1.本发明涉及一种钓鱼用渔线轮的显示控制装置、具有该显示控制装置的钓鱼用渔线轮、显示控制方法以及显示控制程序。
背景技术:
2.已知一种钓鱼用渔线轮,其通过进行驱动控制以使卷线筒按照所设定的参数进行规定的一系列动作,来进行按照使用者意图的自动诱鱼动作(例如,参照专利文献1)。[现有技术文献][专利文献]
[0003]
专利文献1:日本发明专利公开公报特开2020-146025号
技术实现要素:
[发明要解决的技术问题]
[0004]
使用者有时希望能以数值的方式来准确掌握使卷线筒进行某一系列动作所产生的渔线的卷取距离(卷取长度)。
[0005]
本发明是鉴于这样的情况而作出的,其目的在于,实现能够以数值的方式来准确掌握使卷线筒进行一系列动作所产生的渔线的卷取(绕线)距离。[用于解决技术问题的技术方案]
[0006]
用于解决上述技术问题的本发明的一技术方案为一种钓鱼用渔线轮的显示控制装置,具有计算部和显示控制部,其中,所述计算部根据基于旋转方向赋予卷线筒的规定的一系列动作从开始到结束为止的卷线筒的旋转状态来计算由进行所述一系列动作的所述卷线筒卷取渔线的卷取距离,其中所述旋转方向是指与渔线的卷取对应的方向,所述显示控制部进行控制,以使显示部进行基于所述计算部计算出的卷取距离的显示。根据上述结构,使用者能以数值的方式来准确掌握例如响应于抽动等使卷线筒进行规定的一系列动作而相应地随着渔线被卷取而进行变化的终端钓具(terminal tackle)的水深的差值。
[0007]
另外,本发明的一技术方案可以为:在上述的显示控制装置的基础上,所述显示控制部根据所述计算部对应于所述一系列动作结束时而计算出的卷取距离,在所述显示部中显示从所述一系列动作开始时起到所述一系列动作结束时为止所对应的终端钓具位置的水深的差值。根据上述结构,能够在卷线筒完成规定的一系列动作的阶段,显示在该一系列动作之前和之后的终端钓具位置的水深的差值。即,能够在对于使用者来说适当的时刻向,使用者提示终端钓具位置的水深的差值。
[0008]
另外,本发明的一技术方案可以为:在上述的显示控制装置的基础上,所述显示控制部在进行所述一系列动作的期间进行控制,以使所述显示部进行基于所述计算部计算出的卷取距离的显示。
根据上述结构,在卷线筒响应于一系列动作而进行旋转的状态下,能够响应于渔线被卷取而一边使水深的差值变化一边进行显示。
[0009]
另外,本发明的一技术方案可以为:在上述的显示控制装置的基础上,所述计算部根据与从一系列动作开始到结束为止的卷线筒的旋转位置对应的所述卷线筒的线卷直径来计算所述卷取距离。根据上述结构,由于以反映由于卷线筒的旋转位置而产生的卷线筒的线卷直径变化的方式计算卷取距离,因此能够提高基于该卷取距离显示的水深的差值的值的正确性。
[0010]
另外,本发明的一技术方案可以为:在上述的显示控制装置的基础上,具有时间测量部,其对从所述一系列动作的开始到结束为止的时间进行测量,所述显示控制部进行控制,以使所述显示部在进行基于所述卷取距离的显示的同时进行基于由所述时间测量部测量出的时间的显示。根据上述结构,能够将卷线筒进行一系列动作的时间与水深差值一起显示。
[0011]
另外,本发明的一技术方案为一种具有上述显示控制装置的钓鱼用渔线轮。
[0012]
另外,本发明的一技术方案为一种钓鱼用渔线轮的显示控制方法,具有计算步骤和显示控制步骤,在所述计算步骤中,根据基于旋转方向赋予卷线筒的规定的一系列动作从开始到结束为止的卷线筒的旋转状态来计算由进行所述一系列动作的所述卷线筒卷取渔线的卷取距离,其中所述旋转方向是指与渔线的卷取对应的方向,在所述显示控制步骤中,进行控制,以使显示部进行基于所述计算步骤计算出的卷取距离的显示。
[0013]
