定区域。
[0198]
在步骤2401~步骤2403的处理之后,cpu执行步骤2404的处理。在步骤2404,cpu判定计数器n是否超过1。
[0199]
在计数器n为1的情况下(即步骤2404=否),不能够计算伴随测距距离d的变化的振幅am的变化。因此,该情况下,cpu跳过步骤2405~步骤2408的处理,在步骤2409中使计数器n的值自加1,之后暂时结束本例程。与此相对,在计数器n超过1的情况下(即步骤2404=是),cpu使处理进入步骤2405。
[0200]
在步骤2405中,cpu判定测距距离d是否小于规定距离dth。当测距距离d在规定距离dth以上的情况下(即步骤2405=否),cpu跳过步骤2406~步骤2408的处理,在步骤2409使计数器n的值自加1,之后暂时结束本例程。与此相对,在测距距离d小于规定距离dth的情况下(即步骤2405=是),cpu使处理移至步骤2406。在步骤2406中,cpu判定梯度dam/dd是否超过梯度判定阈值α。
[0201]
在梯度dam/dd小于梯度判定阈值α的情况下(即、步骤2406=是),cpu使处理进入步骤2407。在步骤2407中,cpu进行障碍物判定。即,cpu判定成为本车辆的进行的行进的低高度突起物bl的存在。
[0202]
当梯度dam/dd在梯度判定阈值α以上的情况下(即步骤2406=否),cpu使处理进入步骤2408。在步骤2408中,cpu进行非障碍物判定。即,cpu判定成为本车辆的行进的障碍的
低高度突起物bl的不存在。
[0203]
在步骤2407或者步骤2408的处理执行后,cpu执行步骤2409的处理,并暂时结束本例程。在步骤2409中,cpu使计数器n的值自加1。即,cpu使计数器n的值加1。
[0204]
(第四动作例)
[0205]
图25是变更了上述的第三动作例的一部分的与第四动作例对应的流程图。本动作例也与上述的第三动作例相同,物体检测ecu708即、判定部706基于图23所示那样的伴随与测距信息对应的测距距离d的变化的与振幅信息对应的振幅am的变化方式,来判定障碍物的存在。
[0206]
具体而言,在本动作例中,物体检测ecu708基于振幅am与基于第二指向特性设定的振幅判定阈值β的比较结果,来判定障碍物的存在。更详细而言,在测距距离d小于规定距离dth的状态下,在振幅am超过振幅判定阈值β的情况下,物体检测ecu708进行障碍物判定。
[0207]
即,图25中的步骤2501~步骤2505的处理内容分别与图24中的步骤2401~步骤2405的处理内容相同。在步骤2506中,cpu判定振幅am是否超过振幅判定阈值β。
[0208]
在振幅am超过振幅判定阈值β的情况下(即步骤2506=是),cpu使处理进入步骤2507。在步骤2507中,cpu进行障碍物判定。
[0209]
当振幅am在振幅判定阈值β以下的情况下(即步骤2506=否),cpu使处理进入步骤2508。在步骤2508中,cpu进行非障碍物判定。
[0210]
在步骤2507或者步骤2508的处理执行后,cpu执行步骤2509的处理,之后暂时结束本例程。步骤2509的处理内容与图24中的步骤2409的处理内容相同。
[0211]
(第五动作例)
[0212]
超声波传感器1或者物体检测装置700能够搭载于多个车种的车辆v。对于这一点,根据图20以及式(1)等可知,根据超声波传感器1即超声波换能器4的车载状态下的搭载条件来设定下侧判定阈值dl等判定阈值。
[0213]
然而,超声波传感器1或者物体检测装置700的制造商有可能够与车辆v的制造商不同。因此,超声波传感器1或者物体检测装置700可能有所谓的“后安装”,即在车辆v的占有者从制造商变更为第三方(即,销售商、维修厂、使用者等)之后,搭载于车辆v的情况。
[0214]
另外,可能有在使用者占有中的车辆v中搭载条件变化的情况。具体而言,例如,可能有由于合法地改造车辆v,而车高hv进行变化的情况。或者,例如,可能有车辆v具备所谓的车高调整机构的情况。
[0215]
因此,在本动作例中,物体检测ecu708即、判定部706根据车辆v中的超声波换能器4的搭载条件的变更来变更判定阈值。图26是表示判定阈值的设定或者变更的动作的概要的流程图。
