1.本发明涉及一种基于风电机组和电动汽车的微电网鲁棒频率控制方法,属于微电网频率控制技术领域。
背景技术:
2.微电网是由分布式电源、负荷和监控、保护装置组成的小型发配电系统。微电网概念的引入为风力发电等新能源接入电力系统提供了新的途径。风电机组发出功率具有波动性,且通过电力电子变流器接入微电网,其机械转子速度与系统频率解耦,会对微电网调频产生不利影响,因此迫切需要风电机组参与系统调频。电动汽车具有储能的特性,已经有研究将电动汽车应用于微电网调频。
3.现有技术未考虑如何克服风力波动和电动汽车充放电随机性对调频的影响,也未计及风机参与调频对于风机本身的不利影响,例如加剧次同步振荡、加重机械磨损、缩短风机寿命等。因此,研究如何对风电机组和电动汽车进行协同调频控制,同时减小不确定性和外界扰动的不利影响,具有极高的实用性。
技术实现要素:
4.为了克服上述问题,本发明提供一种基于风电机组和电动汽车的微电网鲁棒频率控制方法,该方法充分挖掘风电机组和电动汽车的调频潜力,同时利用h
∞
鲁棒控制抑制不确定性及外界扰动对调频的不利影响,减小微电网在功率波动下的频率扰动。
5.本发明的技术方案如下:
6.一种基于风电机组和电动汽车的微电网鲁棒频率控制方法,包括以下步骤:
7.基于风电机组的减载控制建立风电机组参与调频的小信号模型;
8.基于能量聚合器构建电动汽车统一控制模型;
9.基于风电机组的小信号模型和电动汽车统一控制模型建立微电网动态频率响应模型;
10.根据设计目标,确定性能加权函数和控制加权函数,基于线性矩阵不等式的方法求解h
∞
鲁棒频率控制器。
11.进一步的,所述基于风电机组的减载控制建立风电机组参与调频的小信号模型,具体为:
12.建立运行于减载模式下风机的转子运动方程,方程如下:
[0013][0014]
pe=k
del
ω3 p
reg
[0015][0016]
其中,ρ为空气密度;a为风力机叶片迎风扫掠面积;c
p
(λ,0)为风能利用系数,其中
λ为叶尖速比;vw为实际风速;pm、pe、c
pref
、ω和ν分别为风机的机械功率、电磁功率、转子角速度、风能利用系数和外界风速的标幺值;k
del
为风机的功率减载系数;h
t
为风机的惯性时间常数;t为时间;pb为基准功率;k
p
为比例系数;p
reg
为用于调节系统频率的补偿功率的标幺值;
[0017]
采用小信号分析方法对所述运行于减载模式下风机的转子运动方程进行线性化,得到下式:
[0018]
δpm=a1·
δβ a2·
δω a3·
δv
[0019][0020][0021][0022]
δpe=3k
del
ω2δω δp
reg
[0023]
δp
m-δpe=2h
t
ωdδω/dt;
[0024]
其中,δpm、δβ、δω、δv分别为风机的机械功率、桨距角、转子角速度和外界风速的变化量;a1、a2、a3为推导所用的中间变量;k
λ
为c
pref
对λ的偏导,k
β
为c
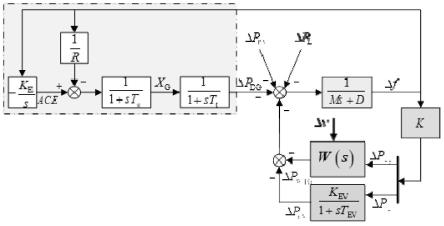
pref
对β的偏导;
[0025]
根据线性化后的转子运动方程通过消去中间变量的方法得到过速减载状态下变速风电机组的小信号模型,如下:
[0026][0027]
δpe=3k
del
ω2δω δp
reg
;
[0028]
其中δpe、δp
reg
分别为风机电磁功率和补偿功率的变化量。
[0029]
进一步的,所述基于能量聚合器构建电动汽车统一控制模型,具体为:
[0030]
建立单量电动汽车的一阶动态模型,如下:
[0031][0032]
其中,δp
ev,i
为第i辆电动汽车发出有功功率;δp
rev,i
为第i辆电动汽车接受自控制器的功率参考;εi为第i辆电动汽车的接入状态信号,当电动汽车接入电网时其值为1,否则为0;soci第i辆电动汽车的充放电状态;k
ev,i
和t
ev,i
分别为第i辆电动汽车的增益系数和惯性时间常数;s为拉普拉斯算子。
[0033]
根据所述单量电动汽车的一阶动态模型得到所有可接入电动汽车能量聚合器的发出有功功率δp
ev
,如下:
[0034][0035]
其中,n为可接入电动汽车的最大数量;
[0036]
令所有电动汽车的惯性时间常数均等于t
ev
;
[0037]
能量聚合器的功率参考值δp
rev
如下:
[0038][0039]
得到电动汽车统一控制模型,如下:
[0040][0041]
其中,k
ev
为等值电动汽车增益系数,表达式如下:
[0042][0043]
进一步的,所述基于风电机组的小信号模型和电动汽车统一控制模型建立微电网动态频率响应模型中,风电机组和电动汽车协同调频后,采用状态空间建模方法建立包含风机、光伏、柴油机和电动车的微电网动态频率响应模型为:
