1.本实用新型涉及物料留样的技术领域,具体涉及一种液体或颗粒物料自动留样装置。
背景技术:
2.现有人工取样留样需要每次水泥出厂时都进行人工取样和留样,全天不分时段需要随时派人员前往取样点,取样点通常距离远且分散,而且环境比较恶劣。人员在每次水泥出厂过程中只进行一次取样。这使得现有人工留样代表性差,效率低,人员负担大,人力成本高,人工瞬时取样取样代表性差,人工取样效率低。
技术实现要素:
3.本实用新型的目的在于提供一种液体或颗粒物料自动留样装置,以解决现有技术中导致的上述缺陷。
4.一种液体或颗粒物料自动留样装置,包括安装柜、减速器、驱动电机、旋转轴、留样桶、电缸、封桶盖、留样管及电控箱,所述安装柜的下侧均匀安装有支撑脚,所述减速器及驱动电机均固定于安装柜的内侧顶部且驱动电机位于减速器的左侧,所述驱动电机的输出轴连接于减速器的输入端,所述旋转轴竖直连接于减速器的输出端,所述旋转轴的下端部同轴连接有圆形的放置板,所述放置板的上侧垂直固定有“人”字型的分隔板,所述分隔板的上侧水平连接有“人”字型的定位板,所述留样桶设有三个并间隔放置于放置板的上侧,所述电缸竖直安装于安装柜的内侧顶部且电缸位于减速器的右侧,所述电缸的伸缩杆末端螺纹连接有连接管一,所述连接管一的下侧同轴固定有“人”字型的连接架一,所述封桶盖螺栓连接于连接架一的下方,所述留样管偏置连接于封桶盖的上侧,所述电控箱固定于安装柜的上侧,所述电控箱内设有主控制器,所述主控制器分别与驱动电机及电缸之间电性连接。
5.优选的,还包括金属传感器及金属标记物,所述金属传感器设有一对并通过一个安装片一水平朝内连接于安装柜的内侧底部,所述金属标记物设有三对并呈圆形阵列分布,每一对金属标记物通过一个安装片二水平朝外连接于放置板的上侧,所述金属传感器与金属标记物之间等高设置,所述主控制器与金属传感器之间电性连接。
6.优选的,所述封桶盖的底部居中连接有竖直朝下的距离传感器,所述主控制器与距离传感器之间电性连接。
7.优选的,所述旋转轴在留样桶的上方螺钉连接有连接管二,所述连接管二的下端部同轴连接有“人”字型的连接架二,所述连接架二的各个悬伸端靠上侧均连接有清扫刷。
8.与现有技术相比,本实用新型中的液体或颗粒物料自动留样装置具有以下优点:
9.1、自动留样。通过驱动电机经减速器带动旋转轴发生转动,进而带动放置板上的留样桶进行同步转动,直至某个留样桶转动到封桶盖的正下方。通过电缸的伸缩杆伸长并带动连接架一及封桶盖下降,直至封桶盖盖合到留样桶的上端口。通过留样管将液体或颗
粒物料导入到留样桶内,当留样桶内的物料到达距离传感器测算的预定高度后,即刻停止导入。
10.2、自动更换留样桶。在完成对某个留样桶的填料后。通过电缸的伸缩杆伸缩并带动连接架一及封桶盖上升,直至恢复到初始高度。通过驱动电机经减速器带动旋转轴发生转动,进而带动放置板上的留样桶进行同步转动,直至下一个留样桶转动到封桶盖的正下方。
11.3、自动清理传感器。通过转动的连接架二带动其上的清扫刷进行移动,当清扫刷滑过距离传感器的外表面时,自动清理附着在距离传感器外表面的物料。
附图说明
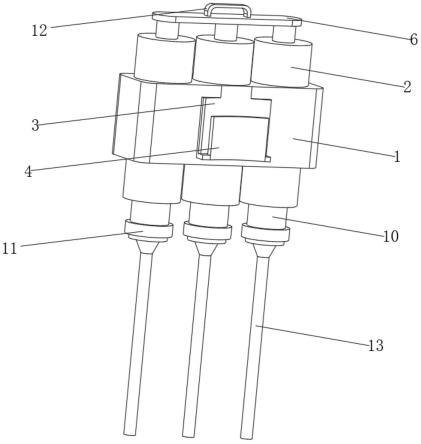
12.图1为本实用新型整体三维的结构示意图。
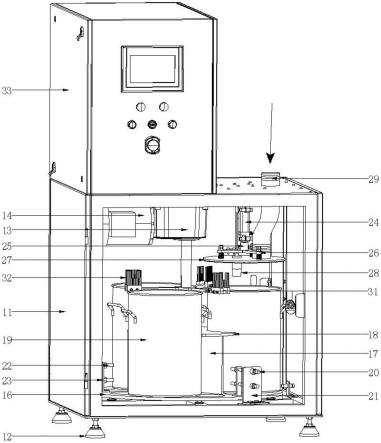
13.图2为本实用新型整体正视的结构示意图。
14.其中:
15.11-安装柜;12-支撑脚;13-减速器;14-驱动电机;15-旋转轴;16-放置板;17-分隔板;18-定位板;19-留样桶;20-金属传感器;21-安装片一;22-金属标记物;23-安装片二;24-电缸;25-连接管一;26-连接架一;27-封桶盖;28-距离传感器;29-留样管;30-连接管二;31-连接架二;32-清扫刷;33-电控箱。
