技术特征:
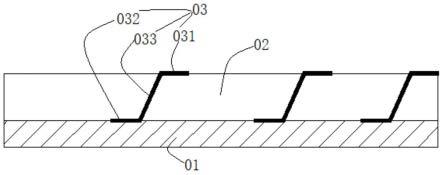
1.一种轨道感应系统,其特征在于,其包括轨道基架及容纳于所述轨道基架内的弹片,所述轨道基架上形成有槽道,所述弹片容纳于所述槽道内;所述弹片形成运载轨道,物料于所述运载轨道上移动,当所述物料被放置于所述运载轨道上时,与所述物料位置对应的弹片被压缩。2.根据权利要求1所述的一种轨道感应系统,其特征在于,所述槽道为条形槽道,所述弹片具有弹性臂、连接臂,以及连接所述弹性臂和连接臂的过渡臂,所述连接臂与所述槽道的底部连接固定,所述过渡臂支撑所述弹性臂悬空,所述弹片的所述弹性臂上形成所述运载轨道,当所述物料被放置于所述运载轨道上时,与所述物料位置对应的弹片的弹性臂被向下压缩。3.根据权利要求2所述的一种轨道感应系统,其特征在于,其还包括传感器探头,所述传感器探头与所述弹性臂相对设置,且所述传感器探头装设于所述弹性臂的下方,当所述弹性臂被向下压缩,所述传感器探头与所述弹性臂的下表面距离缩短,所述传感器探头监测所述弹性臂的实际位移量。4.根据权利要求3所述的一种轨道感应系统,其特征在于,其还包括与所述传感器探头连接的数字化位移装置,所述数字化位移装置将所述实际位移量与标准位移量进行对比,并根据对比结果输出开关量信号,以控制物料植入机构的动作;其还包括上位机,所述上位机与所述数字化位移装置相连,所述数字化位移装置将所述实际位移量转化为实际位移数值,所述实际位移值被所述上位机处理为位移曲线图显示在显示界面上。5.根据权利要求4所述的一种轨道感应系统,其特征在于,所述物料植入机构包括植入真空吸嘴,所述物料包括元器件,所述运载轨道上还设置有载带,所述载带上设置有若干个收纳槽,所述植入真空吸嘴被驱动的将吸附的所述元器件植入所述载带的所述收纳槽内,所述载带承载着所述元器件被驱动的自所述运载轨道上移动至后道工位;位于所述植入真空吸嘴下的所述弹片的所述弹性臂下设置有所述传感器探头,当所述植入真空吸嘴下移以将吸附的元器件植入所述载带上的收纳槽内时,所述收纳槽下的弹片的所述弹性臂被向下压缩,所述传感器探头监测所述弹性臂的实际位移量,所述数字化位移装置将所述实际位移量转化为实际位移数值后通过上位机显示为位移曲线图。6.根据权利要求5所述的一种轨道感应系统,其特征在于,所述数字化位移装置被配置的获得传感器对应的上限范围和/或下限范围,采集所述传感器监测得到的实时位移量,并基于采集的所述实时位移量与对应的上限范围和/或下限范围确定所述元器件是否被植入到位,所述上位机将所述数字化位移装置采集的所述实时位移量处理为表征所述元器件的实时植入状态的位移曲线图,且根据所述数字化位移装置确定所述元器件是否植入到位,并分析设备的运行状态。7.根据权利要求5所述的一种轨道感应系统,其特征在于,其还包括一个或多个执行机构、被配置的对所述一个或多个执行机构发出动作控制信号的控制装置,以及被配置的分别监测对应的一个或多个执行机构的动作,且根据所述执行机构的动作向单片机发出动作感应信号的一个或多个监测器件;所述上位机被配置的接收所述单片机处理得到的时序动作信号,且将所述时序动作信
