1.本发明属于医疗智能机器人控制技术领域,具体涉及一种胰十二指肠康复针灸机器人定位运动的智能控制方法。
背景技术:
2.随着机器人技术的不断进步,带动了医疗手术机器人在外科临床的不断应用,对患者的术后康复效果,也需要智能装备进行辅助治疗,为此,在我们研发技术团队与中国医学院北京协和医院合作的基础上,又进行针对胰腺与十二指肠术后康复治疗的过程中,联合研制一种术后康复针灸机器人。在研究的过程中,通过查阅近期的文献,可知:胰腺与十二指肠康复针灸机器人定位运动的智能控制方法,还是处于国内空白。因此,为了填补国内空白,为我国医疗技术,继续作出贡献,我们研发团队,公开本发明的技术方法。
3.胰腺与十二指肠康复针灸机器人定位运动的智能控制方法的最大优点是,能够精准的定位患者的预订空间位置,能够通过空间三维图像,实现立体重构三维空间影像。解决了精准定位患者的拟定目标穴位。为患者早日康复,奠定良好的治疗基础。
技术实现要素:
4.为解决上述背景技术中提出的问题。本发明提供了一种胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法,具有方便使用的特点。
5.为实现上述目的,本发明提供如下技术方案:一种胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法,主要涉及了智能控制体系中的人工智能方面的控制方法,其核心控制策略是基于神经网络控制与pid控制相结合的控制方法。所述神经网络控制,包括神经网络控制bp权值控制与pid控制单元。
6.所述,胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制单元中,被设计了神经网络控制器、神经网络控制辨识器、pid控制器等。
7.所述,神经网络控制器、被设置在智能控制器的中心;神经网络控制辨识器,被设置在智能控制器的两端;pid控制器,被设置在智能控制器的后端。
8.所述,神经网络控制辨识器单元,被用于进行信息数据的感知与识别,在处理完信息数据后,再将被处理的结果信息,传送到神经网络控制器单元中。
9.所述,神经网络控制器单元,被用于进行信息数据的复杂性的、非线性的综合处理,在处理完信息数据后,再将被处理的结果信息,传送到pid控制单元中。
10.所述,pid控制单元,被用于接收神经网络控制器的输出信息并且控制胰十二指肠康复针灸机器人的相关执行单元。
11.优选的,胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,被设置为,设备自检,检测正常,被设置执行下一单元操作,
12.检测异常,被设置为报警。
13.优选的,胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,被设置为,初始化系统参数。
14.优选的,胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,被设置为,辨识风向信息数据、风速信息数据、航向信息数据、与本体定位信息数据等。
15.优选的,胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,被设置为,俯仰、保持或停止、横滚、偏置等定位运动操作。
16.与现有技术相比,本发明的有益效果是:本发明一种用于人体腹部有限空间环境的神经网络控制与pid控制胰十二指肠康复针灸机器人方法,主要包括了智能控制体系中的人工智能方面的控制方法,其核心控制策略是基于神经网络控制与pid控制相结合的控制方法,神经网络控制,涉及了神经网络控制bp权值控制与pid控制单元。胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制单元中,被设计了神经网络控制器、神经网络控制辨识器、pid控制器等。神经网络控制器、被设置在智能控制器的中心;神经网络控制辨识器,被设置在智能控制器的两端;pid控制器,被设置在智能控制器的后端。神经网络控制辨识器单元,被用于进行信息数据的感知与识别,在处理完信息数据后,再将被处理的结果信息,传送到神经网络控制器单元中。神经网络控制器单元,被用于进行信息数据的复杂性的、非线性的综合处理,在处理完信息数据后,再将被处理的结果信息,传送到pid控制单元中。pid控制单元,被用于接收神经网络控制器的输出信息并且控制胰十二指肠康复针灸机器人的相关执行单元。胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,被设置为,设备自检,检测正常,被设置执行下一单元操作,检测异常,被设置为报警。胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,被设置为,初始化系统参数。胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,被设置为,辨识风向信息数据、风速信息数据、航向信息数据、与本体定位信息数据等。胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,被设置为,俯仰、保持或停止、横滚、偏置等定位运动操作。
17.胰腺与十二指肠康复针灸机器人定位运动的智能控制方法的最大优点是,能够精准的定位患者的预订空间位置,能够通过空间三维图像,实现立体重构三维空间影像。解决了精准定位患者的拟定目标穴位。为患者早日康复,奠定良好的治疗基础。
