1.本实用新型属于宠物用品技术领域,具体涉及一种自动猫厕所排泄物推平装置和自动猫厕所。
背景技术:
2.自动猫厕所通常包括排泄物筛分装置和暂时存放排泄物的垃圾盒,猫的排泄物经过筛分装置自动筛分出来,然后经过筛分装置的排废口自动滚入垃圾盒中。然而排泄物从排废口掉落进入垃圾盒的位置基本固定的,排泄物在垃圾盒中会像小山一样堆积,在落入点具有最高的高度,由于垃圾在超过一定高度需要打包,而垃圾盒两侧的收容空间基本是空的,因此导致垃圾盒收容利用率很低,也造成了垃圾袋的浪费。
3.因此,有必要对现有技术予以改良以克服现有技术中的所述缺陷。
技术实现要素:
4.因此,本实用新型所要解决的是现有技术中垃圾盒收容利用率低、垃圾袋浪费的技术问题。
5.为解决上述技术问题,本实用新型提供一种自动猫厕所排泄物推平装置,包括:
6.垃圾盒,上方具有敞口;
7.推平组件,包括驱动机构和由所述驱动机构带动的推平件,所述推平件靠近所述垃圾盒的敞口设置,所述推平件的下端与所述敞口齐平或至少部分位于所述敞口内,所述推平件由所述驱动机构带动至少在所述敞口范围内往复运动以推平堆积高于所述推平件下端的排泄物。
8.在其中一实施例中,所述推平件的运动方向与所述敞口的长度方向平行。
9.在其中一实施例中,所述推平件的运动路径的终点超过所述敞口的长度方向的中心位置。
10.在其中一实施例中,所述推平件构造为杆状,所述推平件长度延伸方向平行于所述敞口的宽度方向。
11.在其中一实施例中,所述推平组件还包括用于将所述驱动机构的旋转传化成所述推平件往复运动的传动机构,所述传动机构包括传动螺杆,所述推平件包括与所述传动螺杆螺纹配合的螺纹轴孔,所述传动螺杆被驱动的旋转带动所述推平件在所述传动螺杆上滑动。
12.在其中一实施例中,所述推平组件还包括与所述传动螺杆平行设置的导向杆,所述推平件设置有导向孔,所述导向杆穿设于所述导向孔中,所述推平件被驱动的沿着所述导向杆和所述传动螺杆往复滑动。
13.在其中一实施例中,还包括用于检测所述垃圾盒中的垃圾高度的检测单元和与所述检测单元电连接的控制器,所述控制器接收所述检测单元的检测信号输出控制信号,所述驱动机构响应所述控制信号驱动所述推平件往复运动。
14.在其中一实施例中,所述检测单元包括激光传感器。
15.在其中一实施例中,所述控制器控制所述驱动机构启动的时间长度以控制所述推平件的运行路径。
16.此外,本实用新型还提供一种自动猫厕所,包括上述任一实施例所述的排泄物推平装置。
17.本实用新型提供的技术方案,具有以下优点:
18.本实用新型提供自动猫厕所排泄物推平装置和自动猫厕所,包括:垃圾盒,上方具有敞口;推平组件,包括驱动机构和由驱动机构带动的推平件,推平件靠近垃圾盒的敞口设置,推平件的下端与敞口齐平或至少部分位于敞口内,推平件由驱动机构带动至少在敞口范围内往复运动以推平堆积高于推平件下端的排泄物,能够赶平排泄物堆积高度,提高垃圾盒周边收容空间的利用效率,从而提高垃圾盒的收容效率,降低倒垃圾的频率,提高用户使用体验。
附图说明
19.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
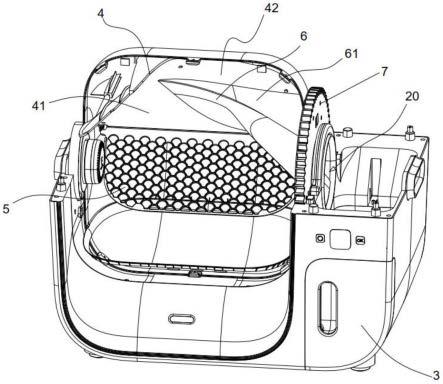
20.图1为本实用新型实施例所提供的自动猫厕所排泄物推平装置结构示意图;
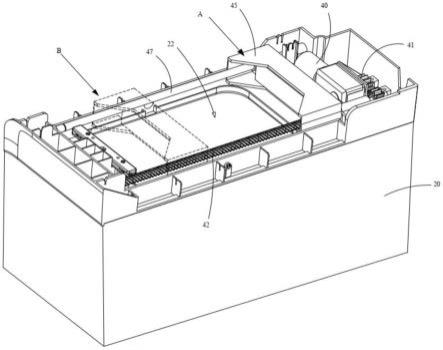
21.图2为本实用新型实施例所提供的自动猫厕所排泄物推平装置另一视角的结构示意图。