号输出为实时动作时序波形图;所述执行机构接收所述动作控制信号后,根据所述动作控制信号做出动作,所述监测器件监测所述执行机构的实时动作情况,且在所述执行机构做出动作时发出动作感应信号,所述单片机将所述动作感应信号处理为所述执行机构的时序动作信号,所述上位机将所述实时动作时序波形图与标准动作时序波形图进行对比,以获得所述实时动作时序波形图相对所述标准动作时序波形图的异常动作情况,并分析异常动作原因。8.根据权利要求7所述的一种轨道感应系统,其特征在于,所述执行机构包括元器件处理装置的转盘,所述转盘包括设置于边缘上的多个凹槽,所述转盘在工作时被驱动的转动,以使得所述转盘上的凹槽逐一被转动至元器件处理装置的植入真空吸嘴的下方;所述转盘被驱动的转动时,所述监测器件根据所述转盘的动作向所述单片机发出动作感应信号,所述单片机将所述动作感应信号处理为时序动作信号,所述上位机将所述时序动作信号处理为所述转盘的实时动作时序波形图;所述上位机的系统内存储有所述转盘的标准动作时序波形图,所述上位机将所述转盘的实时动作时序波形图与所述转盘的标准动作时序波形图进行对比,以获得所述转盘的实时动作时序波形图相对所述转盘的标准动作时序波形图的异常动作情况,若所述转盘的实时动作异常,则所述上位机分析所述转盘的异常动作原因。9.根据权利要求8所述的一种轨道感应系统,其特征在于,所述执行机构还包括所述植入真空吸嘴;当所述转盘被驱动的转动时,所述转盘上的一个所述凹槽被转动至所述植入真空吸嘴下方,所述转盘停转,所述植入真空吸嘴被驱动的向所述凹槽移动,所述植入真空吸嘴将吸附的元器件植入所述凹槽内后,所述植入真空吸嘴复位;当所述转盘被驱动的转动时,所述载带同时被驱动的移动,以使得每个所述凹槽与一个空置的所述收纳槽相连通,当所述植入真空吸嘴下移时,所述植入真空吸嘴吸附的元器件自所述凹槽被植入所述收纳槽中,所述收纳槽下的弹片的弹性臂被向下压缩,所述传感器探头实时监测所述弹性臂的位移量;所述转盘被驱动的转动时,所述监测器件根据所述转盘的动作向所述单片机发出动作感应信号;所述转盘被驱动的转动到位后,所述植入真空吸嘴在所述控制装置的动作控制信号的控制下开始动作,所述监测器件监测所述植入真空吸嘴的实时动作情况,且在所述植入真空吸嘴做出动作时发出动作感应信号;所述植入真空吸嘴完成元器件的植入动作后,所述控制装置控制所述植入真空吸嘴复位,当所述植入真空吸嘴复位后,所述转盘被驱动的再次转动,以使得所述转盘上的下一个凹槽被转动至已复位的所述植入真空吸嘴的下方。10.根据权利要求9所述的一种轨道感应系统,其特征在于,当所述植入真空吸嘴将所述元器件植入所述收纳槽中时,所述单片机根据监测所述弹片的弹性臂的位移量的传感器探头获得动作感应信号,所述控制装置控制用以驱动载带运动的载带驱动部移动所述载带,以使得所述载带上的待植入元器件的收纳槽被移动至所述植入真空吸嘴的下方,且已被植入元器件的收纳槽被移动至后道包装工位;所述监测器件监测得到的所述转盘的动作感应信号和所述植入真空吸嘴的动作感应信号被所述单片机同步采集后按时序整理为时序动作信号,所述单片机将所述时序动作信