[0216]
按规定定时执行图26所示的阈值设定程序。“规定定时”例如是在车辆v的制造商、销售商或者维修厂中执行规定操作的时刻。或者,“规定定时”例如是接通车辆v的点火开关的时刻,或者,是从所述的时刻到物体检测条件首次成立为止的期间的规定时刻。或者,“规定定时”例如是设置于车辆v的车高调整机构(例如空气悬架机构)的车高调整动作结束的时刻。
[0217]
若启动图26所示的阈值设定程序,则首先在步骤2601中,cpu获取当前的车高hv。例如,能够通过作业者的输入、来自控制车高调整机构的ecu的车高设定信息的接收等获取
车高hv。
[0218]
接下来,在步骤2602中,cpu获取当前的搭载高度hm。例如,能够通过作业者的输入获取搭载高度hm。或者,例如,能够根据在步骤2601获取的车高hv计算搭载高度hm。
[0219]
接着,在步骤2603中,cpu基于获取的车高hv以及搭载高度hm来设定判定阈值。例如能够使用通过实验或者计算机模拟创建的将车高hv以及/或者搭载高度hm作为参数的表格或者映射来设定判定阈值。若步骤2603的处理结束,则cpu暂时结束本例程。
[0220]
(第六动作例)
[0221]
本动作例是使用第一发送波和第二发送波来判定路上障碍物的存在的动作例。该动作例例如在停车支援的场景有效。具体而言,例如有在本车辆朝向停车空间行进时,在停车空间内的行进目的地侧的端部存在车轮止滑器,并且与车轮止滑器相比更靠行进目的地侧存在墙壁的情况。该情况下,即使本车辆的车轮与车轮止滑器抵接而完成停车,该墙壁也不会与本车辆碰撞。因而,该墙壁不是障碍物。
[0222]
根据具有将正面方向作为中心的纺锤形状的指向特性的第一发送波,接收来自车轮止滑器和墙壁双方的反射波。此时,车轮止滑器的仰角位置从成为最高声压的正面方向较大地偏移。因此,来自车轮止滑器的反射波强度较低。与此相对,根据具有上下对称并且降低正面方向的声压的大致“心”形的指向特性的第二发送波,主要接收来自车轮止滑器的反射波。此时,车轮止滑器位于成为最高声压的从中心轴da的仰角θ方向附近。因此,来自车轮止滑器的反射波强度比第一发送波的情况高。
[0223]
因此,在本动作例中,物体检测ecu708即、判定部706基于与第一发送波的反射波对应的振幅和与第二发送波的反射波对应的振幅,来判定障碍物的存在。具体而言,物体检测ecu708对测距距离d大致相同的与第一发送波的反射波对应的振幅am1和与第二发送波的反射波对应的振幅am2进行比较。而且,物体检测ecu708在am1<am2的情况下,视为检测出的物体b为车轮止滑器等低高度突起物bl而进行障碍物判定。
[0224]
图27示出与本动作例对应的流程图。从物体检测条件的成立时刻开始以规定时间间隔,由cpu反复启动图27所示的例程。
[0225]
若启动本例程,则首先在步骤2701中,cpu获取基于发送频率f1亦即第一发送波的物体检测结果。接下来,在步骤2702中,cpu获取基于发送频率f2亦即第二发送波的物体检测结果。接着,cpu使处理进入步骤2703。
[0226]
在步骤2703中,cpu判定是否通过第一发送波检测到物体b。在没有通过第一发送波检测到物体的情况下(即步骤2703=否),cpu跳过步骤2704以后的全部处理,并暂时结束本例程。与此相对,在通过第一发送波检测到物体b的情况下(即步骤2703=是),cpu使处理进入步骤2704。
[0227]
在步骤2704中,cpu判定是否通过第二发送波检测到物体b。在没有通过第二发送波检测到物体的情况下(即步骤2704=否),cpu跳过步骤2705以后的处理的全部,并暂时结束本例程。与此相对,在通过第二发送波检测到物体b的情况下(即步骤2704=是),cpu使处理进入步骤2705。
[0228]
在步骤2705中,cpu对测距距离d大致相同的与第一发送波的反射波对应的振幅am1和与第二发送波的反射波对应的振幅am2进行比较。在am1<am2的情况下(即步骤2705=是),cpu执行步骤2706的处理,之后暂时结束本例程。在步骤2706中,cpu进行路上障碍物
判定。与此相对,在不是am1<am2的情况下(即步骤2705=否),cpu跳过步骤2706的处理,并暂时结束本例程。
[0229]