具体实施方式
22.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。下文中将参考附图并结合实施例来详细说明本实用新型。需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
23.需要说明的是,本实用新型的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。
24.在本实用新型中,在未作相反说明的情况下,使用的方位词如“上、下、顶、底”通常是针对附图所示的方向而言的,或者是针对部件本身在竖直、垂直或重力方向上而言的;同样地,为便于理解和描述,“内、外”是指相对于各部件本身的轮廓的内、外,但上述方位词并不用于限制本实用新型。
25.本实施例提供了一种自动猫厕所排泄物推平装置,应用于自动猫厕所。请参见图1,该排泄物推平装置包括垃圾盒20和推平组件。
26.其中,垃圾盒20用于收集猫的排泄物,上方具有敞口22。在具体实施场景中,经过筛分出来的排泄物在重力作用下落入敞口22,并堆积在垃圾盒20内。通常,垃圾盒20为长方体或立方体形状,也可能是圆柱体,在此不作限制。
27.受限于垃圾盒20与猫厕所筛分装置的固定位置关系,排泄物落入位置相对固定,
排泄物在垃圾盒20中会像小山一样堆积,在落入点具有最高的高度,这导致了垃圾盒来20周边的收容空间利用率低,进一步造成了倒垃圾频繁,给用户带来麻烦。而且,若垃圾盒上套设一次性垃圾袋来收集垃圾,也会导致垃圾袋浪费。
28.推平组件,用于推平垃圾盒20中的排泄物堆积。具体而言,推平组件包括驱动机构40和由驱动机构40带动的推平件45。推平件45靠近垃圾盒20的敞口22设置,推平件22的下端与敞口22齐平。推平件45由驱动机构41带动至少在敞口22范围内往复运动以推平堆积高于推平件45下端的排泄物,使排泄物更加均匀的收容在垃圾盒20的底部空间。推平件45也可以部分伸入敞口22内,也即推平件45的下端位于敞口22内,如此,在推平件22往复运动时推平位于敞口22内部的排泄物堆积,能够实现更高的推平效果。
29.本实施例提供的排泄物推平装置,在垃圾盒的敞口处设置推平组件,推动组件包括推平件,由驱动机构带动至少在敞口范围内往复运动以推平堆积高于推平件下端的排泄物,能够赶平排泄物堆积高度,提高垃圾盒周边收容空间的利用效率,从而提高垃圾盒的收容效率,降低倒垃圾的频率,提高用户使用体验。
30.在具体实施例中,驱动机构40为驱动马达。
31.上述“推平”理解为相对排泄物堆积而言,将垃圾盒20内排泄物堆积高度降低。并不能局限的理解为将排泄物堆积的顶部推完全平整。上述推平效果是相对垃圾盒的收容空间的有效利用率,利用率越高,则认为推平效果越好。
32.本实施例中,垃圾盒20的敞口22大致为方口,其一侧边的长度大于另一侧边的长度。定义较长的一侧边的延伸方向为敞口22的长度方向,推平件45的运动方向与敞口22的长度方向平行。具体的,推平件45构造为杆状,推平件45长度延伸方向平行于敞口22的宽度方向。如此,推平件45在敞口22范围内运动时,其下端面的运动路径覆盖经过的敞口22的面积,从而能够将敞口22范围内高于推平件45的排泄物堆积推平。
33.为了进一步保障推平效果,推平件45的运动路径的终点超过敞口22的长度方向的中心位置。也即,推平件45的运动路径覆盖至少一半的敞口22的面积。优选的,推动件45运动路径的长度占敞口22的长度的比例范围是1/2到3/4之间。