另外,本发明的一技术方案为一种显示控制程序,所述显示控制程序用于使作为钓鱼用渔线轮的显示控制装置的计算机发挥计算部和显示控制部的功能,其中,所述计算部根据基于旋转方向赋予卷线筒的规定的一系列动作从开始到结束为止的卷线筒的旋转状态来计算由进行所述一系列动作的所述卷线筒卷取渔线的卷取距离,其中所述旋转方向是指与渔线的卷取对应的方向,所述显示控制部进行控制,以使显示部进行基于所述计算部计算出的卷取距离的显示。[发明效果]
[0014]
如以上说明的那样,根据本发明能够获得以下效果:能够以数值的方式准确地掌握使钓鱼用渔线轮的卷线筒进行一系列动作而产生的渔线的卷取距离。
附图说明
[0015]
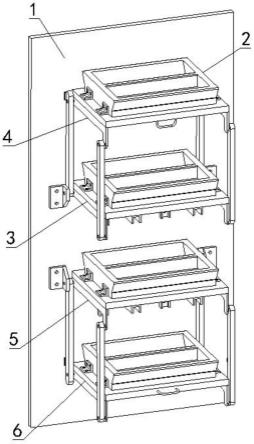
图1是表示本实施方式的钓鱼用电动渔线轮的外观例的图。图2是表示本实施方式的钓鱼用电动渔线轮的外观例的图。图3是表示本实施方式的钓鱼用电动渔线轮的显示操作面板的一例的图。图4是表示在本实施方式的自动卷取动作中卷线筒行为和电机驱动信号的占空比随着时间的推移的变化例的图。图5是表示本实施方式的显示部的显示方式例的图。图6是表示本实施方式的显示部的显示方式例的图。图7是表示本实施方式的钓鱼用电动渔线轮的功能结构例的图。图8是表示本实施方式的钓鱼用电动渔线轮响应于卷取操作而执行的处理步骤例的流程图。
图9是表示本实施方式的钓鱼用电动渔线轮所执行的作为驱动控制参数对应卷线筒驱动控制的处理步骤例的流程图。[附图标记说明]1:钓鱼用电动渔线轮;4:卷线筒;8:电机;41:显示操作面板;101:操作部;102:显示部;103:控制部;104:存储部;105:电机驱动电路;106:旋转传感器;131:参数设定部;132:卷线筒驱动控制部;133:计算部;134:显示控制部;135:时间测量部;141:驱动控制信息存储部;142:占空比存储部;143:中间卷取速度存储部;144:线长和卷线筒旋转位置表格存储部。
具体实施方式
[0016]
《实施方式》下面,参照附图来说明作为本实施方式的参数设定装置的钓鱼用电动渔线轮1。在本实施方式中,卷线筒的驱动是指,例如通过驱动电机等获得的动力使卷线筒旋转。另外,在本实施方式中,卷线筒的驱动控制是指,与卷线筒的驱动有关的控制。这样的卷线筒的驱动控制包括使卷线筒旋转的控制、使卷线筒的旋转停止的控制、变更卷线筒的旋转速度的控制等。另外,在之后的说明中,关于卷线筒的“驱动”,有时以清楚地说明是给予旋转的动作等为目的,而将其记载为“旋转驱动”。此外,在以下的说明中,列举出钓鱼用电动渔线轮1为双轴承渔线轮的情况作为示例。此外,在图1、图2中,为了能够视觉确认各结构部件,有时根据需要而适当变更了各结构部件的比例尺。
[0017]
[钓鱼用电动渔线轮的结构例]图1、2示出了本实施方式的钓鱼用电动渔线轮1的外观例。本实施方式的钓鱼用电动渔线轮1主要具有渔线轮主体2、手柄3、卷线筒4和离合器机构6,其中,所述渔线轮主体2可安装于未图示的钓竿;所述手柄3以可绕手柄轴线o1旋转的方式安装于渔线轮主体2;所述卷线筒4能够相对于渔线轮主体2绕与手柄轴线o1平行的卷线筒轴线o2旋转,且用于卷绕未图示的渔线;所述离合器机构6具有离合器操作杆5。
[0018]
另外,本实施方式的钓鱼用电动渔线轮1具有电机(未图示),该电机被配置于在渔线轮主体2上设置的电机收容筒7内,且用于对卷线筒4进行旋转驱动。另外,钓鱼用电动渔线轮1具有电机支架(未图示),该电机支架以封堵电机收容筒7的方式被组合于渔线轮主体2,且用于将电机固定于渔线轮主体2。
[0019]