(第三实施方式)
[0230]
在上述第二实施方式中,对使用了一个超声波传感器1的发送接收结果的物体检测动作进行了说明。然而,如图1所示,在车辆v能够搭载多个超声波传感器1。具体而言,能够在前保险杠v2上在车宽方向上的相互不同的位置搭载有多个(例如三个或者四个)超声波传感器1的各个。对于后保险杠v3也相同。
[0231]
图28示出能够通过具备安装于前保险杠v2的多个超声波传感器1来检测本车辆前方的物体b的物体检测装置700的系统构成。在具有所述的结构的物体检测装置700中,通过将多个超声波传感器1的每个超声波传感器的检测结果统合,从而判定精度提高。因此,在本实施方式中,物体检测ecu708即、判定部706如以下那样判定本车辆前方的障碍物的存在。
[0232]
即,判定部706获取基于与从第一超声波换能器4发送的发送波对应的反射波的障碍物的存在判定结果。另外,判定部706获取基于与从第二超声波换能器4发送的发送波对应的反射波的障碍物的存在判定结果。“第一超声波换能器4”设置于作为安装于前保险杠v2的多个超声波传感器1中的一个的第一超声波传感器1。“第二超声波换能器4”设置于作为安装于前保险杠v2的多个超声波传感器1中的另一个的第二超声波传感器1。第一超声波传感器1和第二超声波传感器1是安装于前保险杠v2并且在车宽方向排列的多个超声波传感器1中的相互相邻的两个。然后,判定部706基于第一超声波传感器1的检测结果和第二超声波传感器1的检测结果来判定本车辆前方的障碍物的存在。
[0233]
图29示出与本实施方式对应的流程图。从物体检测条件的成立时刻开始以规定时间间隔,由cpu反复启动图29所示的程序。
[0234]
若启动本例程,则首先在步骤2901中,cpu获取安装于前保险杠v2的多个超声波传感器1的每个超声波传感器的物体检测结果。接下来,在步骤2902中,cpu判定是否在这些超声波传感器1中的至少一个检测到障碍物。
[0235]
在多个超声波传感器1的每个超声波传感器中没有检测到障碍物的情况下(即、步骤2902=否),cpu跳过步骤2903以后的全部处理,并暂时结束本例程。与此相对,在多个超声波传感器1中的至少一个检测到障碍物的情况下(即步骤2902=是),cpu使处理进入步骤2903。在步骤2903,cpu判定是否通过相邻的两个超声波传感器1检测到同一障碍物。
[0236]
在通过相邻的两个超声波传感器1检测到同一障碍物的情况下(即步骤2903=是),cpu执行步骤2904的处理,之后暂时结束本例程。在步骤2904,cpu进行障碍物判定。
[0237]
在通过相邻的两个超声波传感器1未检测到同一障碍物的情况下(即步骤2903=否),cpu执行步骤2905的处理,之后暂时结束本例程。在步骤2905中,cpu进行非障碍物判定。
[0238]
(第四实施方式)
[0239]
在第三实施方式中,在安装于前保险杠v2的多个超声波传感器1的每个超声波传感器中,搭载高度hm大致相同。该情况下,与多个超声波传感器1的每个超声波传感器对应的判定阈值能够使用同一阈值。对于安装于后保险杠v3的多个超声波传感器1也相同。然而,如图30所示,可能有在安装于前保险杠v2的多个超声波传感器1的每个超声波传感器
中,搭载高度hm并不大致相同的情况。
[0240]
具体而言,在图30所示的例子中,在前保险杠v2安装有四个超声波传感器1。在图中右端的超声波传感器1和与其相邻的超声波传感器1中,超声波换能器4在车高方向上的搭载位置不同。同样地,在图中左端的超声波传感器1和与其相邻的超声波传感器1中,超声波换能器4在车高方向上的搭载位置不同。此外,图中右端的超声波传感器1与图中左端的超声波传感器1也可以超声波换能器4在车高方向上的搭载位置相同。对于从图中右端起第二个超声波传感器1与从图中左端起第二个超声波传感器1也相同。
[0241]
该情况下,搭载条件即、搭载高度hm相互不同的超声波传感器1使用相互不同的判定阈值。通过将由于搭载条件不同而判定阈值不同的多个超声波传感器1中的检测结果统合,从而判定精度进一步提高。
[0242]
(变形例)
[0243]
