1.本发明涉及一种同轴串联三维机械自解耦力传感器,属于传感器技术领域。
背景技术:
2.传感器是一种能感受规定的被测量并且按照一定的规律转换成可用信号的器件和装置,通常由敏感元件和弹性元件组成。多维力传感器是一种可以同时检测两个方向及以上力和力矩信息的测力传感器,广泛应用于智能制造、医疗卫生以及生物工程等领域。
3.现阶段的三维乃至多维力传感器主要分为电阻应变式、压电式、电容式力传感器,这些传感器的构造均是在一定形状的弹性元件上粘贴或用其他方法安装应变敏感元件。当力作用在传感器上时,传感器内的弹性元件发生变形,同时安装在其上面的应变敏感元件也发生变形,应变敏感元件的阻值随之变化,接着由变换电路将阻值变化变换成电压变化输出,由此可以根据电压变化量来确定力的大小。
4.但是就现有的技术而言,对于当传感器同时承受轴向应力、扭转力和弯曲应力的情况时,现在的解决方法往往是通过将应变片组成桥路进行补偿以及解耦,在机械结构上并不具备实现扭转应力、弯曲应力和轴向应力的解耦能力。
5.现有技术中虽然存在能够机械结构的多维力/力矩传感器,但是并不存在能够同时检测扭转力、径向力和拉力等复合力的结构。
技术实现要素:
6.本发明目的是提供一种同轴串联三维机械自解耦力传感器,其解决了上述技术问题中的至少一个。
7.本发明解决技术问题采用如下技术方案:一种同轴串联三维机械自解耦力传感器,其包括:传感器承力板、扭矩限位顶板、扭矩应变件、扭矩限位销、径向力传递盘、扭矩限位板、第一径向力应变件、第二径向力应变件、滚针轴承、径向力支撑筒、径向力限位板、轴向力支撑筒、轴向力限位上件、轴向力应变件和轴向力限位下件;
8.所述传感器承力板下部形成为截面为长方形的棱柱,并且在棱柱的两个相对的侧面中的每个侧面开设有四个滚珠凹槽,四个滚珠凹槽分别位于一个正方形的四个顶点,并使得两个滚珠凹槽位于同一水平直线,两个滚珠凹槽位于同一竖直直线;所述滚珠凹槽内设置有滚珠;
9.所述传感器承力板的棱柱的下端沿其轴向形成有中心沉孔,所述径向力传递盘的上端设置于所述中心沉孔内;并且所述传感器承力板的下端还开设有销孔,所述销孔与所述传感器承力板的轴线垂直相交,所述扭矩限位销被安装于所述销孔内,并且扭矩限位销的中部穿过所述径向力传递盘的上端,以将径向力传递盘和传感器承力板相固定;
10.所述扭矩应变件包括中心部以及设置于所述中心部的两个翅片部,所述翅片部沿所述扭矩应变件的径向延伸;所述中心部的中间形成有矩形通孔;所述传感器承力板的下端可滑动地设置于所述矩形通孔内,并且所述传感器承力板的周边的滚珠与扭矩应变件的
矩形通孔的内部存在间隙;所述翅片部的一端固定于所述中心部,所述翅片部的另一端浮动设置;所述翅片部的高度大于其厚度,所述翅片部的另一端的上表面形成有一个滚珠凹槽,所述翅片部的另一端的下表面形成有一个滚珠凹槽,所述翅片部的另一端的厚度方向的两个表面均形成有两个滚珠凹槽,所述翅片部的滚珠凹槽内均设置有滚珠;所述翅片部的厚度方向的表面上粘结磁致伸缩材料;
11.所述扭矩限位板的上表面的设置有两组楔形块,每组楔形块包括两个楔形块;所述扭矩限位顶板固定于所述楔形块的上端;所述扭矩限位板的上表面、楔形块的内表面和所述扭矩限位顶板下表面形成一容纳空间,所述扭矩应变件的翅片部的另一端设置于该容纳空间;