在本实施方式中,手柄轴线o1和卷线筒轴线o2被相互平行配置,将沿着这些轴线的方向定义为左右方向l1。而且,将与左右方向l1正交,且与沿着被卷绕于卷线筒4的渔线放出的方向的方向定义为前后方向l2。而且,在前后方向l2上将从卷线筒4放出渔线的方向定义为前方,将其相反方向定义为后方,并且以从后侧(垂钓者侧)观察钓鱼用电动渔线轮1的视角来定义左右。因此,图1是从斜上方且左后方观察钓鱼用电动渔线轮1的立体图。
[0020]
渔线轮主体2具有主体框架10、侧罩20和前罩30,其中,所述侧罩20覆盖主体框架
10的左右两侧;所述前罩30覆盖主体框架10的前部侧。
[0021]
主体框架10例如为由合成树脂或者金属制成(例如铝压铸制成)的成型零部件。主体框架10具有第1侧壁11、第2侧壁12和连接部件13,其中,所述第1侧壁11和第2侧壁12被配置为隔着卷线筒4在左右方向l1上相向;所述连接部件13在左右方向l1上连接第1侧壁11和第2侧壁12。
[0022]
第1侧壁11为相对于卷线筒4被配置于左侧(lh)的左侧壁。相对于此,第2侧壁12为相对于卷线筒4被配置于右侧(rh)的右侧壁。此外,手柄3被配置得比第2侧壁12更靠右侧(rh),且利用第2侧壁12被安装于主体框架10。因此,本实施方式的钓鱼用电动渔线轮1为右侧手柄类型的渔线轮。此外,第2侧壁12因安装连接器部23等的原因,而形成为比第1侧壁11朝向下方突出。
[0023]
连接部件13被形成为在左右方向l1上连接第1侧壁11和第2侧壁12的板状,且被配置于第1侧壁11的下部附近。据此,第1侧壁11和第2侧壁12通过连接部件13被牢固地连接。此外,在连接部件13的左右方向l1上的中央部分,形成有用于将钓鱼用电动渔线轮1安装于钓竿的安装腿片14,该安装腿片14沿着前后方向l2延伸。
[0024]
在如上述这样构成的主体框架10中,在第1侧壁11与第2侧壁12之间,至少配置有内部收容电机的电机收容筒7、卷线筒4和离合器操作杆5等。
[0025]
卷线筒4以比手柄轴线o1靠后侧的方式被配置于第1侧壁11与第2侧壁12之间。电机收容筒7以比手柄轴线o1靠前侧的方式被配置于第1侧壁11与第2侧壁12之间。因此,本实施方式的钓鱼用电动渔线轮1为电机被配置于比卷线筒4靠前侧的位置的、所谓的卷线筒外电机类型。
[0026]
侧罩20具有第1侧罩21和第2侧罩22,其中,所述第1侧罩21以从左侧(lh)覆盖形成有电机收容筒7的开口部的第1侧壁11的方式组合于主体框架10;所述第2侧罩22以从右侧(rh)覆盖第2侧壁12的方式组合于主体框架10。
[0027]
第1侧罩21以朝向左侧(lh)鼓出的方式形成,例如被螺纹紧固于第1侧壁11。第2侧罩22以朝向右侧(rh)鼓出的方式形成,例如被螺纹紧固于第2侧壁12。在第2侧罩22的位于前下部的部分上,以未图示的连接端朝下的状态安装有连接器部23,该连接器部23用于连接用于供给来自外部电源的电功率的电源卷盘电线或者便携式电池。此外,在各附图中,图示出了通过保护盖24保护连接端的状态。
[0028]
前罩30以从前方覆盖主体框架10的前部的方式组合于主体框架10。具体而言,前罩30以从前方覆盖电机收容筒7的方式组合于第1侧壁11和第2侧壁12的前部,并且例如被螺纹紧固于第1侧壁11和第2侧壁12。此外,前罩30以不封堵后述的匀绕器55的移动区域的方式进行安装。
[0029]
在如上述这样构成的主体框架10的上部设置有计数器盒体40。计数器盒体40以配置于第1侧壁11与第2侧壁12之间的状态,例如通过螺纹紧固等方式被固定于第1侧壁11的上部和第2侧壁12的上部。
[0030]
计数器盒体40的主体的上表面构成为显示操作面板41。显示操作面板41为用于向使用钓鱼用电动渔线轮1的使用者进行显示和用于使用者对按钮、开关等操作件进行操作的部位。
[0031]