本公开并不限定于上述实施方式。因此,能够对上述实施方式适当地进行变更。以下,对代表性的变形例进行说明。在以下的变形例的说明中,主要对与上述实施方式的不同点进行说明。另外,在上述实施方式和变形例中,对相互相同或者同等的部分附加相同的附图标记。因此,在以下的变形例的说明中,对于具有与上述实施方式相同的附图标记的构成要素,只要没有技术矛盾或者特别的追加说明,则能够适当地引用上述实施方式中的说明。
[0244]
超声波传感器1并不限定于车载用。即,超声波传感器1能够用于车载的间隙声纳或者角传感器以外的各种用途。
[0245]
超声波传感器1并不限定于能够发送接收超声波的结构。即,例如超声波传感器1也可以具有仅能够进行超声波的发送的结构。换句话说,超声波换能器4既可以是发送接收用,也可以是发送用。
[0246]
超声波换能器4中的各部的结构也并不限定于上述具体例。具体而言,例如超声波换能器4即、换能器壳体5的外形形状并不限定于大致圆柱状,也可以是大致正六棱柱状、大致正八棱柱状等。另外,形成换能器壳体5的材料可以是非金属,也可以是金属与非金属的复合材料。
[0247]
隔膜50的平面形状也没有特别的限定。即,例如在将隔膜50形成为椭圆形的情况下,所述的椭圆形也可以是圆角长方形即、组合了长边方向相互分离的一对半圆和其间的矩形的形状,也可以是椭圆形状。另外,隔膜50的平面形状并不限定于椭圆形状。具体而言,例如隔膜50的平面形状也可以是圆形、正多边形、亚铃状等。
[0248]
侧板部51和底板部52也可以不是无缝地一体形成。即,例如底板部52也可以通过焊接、粘合等各种接合技术与筒状的侧板部51的一端接合。该情况下,侧板部51也可以由与底板部52不同的材料形成。
[0249]
超声波元件6并不限定于压电元件。即,例如能够使用所谓的静电电容型元件作为超声波元件6。超声波元件6的平面形状也并不限定于大致圆形或者大致椭圆形。具体而言,例如超声波元件6也可以形成为与隔膜50的平面形状相似的平面形状(例如相似形)。
[0250]
在物体检测装置700中,可能有分开设置发送用的超声波换能器4和接收用的超声波换能器4的情况。该情况下,在发送电路711电连接有发送用的超声波换能器4。另一方面,在接收电路721电连接有接收用的超声波换能器4。该情况下,只要至少发送用的超声波换能器4具有上述第一实施方式所示的构成即可。即,接收用的超声波换能器4也可以具有以
往的结构。但是,从检测精度的观点来看,优选发送用的超声波换能器4和接收用的超声波换能器4双方具有上述第一实施方式所示的结构。
[0251]
对于构成物体检测装置700的各要素设置于超声波传感器1和物体检测ecu708中的哪一个,也能够从上述具体例适当地变更。即,例如驱动信号生成部703以及/或者接收信号处理部704能够设置于物体检测ecu708。或者,如第三实施方式那样,有将多个超声波传感器1与物体检测ecu708以能够相互进行信息通信的方式进行线路连接,并统合多个超声波传感器1的检测结果的情况。该情况下,也可以将判定部706的功能中的统合多个超声波传感器1的检测结果的功能设置于物体检测ecu708,并将其它功能中的至少一部分设置于超声波传感器1。
[0252]
应用于超声波传感器1与物体检测ecu708之间的线路连接的车载lan通信标准并不限定于dsi。例如,也可以是safe-by-wire、psi5、can(注册商标)等。psi5是peripheral sensor interface 5的简写。can(注册商标)是controller area network的简写。
[0253]
物体检测ecu708的全部或者一部分也可以是具备构成为能够进行上述那样的动作的数字电路,例如asic或者fpga的结构。asic是application specific integrated circuit的简写。fpga是field programmable gate array的简写。即,在物体检测ecu708中,微型计算机部分与数字电路部分能够并存。
[0254]
能够执行在上述实施方式中进行了说明的各种动作、过程或者处理的本公开的程序能够经由v2x通信下载或者升级。v2x是vehicle to x的简写。或者,所述的程序能够经由设置于车辆v的制造工厂、维修厂、销售店等的终端设备下载或者升级。所述的程序的储存目的地也可以是存储卡、光盘、磁盘等。
