一种髋关节镜手术的ar导航系统及方法
技术领域
1.本发明涉及ar领域,具体涉及一种髋关节镜手术的ar导航系统及方法。
背景技术:
2.目前的髋关节镜手术中存在的技术难点集中在三个方面,第一,髋关节入路建立困难。在牵引使得髋关节间隙达到8-10mm后,外科医生首先需要将穿刺针刺入髋关节以建立髋关节镜第一个外侧观察入路时,但是由于髋关节位置深,无法像身体其他大关节一样通过简单体表标记定位而将穿刺针准确刺入;而且髋关节周围血管神经丰富,缺乏经验的医生有可能因为误穿刺造成损伤。另外,更加困难的是建立髋关节镜手术的工作入路,手术医生将关节镜通过第一个入路置入关节后,因为深在的髋关节间隙,想准确地将穿刺针通过另外一个体表位置刺入关节内的关节镜视野下非常困难,往往是髋关节镜手术中最主要的限速步骤。第二,术中定位困难。由于髋关节属于杵臼关节,环形的髋臼缘和球形的股骨头,在关节镜下常缺乏明显的定位标志,术中在镜下对于解剖结构的准确空间定位较为困难;第三,手术范围难以精确把控。例如髋关节镜下最常见的股髋撞击症手术,需要对相应的骨赘在镜下进行磨除,因此,临床上常常通过三维ct图像的分析来判定骨赘的范围;然而,三维ct图像上的骨赘边界,无法与镜下视野进行精确的拟合,即使开放手术也无法完成。而骨赘的切除不完全或过度切除,是股髋撞击症术后疗效不佳的最主要因素,也是相关手术中的常见操作偏差。因而,很多医生需要在手术当中通过各种体位的x线c臂机透视反复确认。如何将三维ct影像学分析的结果实时地指导关节镜下手术的操作,是临床应用的难点。上述髋关节手术中的定位困难、反复术中x线透视等因素,延长了手术时间、给医患双方带来辐射损害,同时造成了手术难度。
技术实现要素:
3.本发明的目的是提供一种能够根据三维ct影像学分析的结果实时地指导关节镜下手术操作的系统及方法。
4.为了达到上述目的,本发明提供了一种髋关节镜手术的ar导航系统,包括:
5.三维建模模块,通过第一扫描装置获取患者术前髋关节ct扫描数据,生成髋关节虚拟三维模型;根据球形拟合技术,标记股骨头球面,勾勒出凸出于球面的股骨头颈处的“凸轮畸形”;
6.规划模块,接收所述虚拟三维模型,识别骨赘,在所述虚拟三维模型上形成规划手术操作过程,将所述规划手术操作过程发送至配准模块;
7.配准模块,通过第二扫描装置在术中拍摄的x光图像,识别所述x光图像的特征点,与包含所述规划手术操作过程的虚拟三维模型在同一坐标系下配准,形成三维导航图像;
8.ar眼镜,接收并显示所述三维导航图像。
9.可选地,根据ct扫描数据,通过高斯算法,对股骨头进行球形拟合,包括:
10.将图像转化为单通道的灰度图像;选取尺度空间因子σ,使用不同尺度的空间因子
k*σ的高斯算子分别对图像进行平滑操作,k的范围是1.0-5.0;
11.g1(x,y)=g
σ1
(x,y)
×
i(x,y)
12.g2(x,y)=g
σ2
(x,y)
×
i(x,y)
13.dog=g
σ1-g
σ2
14.则高斯平滑后差分图像为:
15.g1(x,y)-g2(x,y)=
×gσ1-g
σ2
)
×
i(x,y)=dog
×
i(x,y)
16.计算不同尺度空间因子下高斯平滑图像的差分图像,并进行形态学处理;假设对图像i(x,y),使用尺度为σ的高斯平滑:
[0017][0018]
使用opencv中的findcontours函数以及圆的特征,处理上述图像,获得图像中的圆。
[0019]
可选地,所述第二扫描装置包括c臂机,使用所述c臂机配合定位标靶块进行拍摄,获取所述x光图像,将所述虚拟三维模型与术中x光图像中的体位改变进行配准。
[0020]
可选地,包括:标定模块,通过光学定位追踪设备识别手术器械,选取对应的手术器械完成注册。
[0021]
可选地,包括:监控模块,所述监控模块通过光学定位追踪设备监控实际手术操作过程,当手术过程异常时发出预警信号。
[0022]
可选地,所述监控模块获取所述配准模块的三维导航图像,当实际手术操作过程偏离所述三维导航图像中的规划手术操作过程,所述监控模块发出预警信号。