号发送至上位机,所述上位机分析得到表征所述转盘和所述植入真空吸嘴的实时动作时序波形图;所述上位机内存储有所述转盘和所述植入真空吸嘴的标准动作时序波形图,所述上位机将所述实时动作时序波形图与所述标准动作时序波形图进行对比,以获得所述实时动作时序波形图相对所述标准动作时序波形图的异常动作情况,并分析异常动作原因。11.一种自动化设备,其特征在于,其包括上述权利要求1-10任一所述的一种轨道感应系统;其还包括物料上料装置、元器件上料装置、元器件处理装置和物料封装装置,所述物料上料装置用于对包装元器件的载带进行上料,所述元器件上料装置用于实现对元器件的上料,所述元器件处理装置用于将所述元器件植入至所述载带的收纳槽中,所述物料封装装置用于实现对收纳有元器件的载带进行包装。12.根据权利要求11所述的一种自动化设备,其特征在于,所述元器件处理装置包括:机台;设置于机台上的转盘,其中所述转盘在工作时被驱动的转动,所述转盘包括设置于边缘上的多个凹槽;入料部,其包括设置于机台上的一个或多个入料真空吸嘴;排料部,其包括设置于机台上的一个或多个排料真空吸嘴,在所述转盘转动时位于所述转盘边缘的多个凹槽依次先后经过所述入料真空吸嘴和所述排料真空吸嘴;检测装置;植入部,其包括属于所述一个或多个植入真空吸嘴;载带驱动部,其驱动载带经过所述植入部,所述载带上包括排成列的多个收纳槽;和其中所述植入真空吸嘴通过管道与真空泵相连通,所述入料真空吸嘴通过管道与所述真空泵连通,所述排料真空吸嘴通过管道受控可选的与所述真空泵和出气泵中的一个连通,所述入料真空吸嘴通过真空吸力将元器件吸入位于所述入料真空吸嘴处的凹槽内,位于所述转盘的凹槽内的元器件会被所述检测装置检测,所述排料真空吸嘴通过真空吸力将检测正常的元器件吸附在位于所述排料真空吸嘴处的凹槽内,所述排料真空吸嘴通过吹气推力将检测异常的元器件从位于所述排料真空吸嘴处的凹槽内吹出,所述植入真空吸嘴将通过真空吸力将位于所述植入真空吸嘴处的凹槽内的元器件吸住并植入载带的收纳槽中;所述入料部还包括设置于机台上的入料轨道、分离针和入位检测器,所述分离针受控的在阻挡位置和敞开位置之间移动,在所述分离针处于阻挡位置时阻挡所述入料轨道上的元器件,在所述分离针处于敞开位置时所述入料真空吸嘴通过真空吸力将所述入料轨道上的元器件吸入位于所述入料真空吸嘴处的凹槽内,所述入位检测器被配置的检测所述元器件是否进入位于所述入料真空吸嘴处的凹槽内;所述植入部还包括植入驱动部,所述植入驱动部驱动所述植入真空吸嘴在取料位置和植入位置之间往复运动,所述植入真空吸嘴在所述取料位置时从将位于所述植入真空吸嘴处的凹槽内的元器件吸住,在植入位置时将吸住的元器件植入所述载带的收纳槽中。
技术总结
本发明公开了一种轨道感应系统及自动化设备,轨道感应系统包括轨道基架及容纳于轨道基架内的弹片,轨道基架上形成有槽道,弹片容纳于槽道内;所述弹片形成运载轨道,物料于运载轨道上移动,当物料被放置于运载轨道上时,与物料位置对应的弹片被压缩;弹片具有弹性臂、连接臂,以及连接弹性臂和连接臂的过渡臂,所述弹片的弹性臂上形成运载轨道,当物料被放置于运载轨道上时,与物料位置对应的弹片的弹性臂被向下压缩。当使用本发明的感应轨道系统进行物料运输时,可直接通过弹片的压缩量来判断物料植入状态,明确物料植入状态后,在物料运输途中可以避免因植入不到位引起的物料不良及设备故障。良及设备故障。良及设备故障。
技术研发人员:黄德根
受保护的技术使用者:苏州优斯登物联网科技有限公司
技术研发日:2021.05.13
技术公布日:2022/11/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。