1.本发明涉及道路工程领域,具体涉及一种基于无人机的道路施工路面离析实时监测方法及系统。
背景技术:
2.道路施工的智能化、精细化是未来施工发展的方向,提高施工速度和质量,降低施工成本。现阶段的道路施工大多还停留在粗放管理的阶段,而对施工路面离析快速检测的研究少之又少,仅仅在施工验收过程中对路面进行构造深度检测,而检测方法多为抽样检测和定点检测,存在诸多缺点。不仅检测效率低下,检测结果受人为因素影响较大,而且只是结果导向的验收,无法做到过程导向的控制,施工过程中不能及时获得路面纹理和离析水平的结果,从而无法采取措施继续提高路面质量。
3.因此,有必要开发一种能够在施工过程中实现路面离析实时、快速检测的系统和方法,及时发现摊铺碾压过程中的问题,采取措施提高路面施工的质量,实现道路施工的智能化和精细化。
技术实现要素:
4.本发明目的:在于提供一种基于无人机的道路施工路面离析实时监测方法及系统,能够实现路面离析水平的实时快速检测,提高路面的施工质量。
5.为实现以上功能,本发明设计一种基于无人机的道路施工路面离析实时监测方法,基于无人机,针对目标道路施工现场,执行以下步骤s1-步骤s5,完成对路面施工情况的监测:
6.步骤1:针对目标道路施工现场,采用无人机,以图像采集飞行方案实时采集目标道路的路面图像;
7.步骤2:基于步骤1中无人机所采集的各路面图像,将各路面图像拼接为目标道路的全景俯瞰图,根据具体施工方案,将全景俯瞰图划分为预设数量的区域,分别对各区域的路面图像进行去噪、图像增强、图像分割预处理,基于各区域的路面图像中路面纹理像素点的分布,计算各区域的面积离异系数;若离析水平大于预设阈值,则判定该区域离析严重,否则判定为未发生离析;
8.步骤3:基于步骤2所获得的各区域的判定结果,针对离析严重的区域,无人机以三维模型数据采集飞行方案,采集离析严重的区域预设角度的路面图像;
9.步骤4:基于步骤3所获得的路面图像,采用立体视觉三维建模方法,建立路面纹理三维模型,并基于路面纹理三维模型,计算区域平均构造深度;
10.步骤5:根据步骤4所获得的区域平均构造深度,通过与未发生离析区域的区域平均构造深度进行对比,判断区域离析水平,采取相应的预设措施,使面积离异系数降低至预设阈值以下,完成对路面施工情况的监测。
11.作为本发明的一种优选技术方案:步骤1中无人机的图像采集飞行方案为:无人机
飞行高度为12米以上、15米以下,无人机飞行速度5m/s以上,10m/s以下,图像拍摄的航向重叠度50%以上。
12.作为本发明的一种优选技术方案:步骤2中将全景俯瞰图划分为预设数量的区域的具体方法如下:
13.根据具体施工方案,以及摊铺碾压方向,将全景俯瞰图以预设间隔逐次划分区域,所述预设间隔为10米以上,20米以下;其中机械的纵向接缝处、以及施工拼接处单独划分区域。
14.作为本发明的一种优选技术方案:步骤2中各区域的面积离异系数的计算方法如下:
15.经预处理后各区域的路面图像中,路面纹理凸出部分为白色像素点,路面纹理凹陷部分为白色像素点,面积离异系数的计算如下式:
[0016][0017][0018][0019]
式中,ei为第i个区域的面积百分率;wi为第i个区域内白色像素点个数;si为第i个区域内像素点的总数;vs为面积离异系数;σ为面积百分率标准差;为面积百分率平均值。
[0020]
作为本发明的一种优选技术方案:步骤3中无人机以三维模型数据采集飞行方案,采集离析严重的区域预设角度的路面图像的具体方法如下:
[0021]
无人机以预设角度中的至少五个角度针对离析严重的区域进行图像拍摄,预设角度包括正摄、倾斜角45
°
、倾斜角45
°
到60
°
之间任意角度。
[0022]
作为本发明的一种优选技术方案:步骤4中基于路面纹理三维模型,计算区域平均构造深度的具体方法如下:
[0023]
步骤4.1:针对路面纹理三维模型,对其进行三维模型裁剪、畸变点去除、表修补处理;
[0024]
步骤4.2:对路面纹理三维模型坐标配准后,转换为点云数据坐标,从而获得区域中每个点的深度信息,计算区域平均构造深度如下式:
[0025][0026]
式中mtd为区域平均构造深度,v为发生离析的路表面与水平面之间的体积,a为区域面积。
[0027]
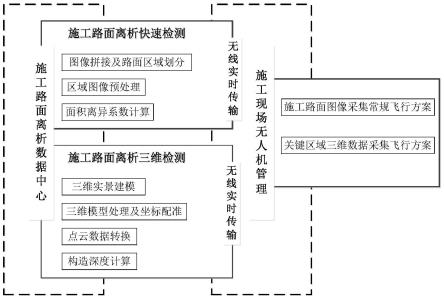
本发明还设计一种基于无人机的道路施工路面离析实时监测系统,该系统包括施工路面数据中心、施工现场无人机管理模块,施工路面数据中心包括施工路面离析检测系统、施工路面离析三维检测子系统,使得所述基于无人机的道路施工路面离析实时监测系统实现所述的一种基于无人机的道路施工路面离析实时监测方法;