[0023]
可选地,所述监控模块无法确认关节镜当前位置,或所述光学追踪设备被遮挡,或手术器械上的反光小球被遮挡时,所述监控模块发出预警信号。
[0024]
可选地,包括:信号模块,所述信号模块向所述ar眼镜发送实时信息。
[0025]
本发明还提供了一种髋关节镜手术的ar导航方法,使用上述髋关节镜手术的ar导航系统,包括:
[0026]
所述第一扫描装置获取患者术前髋关节ct扫描数据,所述三维建模模块根据所述术前ct扫描数据生成虚拟三维模型,将所述虚拟三维模型发送至规划模块;根据球形拟合技术,标记股骨头球面,勾勒出凸出于球面的股骨头颈处的“凸轮畸形”;
[0027]
所述规划模块接收所述虚拟三维模型,识别骨赘,在所述虚拟三维模型上形成规划手术操作过程,将所述规划手术操作过程发送至配准模块;
[0028]
所述配准模块通过第二扫描装置在术中拍摄的x光图像,识别所述x光图像的特征点,与包含所述规划手术操作过程的虚拟三维模型在同一坐标系下配准,形成三维导航图像;
[0029]
所述ar眼镜,接收并显示所述三维导航图像。
[0030]
可选地,根据ct扫描数据,通过高斯算法,对股骨头进行球形拟合,包括:
[0031]
将图像转化为单通道的灰度图像;选取尺度空间因子σ,使用不同尺度空间因子σ和k*σ的高斯算子分别对图像进行平滑操作;
[0032]
定义dog算子:定义dog算子:
[0033]
g1(x,y)=g
σ1
(x,y)
×
i(x,y)
[0034]
g2(x,y)=g
σ2
(x,y)
×
i(x,y)
[0035]
dog=g
σ1-g
σ2
[0036]
则高斯平滑后差分图像为:
[0037]
g1(x,y)-g2(x,y)=(g
σ1-g
σ2
)
×
i(x,y)=dog
×
i(x,y)
[0038]
计算不同尺度空间因子下高斯平滑图像的差分图像,并进行形态学处理;假设对图像i(x,y),使用尺度为σ的高斯平滑:
[0039][0040]
使用opencv中的findcontours函数以及圆的特征,处理上述图像,获得图像中的圆。
[0041]
本发明的有益效果为:
[0042]
(1)通过本发明的髋关节镜手术的ar导航系统建立髋关节手术入路,使手术操作更加准确,提高手术成功率。
[0043]
(2)以股骨头球面为术中定位标志,将骨赘边界与镜下视野进行拟合,避免骨赘的切除不完全或过度切除,精确把控手术范围。
附图说明
[0044]
图1为本发明的导航系统将ct图像转化的单通道灰度图像。
[0045]
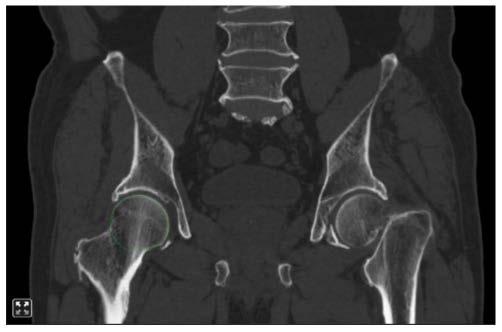
图2为本发明的导航系统定位的股骨头球面图像。
[0046]
图3为本发明通过虚拟三维模型识别骨赘的示意图。
[0047]
图4为本发明通过虚拟三维模型识别骨赘的另一示意图。
具体实施方式
[0048]
下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0049]
在本发明的描述中,需要说明的是,术语“上”“下”“左”“右”“垂直”“水平”“内”“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”“第二”“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0050]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”“相连”“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0051]
本发明提供了一种髋关节镜手术治疗股骨头颈处凸轮型(cam型)撞击症的ar导航系统及方法,包括:三维建模模块、规划模块、标定模块、配准模块、监控模块、信号模块和ar眼镜。
[0052]
