尤其用于拔牙根的设备的控制方法及设备
1.本发明涉及分别根据权利要求1和权利要求9的前序部分的尤其用于拔牙根的设备的控制方法及这种设备。
2.根据印刷出版物ep-a-1 578 296的用于拔除牙根的已知设备,提供了一种张紧设备,该张紧设备可以被部分地引入到口腔中并支撑在口腔中,以便产生拔根所需的拉拔力,该张紧设备包括可调节的拉拔元件,该可调节的拉拔元件可以与可以被固定于牙根中的销连接。为此目的,该张紧设备包括纵向延伸基体和与此相对纵向可调节的张紧支撑件,该张紧支撑件与设置有螺栓的接合拉拔元件功能性连接,此螺栓穿过固定于基体的支撑套筒并具有拧到其上的滚花螺母,该滚花螺母与支撑套筒相接触。
3.采用这种设备并且根据情况,可以相对不费力地进行牙根拔除,其中固定于牙根中并与张紧设备的拉拔元件连接的销可借助于通过手动旋转滚花螺母而被部分地引入到口腔中并支撑在口腔中的张紧设备而受到拉拔力,于是利用销将牙根拔除。结果,通过手动致动可以实现可靠地拔除牙根。
4.以这种通用设备为出发点,本发明的目的是提供这种设备以及控制该设备的方法,借助于该设备和方法有可能以至少部分自动化的方式进行这种牙根的拔除,而牙医通常无需手动参与拔除手术。
5.此目的根据本发明分别通过权利要求1和权利要求10的特征得到解决。
6.根据本发明,拉拔元件可借助于分配给拉拔机构的可控电机来提供这种拉拔力,以便特别是可以拔除牙根。
7.一种设备包括前口腔侧支撑件、在此支撑件中被引导的拉拔元件和可与此支撑件连接的拉拔机构,其中拉拔元件在前部偏转成与支撑件的纵向延伸大致成直角,并且可以与可固定于牙根中的销或类似元件连接。
8.非常有利的是,利用控制此设备的方法,通过优选将拉拔机构的电机的电输出增加到预定的固定或可变值来手动或自动地增大拉拔元件的拉拔力,并且在此之后,当牙根已经脱离时,将电机的输出减少到特定值或减少到零。
9.因此,本领域的技术人员(特别是牙医)可以在几乎没有手动介入的情况下非常容易和极其可靠地进行牙根拔除。这种外科手术介入对于患者来说也是极其舒适的,并且整个程序可以按控制得更好的顺序进行,没有并发症的风险。牙医可以根据本发明应用对此设备的这种控制,并因此利用快速学习曲线进行拔除。
10.由于拉拔机构的电机的电输出自动调节到最大拉拔力,并且当牙根已经脱离时此输出相应地减少,因此这种拔除可以按极其简单的方式进行,并且可以使牙医的活动限于监视手术的过程,顺序不会有任何扰乱。
11.非常有利的是,将用于拉拔机构的可控电动旋转电机用作电机,利用该电机,通过检测其每单位时间旋转的速度,可以确定拉拔元件的调节路径和调节速度。
12.此外,采用根据本发明的设备,将具有可控电机的拉拔机构设置在具有前侧支撑件的壳体中,并由控制设备进行致动和控制,其方式使得这种牙根拔除可以在没有手动介入情况下进行。
13.在下文根据示例性实施例并通过参考附图更详细地解释本发明及其进一步的优点。图中示出:
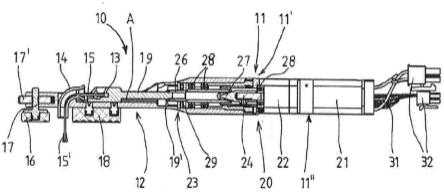
14.图1根据本发明的设备的纵向截面,
15.图2依照图1的根据本发明的设备的透视侧视图,其中旋转电机和减速齿轮示出为与支撑件分开,分别作为一个模块化单元,且
16.图3电机施加在拉拔元件上的拉拔力的曲线图以及拉拔元件的调节路径图,分别基于时间。
17.图1和图2示出尤其用于拔除牙根的设备10,更多的细节没有示出,其特别用在牙科技术中。关于牙根,牙齿可能部分或完全折断或已经被摘除,并且这也可以涉及自然的或人工的根部或带有人工部分的根部。
18.设备10包括多部件壳体11和与其连接的前支撑件12,分别具有纵向构造。在支撑件12中被纵向引导的是拉拔元件15和与此连接的运载架19,后者在支撑件12的引导途径12’中被引导,基本上没有游隙,并且可以在后端与拉拔机构20连接。拉拔元件15围绕角形引导元件14在前侧偏转成与支撑件12的纵向延伸大致成直角,并且在其前端包括连接元件15’,该连接元件15’可与通过悬挂到牙根中、拧入牙根或以一些其它方式固定于牙根中的销或类似元件连接。