12.所述扭矩限位板的中心形成有中心孔,所述径向力传递盘的上端形成为上部阶梯轴,该阶梯轴的外径与所述扭矩限位板的中心孔之间存在间隙,所述上部阶梯轴安装于所述传感器承力板的中心沉孔内;所述径向力传递盘的下端形成为圆盘,所述圆盘的上表面和下表面均形成有滚珠凹槽,该滚珠凹槽以所述径向力传递盘的轴心线为中心的圆均匀分布;所述滚珠凹槽内放置有钢珠;
13.所述径向力支撑筒的上端固定于所述扭矩限位板的下表面,所述径向力支撑筒的下端固定于所述径向力限位板的上表面,所述轴向力支撑筒的上端固定于所述径向力限位板的下表面,所述轴向力支撑筒的下端固定于所述轴向力限位上件的上表面;
14.所述径向力传递盘的外周面设置有滚针轴承;所述第一径向力应变件、所述第二径向力应变件和所述滚针轴承均设置在所述扭矩限位板与所述径向力限位板之间;所述第一径向力应变件和第二径向力应变件的结构相同,并叠摞设置;所述第一径向力应变件设置于所述第二径向力应变件的上方,在第一径向力应变件和第二径向力应变件之间设置有磁致伸缩材料;所述第一径向力应变件和所述第二径向力应变件内圆周面存在环形凸肩,用于固定所述滚针轴承;
15.所述轴向力限位上件的下部呈四棱柱状,在所述轴向力限位上件的下部的每个表面上均开设有8个滚珠凹槽,该8个滚珠凹槽呈两列四行分布;
16.所述轴向力限位下件上部为圆柱状,沿其轴向开设有正方形的中心通孔,该正方形的中心通孔的表面开设有8条弧形凹槽,该弧形凹槽的横截面呈弧形,并且在竖直方向上延伸;
17.所述轴向力应变件的上端连接于所述轴向力限位上件的下表面,所述轴向力应变件的下端连接于所述轴向力限位下件的上表面,所述轴向力限位上件可滑动地设置于所述轴向力限位下件的正方形孔内,并且轴向力限位上件的滚珠凹槽内所放置的滚珠的部分位于所述弧形凹槽内;所述轴向力应变件的中部设置有磁致伸缩材料。
18.可选的,所述径向力传递盘的上端开设用于扭矩限位销穿过的径向通孔。
19.可选的,所述滚珠凹槽为半球形槽,并能够容纳所述滚珠的一半;所述滚珠的另一半位于滚珠凹槽的外部。
20.可选的,所述传感器承力板为同轴串联三维机械自解耦力传感器的输入端。
附图说明
21.图1是本发明的同轴串联三维机械自解耦力传感器的立体结构示意图。
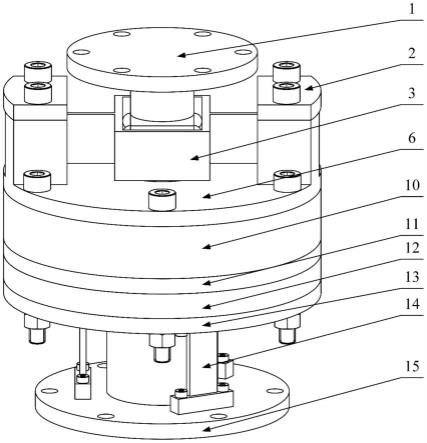
22.图2是本发明的同轴串联三维机械自解耦力传感器的立体结构剖视图。
23.图3是本发明的同轴串联三维机械自解耦力传感器的立体结构零件拆解图。
24.图4是本发明的同轴串联三维机械自解耦力传感器的扭转力受力检测区的立体结构剖视图。
25.图5是本发明的同轴串联三维机械自解耦力传感器的扭转力受力检测区的立体结构零件拆解图。
26.图6是本发明的同轴串联三维机械自解耦力传感器的径向力受力检测区的立体结构剖视图。
27.图7是本发明的同轴串联三维机械自解耦力传感器的径向力受力检测区的立体结构零件拆解图。
28.图8是本发明的同轴串联三维机械自解耦力传感器的轴向力受力检测区的立体结构剖视图。
29.图9是本发明的同轴串联三维机械自解耦力传感器的轴向力受力检测区的立体结构零件拆解图。