三维建模模块用于对ct数据进行虚拟三维建模。三维建模模块通过第一扫描装置,例如ct设备,扫描后获得患者的ct数据,例如,该ct数据可以是ct图像;根据所述术前ct数据生成虚拟三维模型,将所述虚拟三维模型发送至规划模块;根据ct扫描数据,通过高斯算法,利用球形拟合技术,对股骨头进行球形拟合,标记股骨头球面,勾勒出凸出于球面的股骨头颈处的“凸轮畸形”。
[0053]
规划模块用于术前规划手术入路及操作。规划模块接收所述虚拟三维模型;识别髋臼唇及月状面是否存在影响股骨头球体转动的骨赘,在所述虚拟三维模型上形成规划手术操作过程,该规划手术操作过程包括在虚拟三维模型中显示用于指示手术路径方向箭头等,将所述规划手术操作过程发送至配准模块。
[0054]
标定模块用于对手术器械的识别及注册。标定模块通过光学定位追踪设备识别手术器械,选取对应的手术器械完成注册。具体地,手术器械的关键点上以一定方式紧密附着用于追踪定位的反光小球,手术前,通过光学定位追踪设备识别反光小球,注册对应的手术器械,同时获取反光小球与手术器械的相对空间关系。若反光小球附着在手术器械关键点上的位置发生变化,则对该手术器械重新识别注册。
[0055]
配准模块用于将术前的ct虚拟三维模型与术中x光图像术中体位改变进行配准。配准模块通过第二扫描装置,例如c臂机,使用所述c臂机配合定位标靶块(拍摄x光图像时置入成像区域的模块工装)进行拍摄,在术中拍摄x光图像,识别所述x光图像的特征点,将术中x光图像中的体位改变与包含所述规划手术操作过程的虚拟三维模型在同一坐标系下配准,形成三维导航图像。
[0056]
监控模块用于术中的实时位置监控及预警。所述监控模块通过光学定位追踪设备监控实际手术操作过程,当手术过程异常时发出预警信号。具体地,光学定位追踪设备通过识别已注册的手术器械上的反光小球,获取手术进行情况。监控模块运行期间,光学追踪设备将以每秒60次左右的频率发射特有频段的红外光,红外光经反光小球反射后,计算小球的实时位置,再依据标定注册过程得到的反光小球与手术器械的相对空间位置关系,定位到手术器械关键点的坐标。
[0057]
当出现如下几种情况时,认为手术过程异常,监控模块发出预警信号:
[0058]
情况1:所述监控模块获取所述配准模块的三维导航图像,当实际手术操作过程偏离所述三维导航图像中的规划手术操作过程,所述监控模块发出预警信号;
[0059]
情况2:所述监控模块无法确认关节镜当前位置时,发出预警信号;
[0060]
情况3:所述光学追踪设备被遮挡,或手术器械上的反光小球被遮挡时,光学追踪设备无法计算反光小球的实时定位信息,所述监控模块发出预警信号。
[0061]
信号模块用于对ar眼镜发送实时信息,至少包括最新的手术规划数据、反光小球的实时坐标信息等。监控模块发出的预警信号也在ar眼镜中显示。可选地,信号模块为本发明的ar导航系统提供无线网络信号。
[0062]
ar眼镜用于接收并显示所述三维导航图像。本发明还包括主机和显示器。主机与光学追踪设备有线连接,能够将光学追踪设备获得的信息传送至主机中。可选地,ar导航系统所生成的各种信息,包括但不限于规划手术操作过程、三维导航图像、实际手术操作过程和预警信号等,均能发送至主机中,经主机带有的主体软件处理,显示在显示器上。主机接收的各种信息,通过信号模块发送至ar眼镜,经ar眼镜带有的独立微型计算平台计算后,将
最新的手术规划数据、反光小球的实时坐标信息等信息显示在ar眼镜中,以便术者观看。即,主机和ar眼镜通过网络通讯方式共享数据,二者能够各自独立使用数据,并在其对应的显示设备上显示相应内容。
[0063]
基于上述髋关节镜手术的ar导航系统,本发明提供了一种髋关节镜手术的ar导航方法,包括如下步骤:
[0064]
步骤一:通过网络或u盘在术前将ct设备获得的ct图像传送至三维建模模块。
[0065]
步骤二:三维建模模块对多张ct图像进行渲染,使用高斯算法计算出股骨头球面,并生成虚拟三维模型。其中,高斯差分算子的股骨头球面识别算法的步骤为:
[0066]
步骤(1),将ct图像转化为如图1所示的单通道的灰度图像;
[0067]