[0044][0045]
y=cx;
[0046]
其中,a为状态矩阵,b1、b2分别为扰动输入矩阵和控制输入矩阵,c为输出矩阵。外界扰动d=[δp
pv δp
l δv]
t
,控制输入u=[δp
reg δp
rev
]
t
,测量输出y=δf,状态变量x=[δf δp
dg x
g ace δω δp
ev
]
t
;δp
dg
、δp
pv
、和δp
l
为柴油机、光伏和负荷的功率波动;δf为系统的频率偏差;xg为调速器输出;ace为ace控制输出;δp
l
为负荷功率波动。a、b1、b2、c的具体表达式如下:
[0047]
[0048][0049]
c=[1 0 0 0 0 0];
[0050]
m和d分别为系统的惯性常数与阻尼系数,是摄动参数;t
t
为柴油发电机的时间常数;tg为调速器时间常数;r为调速系数;ke为积分控制增益。
[0051]
进一步的,设计目标为在外界扰动存在的情况下,找到一个可实现的控制器,合理协调变速风电机组和电动汽车的出力,使得闭环控制系统稳定并且减小微电网在外界扰动下的频率波动。
[0052]
进一步的,输入信号包括扰动信号和参考输入信号,参考信号减去扰动信号与测量输出信号之和得到误差信号,误差信号输入所设计控制器得到控制输出信号,控制器输入信号经过微电网状态空间模型计算得到测量输出信号,测量输出信号与性能加权函数之积加上控制输出信号与控制加权函数之积得到性能输出信号。
[0053]
进一步的,性能加权函数we和wu控制加权函数如下:
[0054][0055][0056]
进一步的,将h
∞
鲁棒频率控制器的求解问题转化为如下的求h
∞
范数最优化问题:
[0057]
||t
zw
(s)||
∞
≤1;
[0058]
将所述求h
∞
范数最优化问题转化为寻找一个对称正定矩阵p满足:
[0059][0060]
采用换元法将上述不等式转化为线性矩阵不等式,求得所述h
∞
鲁棒频率控制器的解。
[0061]
本发明具有如下有益效果:
[0062]
该方法充分挖掘风电机组和电动汽车的调频潜力,同时利用h
∞
鲁棒控制抑制不确定性及外界扰动对调频的不利影响,减小微电网在功率波动下的频率扰动。
附图说明
[0063]
图1为本发明一种实施方式的微电网动态频率响应模型图。
[0064]
图2为本发明一种实施方式的闭环控制系统框图。
[0065]
图3为本发明一实施例的微电网频率波动图。
具体实施方式
[0066]
下面结合附图和具体实施例来对本发明进行详细的说明。
[0067]
实施例一
[0068]
一种基于风电机组和电动汽车的微电网鲁棒频率控制方法,包括以下步骤:
[0069]
基于风电机组的减载控制建立风电机组参与调频的小信号模型;
[0070]
基于能量聚合器构建电动汽车统一控制模型;
[0071]
基于风电机组的小信号模型和电动汽车统一控制模型建立微电网动态频率响应模型;
[0072]
根据设计目标,确定性能加权函数和控制加权函数,基于线性矩阵不等式的方法求解h
∞
鲁棒频率控制器。
[0073]
该方法充分挖掘风电机组和电动汽车的调频潜力,同时利用h
∞
鲁棒控制抑制不确定性及外界扰动对调频的不利影响,减小微电网在功率波动下的频率扰动。
[0074]
实施例二
[0075]
参考图1-2,一种基于风电机组和电动汽车的微电网鲁棒频率控制方法,在实施例一的基础上,所述基于风电机组的减载控制建立风电机组参与调频的小信号模型,具体为:
[0076]
建立运行于减载模式下风机的转子运动方程,方程如下:
[0077][0078]
pe=k
del
ω3 p
reg
[0079][0080]
其中,ρ为空气密度;a为风力机叶片迎风扫掠面积;c
p
(λ,0)为风能利用系数,其中λ为叶尖速比;vw为实际风速;pm、pe、c
pref
、ω和ν分别为风机的机械功率、电磁功率、转子角速度、风能利用系数和外界风速的标幺值;k
del
为风机的功率减载系数;h
t
为风机的惯性时间常数;t为时间;pb为基准功率;k
p
为比例系数;p
reg
为用于调节系统频率的补偿功率的标幺值;
[0081]
采用小信号分析方法对所述运行于减载模式下风机的转子运动方程进行线性化,得到下式:
[0082]
δpm=a1·
δβ a2·
δω a3·
δv
[0083]
[0084][0085][0086]
δpe=3k
del
ω2δω δp
reg
[0087]
δp
m-δpe=2h
t
ωdδω/dt;
[0088]
其中,δpm、δβ、δω、δv分别为风机的机械功率、桨距角、转子角速度和外界风速的变化量;a1、a2、a3为推导所用的中间变量;k