34.具体而言,推平组件还包括用于将驱动机构40的旋转传化成推平件45往复运动的传动机构(41,42),传动机构包括传动螺杆41,推平件45包括与传动螺杆42螺纹配合的螺纹轴孔,传动螺杆42被驱动的旋转带动推平件45在传动螺杆42上滑动。在具体实施例中,推平件45包括安装孔和固定设置在安装孔内的轴套,轴套的内表面设置螺纹,形成上述螺纹轴孔。
35.为了提高推平件运动的稳定性,推平组件还包括与传动螺杆42平行设置的导向杆47,推平件45设置有导向孔(未示出),导向杆47穿设于导向孔中,推平件47被驱动的沿着导向杆47和传动螺杆42往复滑动。
36.具体而言,导向杆47和传动螺杆42分别设置于敞口22的两侧边位置,位于垃圾盒20的上方。导向杆47的两端固定,为光滑的圆柱杆。传动螺杆42的外表面具有螺纹,传动机构还包括减速齿轮组件41,减速齿轮组件41与传动螺杆42的外螺纹啮合,减速齿轮组件41由驱动机构40带动旋转,从而带动传动螺杆42绕着自身轴线转动。
37.在一些实施例中,请参见图2,排泄物推平装置还包括用于检测垃圾盒20中的垃圾高度的检测单元30和与检测单元电连接的控制器(未示出),控制器接收检测单元30的检测
信号进而输出控制信号,其中控制信号用于控制驱动机构40的启动,驱动机构40响应控制信号驱动推平件45往复运动。
38.具体的,上述检测单元30可以包括激光传感器。激光传感器包括一发射端和一接收端,发射端设置于敞口22的一侧,接收端设置于敞口22的另一侧,发射端和接收端的高度相同,当排泄物堆积高度阻挡了发射端发出的信号,导致接收端接收不到,此时检测单元30的检测信号表示排泄物已超过预设高度,需要进行推平。控制器根据该检测信号控制驱动机构40启动,推平件45启动推平动作。
39.在其他实施例中,激光传感器还可以为激光测距传感器。具体而言,激光测距传感器的收发端均设置在敞口的同一侧,通过发出激光信号和接收到激光信号的时间差计算当前位置与对面障碍物位置的距离。当排泄物堆积高度超过预设高度,排泄物堆积在激光测距传感器的测距范围内,测得的距离小于预设阈值,此时检测单元30的检测信号表示排泄物已超过预设高度,需要进行推平。控制器根据该检测信号控制驱动机构40启动,推平件45启动推平动作。
40.在一些实施例中,控制器控制驱动机构40启动的时间长度来控制推平件45的运行路径。具体而言,推平件45的运动起点位于敞口的一侧,设每次推平动作驱动机构的启动时长为t,每一次启动驱动机构40均使驱动机构运行t时间,在t/2时间,推平件45由初始位置a移动到预设终点位置b,然后在终点位置驱动机构40反向旋转,带动推平件45回到初始位置,如此,完成一次推平动作。
41.在一些实施例中,推平组件的启动条件还可以是由用户控制的,比如由用户通过手持终端来启动推动组件。推平组件也可以根据自动猫厕所筛分装置运转的次数来控制是否启动推动组件。
42.本实施例还提供一种自动猫厕所,包括上述任一实施例所提供的排泄物推平装置。本实施例所提供的自动猫厕所,能够在排泄物堆积高时推平排泄物,提高垃圾盒的利用效率,降低导垃圾的频率,提升用户体验。
43.显然,上述所描述的实施例仅仅是本实用新型一部分的实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下,可以做出其它不同形式的变化或变动,都应当属于本实用新型保护的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。