[0255]
这样,上述的各功能构成以及方法也可以由通过构成被编程为执行通过计算机程序具体化的一个或者多个功能的处理器以及存储器提供的专用计算机来实现。或者,上述的各功能构成以及方法也可以由通过由一个以上的专用硬件逻辑电路构成处理器提供的专用计算机来实现。或者,上述的各功能构成以及方法也可以由通过被编程为执行一个或者多个功能的处理器以及存储器与由一个以上的硬件逻辑电路构成的处理器的组合构成的一个以上的专用计算机来实现。另外,计算机程序也可以作为由计算机执行的指令存储于计算机能够读取的非过渡实体存储介质。即,上述的各功能构成以及方法也能够表现为包含用于实现该功能构成以及方法的顺序的计算机程序或者存储有该程序的非过渡实体存储介质。
[0256]
在代替上侧判定阈值dh而使用顶棚判定阈值ds的情况下,也可以搭载高度hm的从车高中心hc的偏移δh=0。
[0257]
在多数情况下超声波传感器1安装于保险杠。在多数情况下,保险杠安装于比车高中心hc靠下方。因此,搭载高度hm的从车高中心hc的偏移方向通常为下方。使用图20进行了说明的上述的各具体例利用这样的构造上的特征,进行障碍物检测的精度,特别是上下方向的区分。
[0258]
然而,本公开在最广义上并不限定于所述的方式。即,例如超声波传感器1可能有安装于构成车体v1的车身面板的情况。该情况下,搭载高度hm的从车高中心hc的偏移方向有可能是上方。或者,也有可能偏移量δh=0。即使在这样的情况下,只要技术上不矛盾则能够应用上述各实施方式。
[0259]
本公开并不限定于上述实施方式所示的具体的动作例。具体而言,例如在上述各实施方式中,为了简化说明,主要对使用安装于前保险杠v2的超声波传感器1的本车辆前方的障碍物检测的例子进行了说明。然而,本公开并不限定于这样的方式。即,例如也能够与上述各实施方式同样地进行使用安装于后保险杠v3的超声波传感器1的本车辆后方的障碍物检测。对于使用安装于车体v1的侧面的超声波传感器1的本车辆侧方的障碍物检测也相同。
[0260]
上述各动作例中的各处理也能够适当地变化。即,例如在上述各具体例中,执行使用了测距距离d的判定。然而,本公开并不限定于所述的方式。即,即使不将测距信息换算为测距距离d,也能够实现上述各动作例。具体而言,可以使用与测距信息对应的k位的16进制的值来代替测距距离d。该情况下,可以使用与判定阈值对应的k位的16进数的值来代替判定阈值(例如下侧判定阈值dl等)。k例如是2或者4。
[0261]
在上述的各实施方式中,超声波换能器4的搭载仰角即、车载状态下的中心轴da与水平面所成的角大致为0度。然而,本公开并不限定于所述的方式。在搭载仰角不是大致0度的情况下,z轴方向与车高方向所成的角度相当于搭载仰角。这样一来,第二指向特性中的隔着z轴方向的中心轴da的“对称性”成为沿着车高方向的方向的对称性。另外,在设定或者变更与车辆v中的超声波换能器4的搭载条件对应的判定阈值时,也可以考虑搭载仰角。该情况下,在图26所示的流程图中,也可以在步骤2603的处理之前,设置获取搭载仰角的步骤。
[0262]
在各判定处理中,“小于阈值”和“阈值以下”能够互换。同样地,“阈值以上”和“超过阈值”能够互换。即,只要在技术上不矛盾,则各判定步骤中的不等号“<”也可以是“≤”。同样地,只要在技术上不矛盾,则各判定步骤中的不等号“>”也可以是“≥”。
[0263]
在上述的说明中,相互无缝地一体形成的多个构成要素也可以通过使相互独立的部件粘贴来形成。同样地,通过使相互独立的部件粘贴而形成的多个构成要素也可以相互无缝地一体形成。
[0264]
在上述的说明中,由相互相同的材料形成的多个构成要素也可以通过相互不同的材料形成。同样地,由相互不同的材料形成的多个构成要素也可以通过相互相同的材料形成。
[0265]
构成上述实施方式的要素除了特别明示为必须的情况以及原理上清楚地认为是必须的情况等之外,当然未必是必须的。另外,在构成要素的个数、量、范围等的数值被提及的情况下,除了特别明示为必须的情况以及原理上清楚地限定为特定的数目的情况等之外,本公开不会限定于该特定的数值。同样地,在构成要素等的形状、方向、位置关系等被提及的情况下,除了特别明示为必须的情况以及原理上限定为特定的形状、方向、位置关系等的情况等之外,本公开不会限定为其形状、方向、位置关系等。