步骤(2),选取尺度空间因子σ,使用不同尺度空间因子k*σ的高斯算子分别对图像进行平滑操作;其中,k为常数,k的取值范围为1.0-5.0,可根据不同特征图像及想要到达的模糊程度,选取若干不同尺度的空间因子。
[0068]
定义dog算子:
[0069]
g1(x,y)=g
σ1
(x,y)
×
i(x,y)
[0070]
g2(x,y)=g
σ2
(x,y)
×
i(x,y)
[0071]
dog=g
σ1-g
σ2
[0072]
则高斯平滑后差分图像为:
[0073]
g1(x,y)-g2(x,y)=(g
σ1-g
σ2
)
×
i(x,y)=dog
×
i(x,y)
[0074]
步骤(3),计算不同尺度空间因子下高斯平滑图像的差分图像,并进行形态学处理;假设对图像i(x,y),使用尺度为σ的高斯平滑:
[0075][0076]
步骤(4),使用opencv中的findcontours函数以及圆的特征,处理步骤(3)中得到的图像,获得如图2所示的的股骨头球面。
[0077]
步骤三:所述规划模块接收所述虚拟三维模型,如图3和图4所示,通过虚拟三维模型识别髋臼唇及月状面是否存在影响股骨头球体转动的骨赘,对病灶进行涂色标记,模拟手术过程,在所述虚拟三维模型上形成规划手术操作过程。
[0078]
步骤四:通过光学定位追踪设备识别手术器械上的反光小球,并在导航系统中选取相对应的手术器械完成注册;需要注意的是,髋关节镜是在一个水环境下进行的,需要对手术器械上的反光小球进行防水处理,避免反光小球遇水无法被光学定位追踪设备所识别。
[0079]
步骤五:将所述规划手术操作过程发送至配准模块,使用所述c臂机配合定位标靶块进行拍摄,在术中拍摄x光图像,识别所述x光图像的特征点,将术中x光图像中的体位改变与包含所述规划手术操作过程的虚拟三维模型在同一坐标系下配准,形成三维导航图像。
[0080]
步骤六:患者仰卧于骨科牵引床,会阴部抵在直径20-30mm的会阴柱上。双侧足踝区包裹保护后固定于牵引床的足踝部件上。双侧牵引至双下肢伸直、外展45度,并有一定张力后,通过牵引床的牵引装置重点牵拉手术侧下肢,并通过术中x光机拍摄,通过x光图像观察髋臼与股骨头之间的间隙是否达到8-10mm的要求。根据导航规划,医生在位于股骨大转
子上部前缘的最高点做切口,将安装有反光小球的穿刺针按规划路径刺入关节间隙。取出穿刺针内芯后,将长导丝插入穿刺针鞘直至关节;再沿长导丝置入关节镜鞘后,接上安装有反光小球的关节镜即可进行髋关节镜的初步观察。移动关节镜镜头观察到髋臼前上盂唇、股骨头构成的三角间隙处的前方关节囊。
[0081]
步骤七:根据导航系统形成的规划手术操作过程,将穿刺针位于大腿上端安全区域向髋关节间隙内刺入,以保证穿刺针的尖端进入关节镜视野,然后依次置入导丝、镜鞘等完成工作入路的建立。
[0082]
步骤八:通过光学定位追踪设备对手术过程进行实时监控,同时通过显示器显示手术路径以及方向箭头,当关节镜偏离规划路径或医生操作失误时,系统将发出预警信号。至少在以下几种情况时,发出预警信号:
[0083]
情况1,实际手术操作过程中,手术入路偏离规划手术操作过程预先建立的入路路径;
[0084]
情况2,当关节镜进入关节后,因关节中的特殊环境,无法确认关节镜当前位置;
[0085]
情况3,遮挡光学定位追踪设备或反光小球。
[0086]
步骤九:通过信号模块将步骤一至步骤五中传输至头戴式ar眼镜中,实现可视化。
[0087]
综上所述,本发明公开了一种髋关节镜手术的ar导航系统,包括:三包括:三维建模模块、规划模块、标定模块、配准模块、监控模块、信号模块和ar眼镜等。通过本发明的髋关节镜手术的ar导航系统建立髋关节手术入路,使手术操作更加准确,提高手术成功率。以股骨头球面为术中定位标志,将骨赘边界与镜下视野进行拟合,避免骨赘的切除不完全或过度切除,精确把控手术范围。
[0088]
尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。