[0028]
所述施工路面数据中心,用于与目标道路施工现场联络,实时接收并处理无人机数据,无人机数据包括目标道路的路面图像和路面纹理三维模型,并将结果对目标道路施工现场进行反馈,供目标道路施工现场对无人机飞行方案的动态制定,以及对其包括的施工路面离析检测子系统和施工路面离析三维检测子系统进行控制;
[0029]
所述施工现场无人机管理模块,用于管理目标道路施工现场无人机的飞行,根据摊铺碾压的施工方案以及无人机数据处理的结果动态制定无人机飞行方案和图像采集区域;
[0030]
所述施工路面离析检测子系统,用于获取无人机所采集的各路面图像,将各路面图像拼接为目标道路的全景俯瞰图,将全景俯瞰图按照具体施工方案划分区域,计算各区域的面积离异系数,判断各区域的离析水平;
[0031]
施工路面离析三维检测子系统,用于对离析严重的区域的路面纹理三维建模,并计算区域平均构造深度。
[0032]
作为本发明的一种优选技术方案:施工路面离析检测子系统包括以下模块:
[0033]
图像传输模块,用于接收无人机采集的路面图像;
[0034]
图像拼接及路面区域划分模块,用于将无人机采集的各路面图像拼接为目标道路的全景俯瞰图,并依据具体施工方案,划分路面区域;
[0035]
区域图像预处理模块,用于对每个区域的图像进行去噪,图像增强,图像分割处理;
[0036]
面积离异系数计算模块,用于计算各区域的面积离异系数,并将结果传输给目标道路施工现场,以供采取相应的预设措施。
[0037]
作为本发明的一种优选技术方案:施工路面离析三维检测子系统包括以下模块:
[0038]
图像传输模块,用于接收无人机采集的路面图像;
[0039]
三维模型建模模块,用于建立路面纹理三维模型;
[0040]
三维模型处理模块,用于对三维模型裁剪,畸变点去除,表修补处理;
[0041]
三维模型点云数据转换模块,用于对三维模型坐标配准,以及点云数据坐标转换处理;
[0042]
构造深度计算模块,用于计算区域平均构造深度,并与未发生离析区域的区域平均构造深度进行对比,判断区域离析水平。
[0043]
有益效果:相对于现有技术,本发明的优点包括:
[0044]
1.本发明使施工过程中能够实时获得路面的离析水平;通过无人机的高机动性,实现了路面施工数据的快速采集;同时,利用图像处理和三维实景重建技术,实时、快速地监测离析水平,解决了传统人工离析监测,诸如目视、摊铺法、钻芯法等检测速度较慢,受人为因素影响大,无法实现施工过程地控制等问题,极大地提高了离析检测地效率,有利于实现道路施工的智能化,数字化。
[0045]
2.本发明提出了一种利用图像的离析快速判定的指标,面积离异系数,有效地解决了传统离析检测困难,速度低下的问题,对施工过程控制具有指导意义。
[0046]
3.本发明建立施工路面离析数据存储模块,实现对施工路面的全域连续性管理,解决了传统施工路面离析监测数据的缺失问题,有效提高了道路施工的数字化的水平。
附图说明
[0047]
图1是根据本发明实施例提供的基于无人机的道路施工路面离析实时监测方法及系统的示意图;
[0048]
图2是根据本发明实施例提供的基于无人机的道路施工路面离析实时监测方法的检测流程示意图。
具体实施方式
[0049]
下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
[0050]
参照图1、图2,本发明实施例提供的一种基于无人机的道路施工路面离析实时监测方法,基于无人机,针对目标道路施工现场,执行以下步骤s1-步骤s5,完成对路面施工情况的监测:
[0051]
步骤1:针对目标道路施工现场,采用无人机,以图像采集飞行方案实时采集目标道路的路面图像;
[0052]
所述无人机的图像采集飞行方案为:无人机飞行高度为12米以上、15米以下,无人机飞行速度5m/s以上,10m/s以下,图像拍摄的航向重叠度50%以上。
[0053]
步骤2:基于步骤1中无人机所采集的各路面图像,将各路面图像拼接为目标道路的全景俯瞰图,根据具体施工方案,将全景俯瞰图划分为预设数量的区域,分别对各区域的路面图像进行去噪、图像增强、图像分割预处理,基于各区域的路面图像中路面纹理像素点的分布,计算各区域的面积离异系数;若离析水平大于预设阈值,则判定该区域离析严重,否则判定为未发生离析;
[0054]
将全景俯瞰图划分为预设数量的区域的具体方法如下:
[0055]