[0266]“获取”、“计算”、“估计”、“探测”“检测”、“决定”等相似的表现能够在技术上不矛盾的范围内相互适当地进行置换。“探测”或者“检测”与“提取”也能够在技术上不矛盾的范围内适当地进行置换。
[0267]
变形例也并不限定于上述的例示。例如,多个构成例或者实施方式的一个中的全部或者一部分与另一个中的全部或者一部分只要在技术上不矛盾则能够相互组合。组合的数目没有特别的限定。同样地,多个变形例的一个中的全部或者一部分与另一个中的全部
或者一部分只要在技术上不矛盾则能够相互组合。并且,多个实施方式的一个中的全部或者一部分与多个变形例中的一个中的全部或者一部分只要在技术上不矛盾则能够相互组合。
[0268]
(方法
·
程序)
[0269]
通过上述实施方式以及变形例示出的本公开包含与物体检测方法以及物体检测程序有关的以下的各观点。此外,下述的各观点只要在技术上不矛盾则能够相互组合应用。
[0270]
物体检测方法是使用超声波换能器(4)来检测存在于搭载有上述超声波换能器的车辆(v)的周围的物体的方法。物体检测程序是由物体检测装置(700)执行的程序,该物体检测装置构成为使用上述超声波换能器来检测存在于搭载有该超声波换能器的上述车辆的周围的物体。
[0271]
上述超声波换能器具备:
[0272]
换能器壳体(5),形成为具有侧板部(51)和底板部(52)的有底筒状,上述侧板部形成为包围中心轴(da)的筒状,上述底板部封闭与上述中心轴平行的轴向上的上述侧板部的一端侧以构成能够进行超声波振动的隔膜(50);以及
[0273]
超声波元件(6),以面对由上述侧板部和上述底板部包围的内部空间(53)的方式固定地支承于上述底板部,并对电信号和超声波振动进行转换,
[0274]
上述超声波元件配置在相对于与上述轴向正交的面内方向上的上述隔膜的中心位置(pc)向上述面内方向偏移的位置,以能够生成具有第一指向特性的第一发送波和具有第二指向特性的第二发送波,上述第二指向特性是与上述第一指向特性不同的指向特性且降低上述轴向的声压。
[0275]
根据第一观点,通过上述物体检测方法以及由上述物体检测装置执行的处理包含:
[0276]
振幅获取处理,获取与从上述超声波换能器发送的发送波被上述物体反射的反射波的振幅对应的振幅信息;
[0277]
距离获取处理,基于上述反射波来获取与上述物体的距离所对应的测距信息;以及
[0278]
判定处理,根据基于具有在上述车辆的车高方向隔着上述中心轴对称的上述第二指向特性的上述发送波亦即上述第二发送波的上述反射波所获取的上述测距信息以及/或者上述振幅信息,来判定成为上述车辆的行进的障碍的上述物体亦即障碍物的存在。
[0279]
根据第二观点,上述判定处理包含:基于伴随与上述测距信息对应的上述距离的变化的、与上述振幅信息对应的上述振幅的变化方式,来判定上述障碍物的存在的处理。
[0280]
根据第三观点,上述判定处理包含:基于上述振幅或者上述振幅的变化与基于上述第二指向特性所设定的判定阈值的比较结果,来判定上述障碍物的存在的处理。
[0281]
根据第四观点,上述判定处理包含:基于上述测距信息与基于上述第二指向特性所设定的判定阈值的比较结果,来判定上述障碍物的存在的处理。
[0282]
根据第五观点,上述判定处理包含:根据上述车辆中的上述超声波换能器的搭载条件来变更上述判定阈值的处理。
[0283]
根据第六观点,上述判定处理包含:基于上述第一发送波的上述反射波所对应的上述振幅和上述第二发送波的上述反射波所对应的上述振幅,来判定上述障碍物的存在的
处理。
[0284]
根据第七观点,上述判定处理包含:根据基于与从第一上述超声波换能器发送的上述发送波对应的上述反射波的上述障碍物的存在判定结果、以及基于与从第二上述超声波换能器发送的上述发送波对应的上述反射波的上述障碍物的存在判定结果,来判定上述障碍物的存在的处理。
[0285]
根据第八观点,上述第一上述超声波换能器和上述第二上述超声波换能器在上述车高方向上的搭载位置不同。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。