19.在前侧,并且在偏转的拉拔元件15之后,支撑件12分别设有支撑夹爪16、18,其中的至少一个可借助于具有螺母17’的调节螺钉17进行调节,同样与支撑件12成直角,以便调节设备10在患者口腔中的对准,其方式使得拉拔元件15的拉拔方向有效地沿着牙根方向,使得如果拉拔的方向要偏离间隙的轴向方向的话,则在拔除期间不会出现干扰性的侧向摩擦力。具有拉拔元件15的引导件的前侧支撑件12的构造和尺寸大小当然可以根据要求而不同。
20.根据本发明,壳体11中的拉拔机构20设置有用于为拉拔元件15产生拉拔力的可控电机21,其由控制设备致动和控制,其方式使得利用此电机21,可以将这种拉拔力施加到拉拔元件15上,使得有可能拔除牙根而无需手动介入。
21.非常有利的是,此电机被构造为旋转电机21,其被布置在壳体11中的后侧,并且设置有连接插头32的连接缆线31自此引向后部。减速齿轮22与该旋转电机21同轴设置在壳体11中,可旋转地连接有驱动轴以及转换元件23,转换元件23用于将旋转移动转换成线性移动,用以调节运载架19,并因此调节支撑件中的拉拔元件15。
22.转换元件23由与减速齿轮22的驱动轴24可旋转地连接的螺纹套筒26以及运载架19的螺纹心轴19’形成。驱动轴24可经由联结构件27与螺纹套筒26同轴连接,其中后者通过滑动轴承28和通过至少一个轴向轴承29被周向支撑在壳体中,其方式为确保由此产生的拉拔力,在拔除期间主要沿轴线a,将被可靠地吸收。
23.为了控制的目的,旋转电机21通过连接缆线31与控制设备电连接,更多的细节没有示出。为此,一方面为电源提供了连接缆线31,并且另一方面为旋转电机21的控制元件和测量元件提供了连接缆线31,作为与外部设备中的控制设备的连接,借助于此可以按程控方式执行所需的控制和测量功能。
24.优选通过电机的可调节的电流强度来影响施加在旋转电机21的转子上的旋转扭矩。因此,拉拔元件15上的拉拔力f相应地是借助于控制设备进行调节的,并且在拔除过程
期间被自动控制。为此,旋转电机21有利的是配备有转速测量设备,更多的细节没有示出。因此,当前转速可通过传输到控制设备的信号进行检测,并且可以由其进行评估。
25.旋转电机21可以为例如具有无铁绕组的无刷dc电机,利用该电机,转速有可能接近无级变速,如通过马克森公司(maxon)的马克森ec电机类型已知的那样。集成在此旋转电机中的是这样的转速测量设备,其通过作为测量元件的霍尔传感器以固有已知的方式起作用。
26.作为减速齿轮22,也可以利用马克森齿轮类型的来自马克森公司的设备,其被构造为行星式齿轮。因此没有对这些进行任何更多细节的解释。当然有可能使用适合所需功能的其它电机和齿轮。
27.采用行星式齿轮,有可能使电机的转速从例如100至1000转/分钟之间降低到每分钟几转,并且采用转换元件23,采用例如一毫米的螺距,有可能将运载架19的纵向调节以及因此将拉拔元件15的纵向调节沿轴线a每分钟调节几毫米,其结果是可以最佳地确定拔除力。
28.此旋转电机21和行星式齿轮22两者的特征在于,在有足够输出的情况下,它们表现出小的圆筒外径,如15至30毫米,使得壳体11可同样采用手柄形状的圆筒外形进行尺寸设计,其直径适于握起的手掌。壳体11的外壳可由粗糙化的材料或合适的抓握材料制成,以便允许牢固地握持。在这种情况下其由彼此紧挨着布置的相同直径的几个圆筒组成,其中旋转电机21和减速齿轮22形成结构单元或模块11”,且支撑件12与圆筒形成结构单元或模块11’,它们可以相互插入并以抵抗旋转的方式固定。
29.根据图3的曲线图,示出了在拔除时控制设备10的方法。在这种情况下,横坐标表示时间t,且两个纵坐标一方面表示拉拔元件15作用在牙根上的拉拔力f,另一方面分别表示拉拔元件15和牙根的每单位时间的移动路径s。