附图说明
18.图1为本发明的总流程图;
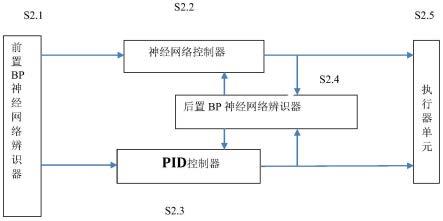
19.图2为本发明的智能控制图;
20.图中:
21.1、总流程图;s1.1、初始化参数;s1.2、设备自检;s1.3、bp神经网络控制辨识器;
s1.4、神经网络控制器;s1.5、pid控制器;s1.6、执行器(俯仰、停止、横滚、偏置)。
22.2、神经网络控制与pid控制图;s2.1、bp神经网络控制辨识器(前置);s2.2、神经网络控制器;s2.3、pid控制器;s2.4、bp神经网络控制辨识器(后置);s2.5、执行器(俯仰、停止、横滚、偏置)。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.请参阅图1-2,本发明提供以下技术实施方案:一种胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法,主要涉及了智能控制体系中的人工智能方面的控制方法,其核心控制策略是基于神经网络控制与pid控制相结合的控制方法。所述神经网络控制,包括神经网络控制bp权值控制s2.1、s2.2s、s2.4与pid控制单元s2.3。
25.本实施例中,胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制单元中,被设计了神经网络控制器s2.2、神经网络控制辨识器s2.1~s2.2、pid控制器s2.等。
26.本实施例中,神经网络控制器s2.2、被设置在智能控制器的中心;神经网络控制辨识器s2.1,被设置在智能控制器的两端;pid控制器s2.4,被设置在智能控制器的后端。
27.本实施例中,神经网络控制辨识器单元s2.1、s2.3,被用于进行信息数据的感知与识别,在处理完信息数据后,再将被处理的结果信息,传送到神经网络控制器单元中。
28.本实施例中,神经网络控制器单元s2.2,被用于进行信息数据的复杂性的、非线性的综合处理,在处理完信息数据后,再将被处理的结果信息,传送到pid控制单元中。
29.本实施例中,优选的,胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,被设置为,初始化系统参数s1.1。
30.本实施例中,优选的,胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,被设置为,设备自检s1.2,检测正常,被设置执行下一单元操作,检测异常,被设置为报警。
31.本实施例中,优选的,胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,被设置为,神经网络控制辨识s1.3:风向信息数据、风速信息数据、航向信息数据、与本体定位信息数据等。
32.本实施例中,优选的,胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,被设置为,俯仰、保持或停止、横滚、偏置等定位运动操作。
33.本发明的工作原理及使用流程:本发明一种胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法,主要涉及了智能控制体系中的人工智能方面的控制方法,其核心控制策略是基于神经网络控制与pid控制相结合的控制方法。神经网络控制,包括神经网络控制bp权值控制s2.1、s2.2s、s2.4与pid控制单元s2.3。胰十二指肠康复
针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制单元中,被设计了神经网络控制器s2.2、神经网络控制辨识器s2.1~s2.2、pid控制器s2.等。神经网络控制器s2.2、被设置在智能控制器的中心;神经网络控制辨识器s2.1,被设置在智能控制器的两端;pid控制器s2.4,被设置在智能控制器的后端。神经网络控制辨识器单元s2.1、s2.3,被用于进行信息数据的感知与识别,在处理完信息数据后,再将被处理的结果信息,传送到神经网络控制器单元中。神经网络控制器单元s2.2,被用于进行信息数据的复杂性的、非线性的综合处理,在处理完信息数据后,再将被处理的结果信息,传送到pid控制单元中。胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,被设置为,初始化系统参数s1.1。胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,被设置为,设备自检s1.2,检测正常,被设置执行下一单元操作,检测异常,被设置为报警。胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,被设置为,神经网络控制辨识s1.3:风向信息数据、风速信息数据、航向信息数据、与本体定位信息数据等。胰十二指肠康复针灸机器人定位运动在人体腹部有限空间环境的智能控制方法中,神经网络控制bp权值控制与pid控制策略,被设置为,俯仰、保持或停止、横滚、偏置等定位运动操作。
34.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。