30.图中标记示意为:1-传感器承力板;2-扭矩限位顶板;3-扭矩应变件;4-扭矩限位销;5-径向力传递盘;6-扭矩限位板;7-第一径向力应变件;8-第二径向力应变件;9-滚针轴承;10-径向力支撑筒;11-径向力限位板;12-轴向力支撑筒;13-轴向力限位上件;14-轴向力应变件;15-轴向力限位下件。
具体实施方式
31.下面结合实施例及附图对本发明的技术方案作进一步阐述。
32.实施例1
33.本实施例提供了一种同轴串联三维机械自解耦力传感器,包括:传感器承力板1、扭矩限位顶板2、扭矩应变件3、扭矩限位销4、径向力传递盘5、扭矩限位板6、第一径向力应变件7、第二径向力应变件8、滚针轴承9、径向力支撑筒10、径向力限位板11、轴向力支撑筒12、轴向力限位上件13、轴向力应变件14和轴向力限位下件15等结构。
34.所述传感器承力板1为同轴串联三维机械自解耦力传感器的输入端,承受轴向力、径向力和扭转力;所述传感器承力板1上部开设有以轴心线为中心呈60
°
分布的6个通孔;所述传感器承力板1下部形成为截面为长方形的棱柱,并且在棱柱的两个相对的侧面中的每个侧面开设有四个滚珠凹槽,四个滚珠凹槽分别位于一个正方形的四个顶点,并使得两个滚珠凹槽位于同一水平直线,两个滚珠凹槽位于同一竖直直线。
35.所述传感器承力板1的棱柱的下端沿其轴向形成有中心沉孔,所述径向力传递盘5的上端设置于所述中心沉孔内;并且所述传感器承力板1的下端还开设有销孔,所述销孔与所述传感器承力板1的轴线垂直相交,扭矩限位销4被安装于所述销孔内,并且扭矩限位销4的中部穿过所述径向力传递盘5的上端,以将径向力传递盘5和传感器承力板1相固定,此时所述径向力传递盘5的上端可以开设用于扭矩限位销4穿过的径向通孔。
36.所述滚珠凹槽内设置有滚珠,在一个实施例中,所述滚珠凹槽为半球形槽,并能够容纳所述滚珠的一半;所述滚珠的另一半位于所述传感器承力板1的外部。
37.所述扭矩应变件3包括中心部以及设置于所述中心部的两个翅片部,所述翅片部
沿所述扭矩应变件3的径向延伸;所述中心部的中间形成有矩形通孔;所述传感器承力板1的下端可滑动地设置于所述矩形通孔内,并且所述传感器承力板1的周边的滚珠与扭矩应变件3的矩形通孔的内部存在间隙,该间隙能够使得传感器承力板1能够在矩形通孔内沿径向运动,并且当传感器承力板1转动时,能够带动扭矩应变件3的中心部发生转动。
38.所述翅片部的一端固定于所述中心部,所述翅片部的另一端浮动设置;在一个实施例中,所述翅片部的竖直方向的尺寸(高度)大于其厚度,也就是说,所述翅片部的厚度较薄。所述翅片部的另一端的上表面(高度方向的一个表面)形成有一个滚珠凹槽,所述翅片部的另一端的下表面(高度方向的另一个表面)形成有一个滚珠凹槽,所述翅片部的另一端的厚度方向的两个表面均形成有两个滚珠凹槽,在这些滚珠凹槽内均设置有滚珠。本实施例的滚珠凹槽的结构均相同,在此不再一一详述其结构。
39.所述翅片部的厚度方向的表面上粘结磁致伸缩材料,从而通过检测磁致伸缩材料的变形来检测同轴串联三维机械自解耦力传感器所承受的扭矩。