30.在拔除过程期间,如以常规方式准备的那样,将具有支撑件12的此设备10放入患者的口腔中并对准,其方式使得要拔除的牙根与拧入其中的销位于拉拔元件15中,在拉拔元件15下方或上方,指向与支撑件12成直角,并且后者的连接元件15’悬挂或以其它方式连接在销的端部。
31.如在这之前所示,必须要注意确保拉拔轴线和牙根轴线,其中牙根由纤维固持,彼此大致相同或同轴延伸对准,以便为畅通无阻的可能拔除创造最佳条件。这可在轴承12处通过安装在其中的螺母17’以及通过调节螺钉17和与其相互作用的轴承夹爪16来相应地进行调节。
32.当牙医或专业人员已经正确且牢固地将设备10放置在口腔中时,他可以借助于开关元件将旋转电机21设置成运动,例如通过踏板或手动开关,并启动拉拔,使得拉拔元件15以自动化的方式移动,具有每单位时间大致恒定的小调节路径或移动速度s1和针对壳体11沿轴线a远离牙根的拉拔力f1。
33.一旦拉拔元件15采取伸展状态,移动速度随着低拉拔力f1起作用而下降到接近零的值s0,这取决于设备10的定位而可能发生在仅仅几毫米的移动路径之后。通过测量旋转电机21的转速,检测到这种其移动速度降低到接近零,并通过信号传输通知给控制设备。
34.接下来,通过增加旋转电机21的电输出,拉拔力f自动增加到预定的固定或可变最大值f
max
。结果,最大量的拉拔力f
max
被传递到牙根上面。通常,在增加的拉拔力f
max
开始时,
拉拔元件15从移动速度s0为零快速增加到导出值s
01
,这是由于事实上首先是拉拔元件15、然后是转换元件23和旋转电机21被延伸或调节到完全张紧。在此之后,在最大拉拔力f
max
时的移动速度s
01
将根据牙根的阻力而略微增加,如图3中所示。
35.也有可能以这样的方式进行,即拉拔元件15一开始并不移动,并且其仅在将负荷施加到将牙根固持在颚骨中的纤维上经一定的时段之后才移动。在本发明的框架内可以提供的是,牙医在拉拔过程期间致动开关元件,使得旋转电机21自动产生可变的最大值f
max
,以便由此改善牙根的脱离。此最大值f
max
可以通过自动化的方式减少例如一半,然后再次增加到满值,并且这样可以作为振荡力模式发生若干次。也可能发生的是牙根以楔形定位在颚骨中,然后牙医试图用适当的工具使其脱离。
36.当牙根已经脱离颚骨或者至少根部的阻力已经减小时,旋转电机21的输出以及因此拉拔力f
max
减少到特定值f2,然后减少到作为停止的值f0。这取决于牙根已经被拔出多远,以及在任何情况下其是否在引导元件14的下方。一旦牙根已经变得脱离,或者根部的阻力已经减小,这就导致在最大量的拉拔力下移动速度s2增加。这由控制设备识别,并且程序设计为使电机输出立即减小。
37.作为替代方案,拉拔元件15在支撑件12中的移动路径可以通过参考其纵向位置来确定。在拔除之前电机输出的增加和/或其在牙根脱离之后的减少将根据拉拔元件的参考纵向位置而不是通过其移动速度来确定。拉拔元件的移动路径可以通过旋转电机21的转速来计算并相应地控制。
38.也可以通过开关元件的手动致动来进行电机输出的改变,其中借助于拉拔机构来启动、中断或停止拔除。
39.已经通过在这之前阐述的示例性实施例充分描述了本发明。然而,当然也可以通过进一步的变型方案进行阐述。
40.原则上,可以将旋转电机以及适当时还有减速齿轮集成在外部设备中,并且旋转移动和/或线性移动可以通过设备与壳体之间的柔性管等中的传输元件与拉拔元件连接。如前述示例性实施例所描述的那样,减速齿轮可同样容纳在壳体中,并且其将然后与可旋转的传输元件联结。
41.也有可能设置线性电机或旋转电机,其通过诸如螺母/螺纹心轴直接与拉拔元件连接。拉拔元件可以被构造为多于一个的纵向元件,优选具有平行取向,并且分别使用线缆等。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。