根据具体施工方案,以及摊铺碾压方向,将全景俯瞰图以预设间隔逐次划分区域,所述预设间隔为10米以上,20米以下;其中机械的纵向接缝处、以及施工拼接处单独划分区域。
[0056]
步骤2中各区域的面积离异系数的计算方法如下:
[0057]
经预处理后各区域的路面图像中,路面纹理凸出部分为白色像素点,路面纹理凹陷部分为白色像素点,面积离异系数的计算如下式:
[0058][0059][0060][0061]
式中,ei为第i个区域的面积百分率;wi为第i个区域内白色像素点个数;si为第i个区域内像素点的总数;vs为面积离异系数;σ为面积百分率标准差;为面积百分率平均值。
[0062]
步骤3:基于步骤2所获得的各区域的判定结果,针对离析严重的区域,无人机以三维模型数据采集飞行方案,采集离析严重的区域预设角度的路面图像;
[0063]
无人机以三维模型数据采集飞行方案,采集离析严重的区域预设角度的路面图像的具体方法如下:
[0064]
无人机以预设角度中的至少五个角度针对离析严重的区域进行图像拍摄,预设角度包括正摄、倾斜角45
°
、倾斜角45
°
到60
°
之间任意角度。
[0065]
步骤4:基于步骤3所获得的路面图像,采用立体视觉三维建模方法,建立路面纹理三维模型,并基于路面纹理三维模型,计算区域平均构造深度;
[0066]
基于路面纹理三维模型,计算区域平均构造深度的具体方法如下:
[0067]
步骤4.1:针对路面纹理三维模型,对其进行三维模型裁剪、畸变点去除、表修补处理;
[0068]
步骤4.2:对路面纹理三维模型坐标配准后,转换为点云数据坐标,从而获得区域中每个点的深度信息,计算区域平均构造深度如下式:
[0069][0070]
式中mtd为区域平均构造深度,v为发生离析的路表面与水平面之间的体积,a为区域面积。
[0071]
步骤5:根据步骤4所获得的区域平均构造深度,通过与未发生离析区域的区域平均构造深度进行对比,判断区域离析水平,采取相应的预设措施,使面积离异系数降低至预设阈值以下,完成对路面施工情况的监测。
[0072]
本发明实施例还提供一种基于无人机的道路施工路面离析实时监测系统,参照图1,该系统包括施工路面数据中心、施工现场无人机管理模块,施工路面数据中心包括施工路面离析检测系统、施工路面离析三维检测子系统,使得所述基于无人机的道路施工路面离析实时监测系统实现所述的一种基于无人机的道路施工路面离析实时监测方法;
[0073]
所述施工路面数据中心,用于与目标道路施工现场联络,实时接收并处理无人机数据,无人机数据包括目标道路的路面图像和路面纹理三维模型,并将结果对目标道路施工现场进行反馈,供目标道路施工现场对无人机飞行方案的动态制定,以及对其包括的施工路面离析检测子系统和施工路面离析三维检测子系统进行控制;
[0074]
所述施工现场无人机管理模块,用于管理目标道路施工现场无人机的飞行,根据摊铺碾压的施工方案以及无人机数据处理的结果动态制定无人机飞行方案和图像采集区域;
[0075]
所述施工路面离析检测子系统,用于获取无人机所采集的各路面图像,将各路面图像拼接为目标道路的全景俯瞰图,将全景俯瞰图按照具体施工方案划分区域,计算各区域的面积离异系数,判断各区域的离析水平;
[0076]
施工路面离析检测子系统包括以下模块:
[0077]
图像传输模块,用于接收无人机采集的路面图像;
[0078]
图像拼接及路面区域划分模块,用于将无人机采集的各路面图像拼接为目标道路的全景俯瞰图,并依据具体施工方案,划分路面区域;
[0079]
区域图像预处理模块,用于对每个区域的图像进行去噪,图像增强,图像分割处理;
[0080]
面积离异系数计算模块,用于计算各区域的面积离异系数,并将结果传输给目标
道路施工现场,以供采取相应的预设措施。
[0081]
施工路面离析三维检测子系统,用于对离析严重的区域的路面纹理三维建模,并计算区域平均构造深度。
[0082]
施工路面离析三维检测子系统包括以下模块:
[0083]
图像传输模块,用于接收无人机采集的路面图像;
[0084]
三维模型建模模块,用于建立路面纹理三维模型;
[0085]
三维模型处理模块,用于对三维模型裁剪,畸变点去除,表修补处理;
[0086]
三维模型点云数据转换模块,用于对三维模型坐标配准,以及点云数据坐标转换处理;
[0087]
构造深度计算模块,用于计算区域平均构造深度,并与未发生离析区域的区域平均构造深度进行对比,判断区域离析水平。
[0088]
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。