40.所述扭矩限位板6的上表面的设置有两组楔形块,每组楔形块包括两个楔形块;每个楔形块的上表面开设有螺纹孔,所述螺纹孔的数量可以为2个。所述扭矩限位顶板2固定于所述楔形块的上端,例如,通过螺钉固定于所述楔形块的上端,从而所述扭矩限位板6的上表面、楔形块的内表面和所述扭矩限位顶板2下表面形成一容纳空间,所述扭矩应变件3的翅片部的另一端设置于该容纳空间,此时,所述扭矩应变件3周边的滚珠分别与所述扭矩限位板6的上表面、楔形块的内表面和所述扭矩限位顶板2的下表面接触,以使得所述扭矩限位板6的上表面和楔形块的内表面和所述扭矩限位顶板2下表面共同约束所述扭矩应变件3的自由度。
41.由此,所述扭矩限位顶板2通过螺栓固定到所述扭矩限位板6楔形块上;所述扭矩应变件3在所述扭矩限位顶板2与所述扭矩限位板6之间,通过滚珠接触配合;所述扭矩应变件3与所述传感器承力板1下部通过滚珠接触配合。
42.所述传感器承力板1的棱柱与扭矩应变件3的矩形通孔之间的距离(间隙)可以大于所述径向力传递盘的上端与所述扭矩限位板6之间的距离(间隙)。所述楔形块的尺寸被设计为,当扭矩应变件3的另一端动作时,不会从楔形块所形成的空间中脱离。
43.本实施例中,所述扭矩限位板6的中心形成有中心孔,并且所述扭矩限位板6上还设置有6个通孔,该6个通孔以所述扭矩限位板6的轴心线为中心均匀分布。
44.所述径向力支撑筒10的上端固定于所述扭矩限位板6的下表面,所述径向力支撑筒10的下端固定于所述径向力限位板11的上表面,所述轴向力支撑筒12的上端固定于所述径向力限位板11的下表面,所述轴向力支撑筒12的下端固定于所述轴向力限位上件13的上表面。
45.在一个实施例中,可以使用螺栓依次穿过所述扭矩限位板6、所述径向力支撑筒10、所述径向力限位板11、所述轴向力支撑筒12和所述轴向力限位上件13,将所述扭矩限位板6、所述径向力支撑筒10、所述径向力限位板11、所述轴向力支撑筒12和所述轴向力限位上件13固定在一起。
46.所述径向力传递盘5的上端形成为上部阶梯轴,该阶梯轴的外径与所述扭矩限位板6的内径(中心孔的表面)之间存在间隙,从而能够使得径向力传递盘5能够沿其径向运动。该上部阶梯轴可以安装于所述传感器承力板1的中心沉孔内;所述径向力传递盘的下端
形成为圆盘,所述圆盘的上表面和下表面均形成有滚珠凹槽,该滚珠凹槽以所述径向力传递盘5的轴心线为中心的圆均匀分布。其中,所述圆盘的上表面和下表面所形成的滚珠凹槽的数量均为6个。所述滚珠凹槽内放置有钢珠(滚珠)。
47.由此,所述径向力传递盘5与所述扭矩限位板6、所述径向力限位板11通过滚珠接触配合。
48.所述径向力传递盘5的外周面设置有滚针轴承9,其中,所述径向力传递盘5与所述滚针轴承9为过渡配合。
49.所述第一径向力应变件7、所述第二径向力应变件8、所述滚针轴承9放置在所述扭矩限位板6与所述径向力限位板11之间;所述第一径向力应变件7和第二径向力应变件8的结构相同,并叠摞设置。在一个实施例中,所述第一径向力应变件7设置于所述第二径向力应变件8的上方,同时在第一径向力应变件7和第二径向力应变件8之间设置有磁致伸缩材料,以当第一径向力应变件7和第二径向力应变件8产生形变时,能够使得磁致伸缩材料发生变形,并由此能够检测同轴串联三维机械自解耦力传感器的径向力。
