技术特征:
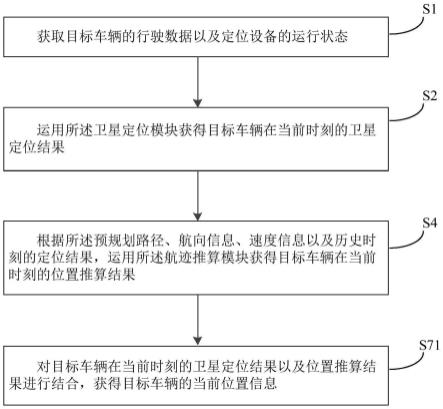
1.一种拖拉机的自动定位方法,其特征在于,包括以下步骤:s1,获取目标车辆的行驶数据以及定位设备的运行状态;所述行驶数据包括目标车辆的预规划路径、航向信息、速度信息以及历史时刻的定位结果;目标车辆所设的定位设备包括卫星定位模块以及航迹推算模块;所述卫星定位模块以及航迹推算模块的运行状态均为良好时,执行以下步骤:s2,运用所述卫星定位模块获得目标车辆在当前时刻的卫星定位结果;s4,根据所述预规划路径、航向信息、速度信息以及历史时刻的定位结果,运用所述航迹推算模块获得目标车辆在当前时刻的位置推算结果;s71,对目标车辆在当前时刻的卫星定位结果以及位置推算结果进行结合,获得目标车辆的当前位置信息。2.根据权利要求1所述的拖拉机的自动定位方法,其特征在于,所述卫星定位模块以及航迹推算模块的运行状态良好时,在所述步骤s2与s4之间还包括以下步骤:s3,根据所述卫星定位结果对所述航迹推算模块进行校正。3.根据权利要求1所述的拖拉机的自动定位方法,其特征在于,所述卫星定位模块的运行状态不良且所述航迹推算模块的运行状态良好时,执行以下步骤:s4,根据所述预规划路径、航向信息、速度信息以及历史时刻的定位结果,运用所述航迹推算模块获得目标车辆在当前时刻的位置推算结果;s72,以目标车辆在当前时刻的位置推算结果作为目标车辆的当前位置信息。4.根据权利要求1或2所述的拖拉机的自动定位方法,其特征在于,所述卫星定位模块采用gps和/或clonass和/或北斗导航系统中的一种或组合进行卫星定位。5.根据权利要求1至3任一项所述的拖拉机的自动定位方法,其特征在于,所述航迹推算模块采用惯性导航、地图匹配以及动态滤波的方式获得目标车辆在当前时刻的位置推算结果。6.根据权利要求1所述的拖拉机的自动定位方法,其特征在于,目标车辆所设的定位设备还包括激光slam模块;所述卫星定位模块以及航迹推算模块的运行状态不良且所述激光slam模块的运行状态良好时,执行以下步骤:s5,运用所述激光slam模块获得目标车辆在当前时刻的slam定位结果;s73,以目标车辆在当前时刻的slam定位结果作为目标车辆的当前位置信息。7.根据权利要求6所述的拖拉机的自动定位方法,其特征在于,目标车辆所设的定位设备还包括视觉辅助定位模块;所述卫星定位模块、航迹推算模块以及激光slam模块的运行状态不良时,执行以下步骤:s6,运用所述视觉辅助定位模块获取获得目标车辆在当前时刻的短距离定位结果;s74,以目标车辆在当前时刻的短距离定位结果作为目标车辆的当前位置信息。8.一种拖拉机,其特征在于:其设有卫星定位模块以及航迹推算模块,还设有存储介质、处理器以及储存在所述存储介质中并可被所述处理器执行的计算机程序,所述计算机程序被处理器执行时实现如权利要求1至5任一项所述的拖拉机的自动定位方法的步骤对所述拖拉机进行定位。
9.根据权利要求8所述的拖拉机,其特征在于:其还设有激光slam模块以及视觉辅助定位模块,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的拖拉机的自动定位方法的步骤对所述拖拉机进行定位。10.一种存储介质,其上储存有计算机程序,其特征在于:所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的拖拉机的自动定位方法的步骤。
技术总结
本发明针对现有技术的局限性,提出了一种拖拉机的自动定位方法,采用卫星定位与航迹推算融合的定位技术,对处在各种光线强度、天气等外部环境条件下的拖拉机辆的自动定位设计了控制策略,能让拖拉机辆在不同的信号环境以及行驶环境下,获得有效的定位信息,从而能够选择有关预选择区域的信息,使得拖拉机辆的操作机构可以提前预判信息点,适时的分析和研判执行措施或预警程序。执行措施或预警程序。执行措施或预警程序。
技术研发人员:张园 韦丽娇 郑军 郑鸿基 邓干然 王昌权 欧忠庆 郭昌进 刘智强
受保护的技术使用者:中国热带农业科学院农业机械研究所
技术研发日:2022.08.24
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。