λ
为c
pref
对λ的偏导,k
β
为c
pref
对β的偏导;
[0089]
根据线性化后的转子运动方程通过消去中间变量的方法得到过速减载状态下变速风电机组的小信号模型,如下:
[0090][0091]
δpe=3k
del
ω2δω δp
reg
;
[0092]
其中δpe、δp
reg
分别为风机电磁功率和补偿功率的变化量。
[0093]
在本发明的一种实施方式中,所述基于能量聚合器构建电动汽车统一控制模型,具体为:
[0094]
建立单量电动汽车的一阶动态模型,如下:
[0095][0096]
其中,δp
ev,i
为第i辆电动汽车发出有功功率;δp
rev,i
为第i辆电动汽车接受自控制器的功率参考;εi为第i辆电动汽车的接入状态信号,当电动汽车接入电网时其值为1,否则为0;soci第i辆电动汽车的充放电状态;k
ev,i
和t
ev,i
分别为第i辆电动汽车的增益系数和惯性时间常数;s为拉普拉斯算子。
[0097]
根据所述单量电动汽车的一阶动态模型得到所有可接入电动汽车能量聚合器的发出有功功率δp
ev
,如下:
[0098][0099]
其中,n为可接入电动汽车的最大数量;
[0100]
令所有电动汽车的惯性时间常数均等于t
ev
,即t
ev
=t
ev,i
,i=1,2,
…
,n;由于不同电动汽车的时间常数基本相同,因此可以通过该方式提高控制效率;
[0101]
能量聚合器的功率参考值δp
rev
如下:
[0102][0103]
即能量聚合器的功率参考值δp
rev
为所有电动汽车功率参考值之和;
[0104]
得到电动汽车统一控制模型,如下:
[0105]
[0106]
其中,k
ev
为等值电动汽车增益系数,表达式如下:
[0107][0108]
在本发明的一种实施方式中,所述基于风电机组的小信号模型和电动汽车统一控制模型建立微电网动态频率响应模型中,风电机组和电动汽车协同调频后,采用状态空间建模方法建立包含风机、光伏、柴油机和电动车的微电网动态频率响应模型为:
[0109][0110]
y=cx;
[0111]
其中,a为状态矩阵,b1、b2分别为扰动输入矩阵和控制输入矩阵,c为输出矩阵。外界扰动d=[δp
pv δp
l δv]
t
,控制输入u=[δp
reg δp
rev
]
t
,测量输出y=δf,状态变量x=[δf δp
dg x
g ace δω δp
ev
]
t
;δp
dg
、δp
pv
、和δp
l
为柴油机、光伏和负荷的功率波动;δf为系统的频率偏差;xg为调速器输出;ace为ace控制输出;δp
l
为负荷功率波动。a、b1、b2、c的具体表达式如下:
[0112][0113]
[0114]
c=[1 0 0 0 0 0];
[0115]
m和d分别为系统的惯性常数与阻尼系数,是摄动参数;t
t
为柴油发电机的时间常数;tg为调速器时间常数;r为调速系数;ke为积分控制增益。
[0116]
实施例三
[0117]
一种基于风电机组和电动汽车的微电网鲁棒频率控制方法,在实施例二的基础上,设计目标为在外界扰动存在的情况下,找到一个可实现的控制器,合理协调变速风电机组和电动汽车的出力,使得闭环控制系统稳定并且减小微电网在外界扰动下的频率波动。
[0118]
在本发明的一种实施方式中,输入信号包括扰动信号和参考输入信号,参考信号减去扰动信号与测量输出信号之和得到误差信号,误差信号输入所设计控制器得到控制输出信号,控制器输入信号经过微电网状态空间模型计算得到测量输出信号,测量输出信号与性能加权函数之积加上控制输出信号与控制加权函数之积得到性能输出信号。
[0119]
在本发明的一种实施方式中,性能加权函数we和wu控制加权函数如下:
[0120][0121][0122]
进一步的,将h
∞
鲁棒频率控制器的求解问题转化为如下的求h
∞
范数最优化问题:
[0123]
||t
zw
(s)||
∞
≤1;
[0124]
将所述求h
∞
范数最优化问题转化为寻找一个对称正定矩阵p满足:
[0125][0126]
采用换元法将上述不等式转化为线性矩阵不等式,求得所述h
∞
鲁棒频率控制器k
∞
(s):
[0127][0128]
其中:
[0129][0130]
仿真场景:外界风速恒为0.9(p.u.),50s时负载功率减小0.1(p.u.)。
[0131]
仿真结果如图3所示,可以看出本发明所提出方法可以减小微电网在功率变化下的频率波动。
[0132]
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