50.具体地,所述第一径向力应变件7和所述第二径向力应变件8均开设有多个横截面为椭圆形通孔,以使得第一径向力应变件7和第二径向力应变件8能够容易地发生变形。在一个优选的实施例中,所述椭圆形通孔的数量可以为95个。
51.所述第一径向力应变件7和所述第二径向力应变件8内圆周面存在环形凸肩,用于固定所述滚针轴承9;所述第一径向力应变件7和所述第二径向力应变件8与所述扭矩限位板6、所述径向力限位板11、所述径向力支撑筒10为接触配合。
52.所述轴向力限位上件13上表面开设有以轴心线为中心呈60
°
分布的6个圆形通孔和三组呈120
°
分布的圆形通孔,每组圆形通孔包括2个圆形通孔;所述轴向力限位上件13的下部呈四棱柱状,在所述轴向力限位上件13的下部的每个表面上均开设有8个滚珠凹槽,该8个滚珠凹槽呈两列四行分布。
53.所述轴向力限位下件15开设有以轴心线为中心呈60
°
分布的6个圆形通孔和三组呈120
°
分布的圆形通孔,每组圆形通孔包括2个圆形通孔。所述轴向力限位下件15上部为圆柱状,沿其轴向开设有正方形的中心通孔,该正方形的中心通孔的表面开设有8条弧形凹槽,该弧形凹槽的横截面(水平平面)呈弧形,并且在竖直方向上延伸。
54.所述轴向力应变件14的上端连接于所述轴向力限位上件13的下表面,所述轴向力应变件14的下端连接于所述轴向力限位下件15的上表面,以当轴向力限位上件13相对于轴向力限位下件15滑动,即产生上下运动时,能够使得轴向力应变件14产生形变。此时,所述轴向力应变件14的中部设置有磁致伸缩材料,从而能够检测同轴串联三维机械自解耦力传感器所承受的拉压力(轴向力)。
55.也就是说,所述轴向力限位上件13、所述轴向力应变件14和所述轴向力限位下件15通过螺栓连接配合;所述轴向力限位上件13与所述轴向力限位下件15通过滚珠接触配合;所述轴向力应变件14两端通过螺栓与所述轴向力限位上件13和所述轴向力限位下件15固定连接。
56.由此,当本实施例的同轴串联三维机械自解耦力传感器在使用时,可以将上端的所述传感器承力板1,以及下端的所述轴向力限位下件15固定于待测件,由此,也就是说,所述传感器承力板1为所述同轴串联三维机械自解耦力传感器的轴向力、径向力以及扭转力
的输入端。
57.当所述同轴串联三维机械自解耦力传感器受到耦合力时,扭转力作用在所述传感器承力板1上,所述传感器承力板1与所述扭矩应变件3通过滚珠接触连接,由于所述扭矩限位板6的上表面和楔形块的内表面、所述扭矩限位顶板2下表面共同约束所述扭矩应变件3的自由度,因此所述扭矩应变件3只发生平面扭转形变。
58.由于所述传感器承力板1的棱柱与扭矩应变件3的矩形通孔之间的距离(间隙)可以大于所述径向力传递盘的上端与所述扭矩限位板6之间的距离(间隙),所述楔形块的尺寸被设计为,当扭矩应变件3的另一端动作时,不会从楔形块所形成的空间中脱离,所以所述扭矩应变件3发生扭转形变时,不受径向力的影响。
59.由于所述传感器承力板1与所述径向力传递盘5通过所述扭矩限位销4固定连接,所述径向力传递盘5与所述扭矩限位板6、所述径向力限位板11通过滚珠接触配合,所以所述扭矩应变件3发生扭转形变时,不受轴向力的影响。本实施方案所述的受力应变区域可结合图1、图2、图3、图4和图5,可见所受扭转力并未对径向力以及轴向力的受力形变区域产生影响,即所述第一径向力应变件7和第二径向力应变件8以及所述轴向力应变件14本身未发生形变。