具体实施方式
16.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
17.如图1至图2所示,一种液体或颗粒物料自动留样装置,包括安装柜11、减速器13、驱动电机14、旋转轴15、留样桶19、电缸24、封桶盖27、留样管29及电控箱33,所述安装柜11的下侧均匀安装有支撑脚12,所述减速器13及驱动电机14均固定于安装柜11的内侧顶部且驱动电机14位于减速器13的左侧,所述驱动电机14的输出轴连接于减速器13的输入端,所述旋转轴15竖直连接于减速器13的输出端,所述旋转轴15的下端部同轴连接有圆形的放置板16,所述放置板16的上侧垂直固定有“人”字型的分隔板17,所述分隔板17的上侧水平连接有“人”字型的定位板18,所述留样桶19设有三个并间隔放置于放置板16的上侧,所述电缸24竖直安装于安装柜11的内侧顶部且电缸24位于减速器13的右侧,所述电缸24的伸缩杆末端螺纹连接有连接管一25,所述连接管一25的下侧同轴固定有“人”字型的连接架一26,所述封桶盖27螺栓连接于连接架一26的下方,所述留样管29偏置连接于封桶盖27的上侧,所述电控箱33固定于安装柜11的上侧,所述电控箱33内设有主控制器,所述主控制器分别与驱动电机14及电缸24之间电性连接。
18.在本实施例中,还包括金属传感器20及金属标记物22,所述金属传感器20设有一对并通过一个安装片一21水平朝内连接于安装柜11的内侧底部,所述金属标记物22设有三对并呈圆形阵列分布,每一对金属标记物22通过一个安装片二23水平朝外连接于放置板16的上侧,所述金属传感器20与金属标记物22之间等高设置,所述主控制器与金属传感器20之间电性连接。通过加装一对金属传感器20及三对金属标记物22以实现对三个留样桶19的位置确定。
19.在本实施例中,所述封桶盖27的底部居中连接有竖直朝下的距离传感器28,所述主控制器与距离传感器28之间电性连接。通过加装距离传感器28以自动测定流入留样桶19中的物料高度。
20.在本实施例中,所述旋转轴15在留样桶19的上方螺钉连接有连接管二30,所述连接管二30的下端部同轴连接有“人”字型的连接架二31,所述连接架二31的各个悬伸端靠上侧均连接有清扫刷32。通过加装清扫刷32以自动清理附着在距离传感器28外表面的物料。
21.这种液体或颗粒物料自动留样装置的工作过程如下:
22.步骤1:通过驱动电机14经减速器13带动旋转轴15发生转动,进而带动放置板16上的留样桶19进行同步转动,直至某个留样桶19转动到封桶盖27的正下方;
23.步骤2:通过电缸24的伸缩杆伸长并带动连接架一26及封桶盖27下降,直至封桶盖27盖合到留样桶19的上端口;
24.步骤3:通过留样管29将液体或颗粒物料导入到留样桶19内,当留样桶19内的物料到达距离传感器28测算的预定高度后,即刻停止导入;
25.步骤4:通过电缸24的伸缩杆伸缩并带动连接架一26及封桶盖27上升,直至恢复到初始高度;
26.步骤5:通过驱动电机14经减速器13带动旋转轴15发生转动,进而带动放置板16上的留样桶19进行同步转动,直至下一个留样桶19转动到封桶盖27的正下方;
27.步骤6:在执行步骤5的过程中,通过转动的连接架二31带动其上的清扫刷32进行移动,当清扫刷32滑过距离传感器28的外表面时,自动清理附着在距离传感器28外表面的物料。
28.因此,上述公开的实施方案,就各方面而言,都只是举例说明,并不是仅有的。所有在本实用新型范围内或在等同于本实用新型的范围内的改变均被本实用新型包含。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。