60.当所述同轴串联三维机械自解耦力传感器受到耦合力时,径向力作用在所述传感器承力板1上,由于所述传感器承力板1与所述径向力传递盘5通过所述扭矩限位销4固定连接,所述径向力传递盘5与所述滚针轴承9为过渡配合,所述第一径向力应变件7和所述第二径向力应变件8与所述扭矩限位板6、所述径向力限位板11、所述径向力支撑筒10为接触配合,所以所述第一径向力应变件7和第二径向力应变件8只发生径向的位移形变。由于使用螺栓依次穿过所述扭矩限位板6、所述径向力支撑筒10、所述径向力限位板11、所述轴向力支撑筒12和所述轴向力限位上件13固定连接,所述径向力传递盘5与所述扭矩限位板6、所述径向力限位板11通过滚珠接触配合,所述第一径向力应变件和所述第二径向力应变件内圈存在环形凸肩,固定有所述滚针轴承,所以所述第一径向力应变件7和第二径向力应变件8发生径向位移形变,不受轴向力和扭转力的影响。本实施方案所述的受力位移区域可结合图1、图2、图3、图6和图7,可见所受径向力并未对轴向力以及扭转力的受力形变区域产生影响,即所述扭矩应变件3以及所述轴向力应变件14本身未发生形变。
61.当所述同轴串联三维机械自解耦力传感器受到耦合力时,轴向力作用在所述传感器承力板1上,由于所述传感器承力板1与所述径向力传递盘5通过所述扭矩限位销4固定连接,使用螺栓依次穿过所述扭矩限位板6、所述径向力支撑筒10、所述径向力限位板11、所述轴向力支撑筒12和所述轴向力限位上件13进行固定连接,所述轴向力限位上件13下部为长方体,并且与所述轴向力限位下件15上部正方形通孔通过滚珠接触配合,所以所述轴向力应变件14发生轴向位移形变,不受径向力和扭转力的影响。本实施方案所述的受力位移区域可结合图1、图2、图3、图8和图9,可见所受轴向力并未对经向力以及扭转力的受力形变区域产生影响,即所述扭矩应变件3以及所述第一径向力应变件7和第二径向力应变件8本身未发生形变。
62.所述传感器承力板1受到轴向力、径向力和扭转力,分别使所述轴向力应变件14、所述径向力应变件7和8和所述扭矩应变件3发生相应的形变,所述轴向力应变件14的形变区域表面粘贴有磁致伸缩材料,所述第一径向力应变件7和第二径向力应变件8中间粘贴有
磁致伸缩材料,所述扭矩应变件3的形变区域表面粘贴有磁致伸缩材料。当所述轴向力应变件14、所述第一径向力应变件7和第二径向力应变件8和所述扭矩应变件3发生相应的形变时,磁致伸缩材料产生应力,在施加的激励磁场的作用下产生磁致伸缩逆效应,通过检测线圈检测其磁场变化,即可以同时实现对耦合力进行结构解耦,以及对轴向应力、扭转应力和径向应力的联合检测。而且不需要连入供电线路或通过有线接口采集数据;应用在智能制造、生物以及医学领域,可大大减少传感器输出数据时需要繁多的有线传输的问题,也大大促进了信息传递的简易性。
63.以上实施例的先后顺序仅为便于描述,不代表实施例的优劣。
64.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。