图3示出钓鱼用电动渔线轮1的显示操作面板41。如该图所示,显示操作面板41具
有操作部101和显示部102。
[0032]
操作部101为用于使用者进行按钮操作的部位。在该图的例子中,操作部101配置有作为进行按钮操作的按钮的第1按钮111-1、第2按钮111-2、第3按钮111-3的3个按钮。此外,在之后的说明中,在不特别区分第1按钮111-1、第2按钮111-2、第3按钮111-3的情况下,记载为按钮111。
[0033]
作为该图中的按钮111的配置方式,按照第2按钮111-2在上且第3按钮111-3在下的位置关系而沿着上下方向进行配置。第1按钮111-1比配置有第2按钮111-2和第3按钮111-3的位置靠左侧,在上下方向上,被配置于与第2按钮111-2和第3按钮111-3的中间对应的位置。即使使这样的按钮111的配置中的第2按钮111-2和第3按钮111-3分别作为参数值的变更、项目选择等操作的向上按钮、向下按钮发挥功能,使用者也容易习惯该操作感觉。
[0034]
另外,在操作部101中设置有卷取开关112。卷取开关112为进行用于使卷线筒4旋转而卷取渔线的操作的操作件。卷取开关112为进行用于自动卷取渔线的操作的开关。卷取开关112为杠杆式的压敏开关,能够进行将上侧开关部112a下压的操作和将下侧开关部112b下压的操作。
[0035]
显示部102为响应于钓鱼用电动渔线轮1的动作而显示规定的内容的部位。作为显示部102而具有的显示设备没有特别限定,例如可列举出液晶显示设备、有机el显示设备等。
[0036]
返回图1、图2来进行说明。手柄3用于通过手动来将渔线卷取的操作。手柄3被配置于比主体框架10和第1侧罩21靠右侧(rh)的位置。手柄3具有手柄轴部50、手柄臂51和手柄把手52,其中,所述手柄轴部50以可绕手柄轴线o1旋转的方式配置;所述手柄臂51以不可旋转的方式被安装于手柄轴部50;所述手柄把手52以可绕与手柄轴线o1平行的轴线旋转的方式被安装于手柄臂51的端部。在手柄臂51与第1侧罩21之间,设置有以与手柄轴线o1同轴的方式配置的曳力装置53(星形曳力装置)。该曳力装置53在卷绕渔线时通过对卷线筒4施加任意的曳力来进行卷线筒4的旋转制动,发挥有助于抑制渔线切断的作用。
[0037]
在离合器机构6处于离合器接合状态时,来自这样构成的手柄3的旋转扭矩通过未图示的旋转传递机构被直接传递至卷线筒4。此外,在本实施方式中,列举在手柄臂51的一端部安装有手柄把手52的、所谓的单手柄类型的钓鱼用电动渔线轮1为例来进行说明,但并不限定于该情况。例如,也可以为在手柄臂51的两端部安装手柄把手52,且将手柄臂51的中央部以不可旋转的方式安装于手柄轴部50的、所谓的双手柄类型的钓鱼用电动渔线轮1。
[0038]
卷线筒4被配置于框架主体中的位于第1侧壁11与第2侧壁12之间的部位,并且通过未图示的轴承以可绕卷线筒轴线o2旋转的方式被第1侧壁11和第2侧壁12分别支承。卷线筒4具有未图示的卷线筒旋转轴部和卷线主体部4a,其中,所述卷线筒旋转轴部绕卷线筒轴线o2进行旋转;所述卷线主体部4a以与卷线筒旋转轴部同轴的方式配置,并且与卷线筒旋转轴部联动而进行旋转。
[0039]
离合器机构6通过离合器操作杆5的操作能够在离合器接合状态和离合器断开状态之间进行切换,在所述离合器接合状态下,能将来自手柄3的旋转扭矩经由未图示的旋转
传递机构传递至卷线筒4;在所述离合器断开状态下,不能传递该旋转扭矩。因此,在离合器接合状态下,通过旋转操作手柄3,能够将伴随手柄3的旋转操作产生的旋转扭矩传递至卷线筒4,从而能够使卷线筒4绕卷线筒轴线o2旋转。据此,能够进行手动卷线操作。此外,在离合器机构6为离合器断开状态的情况下,伴随手柄3的旋转操作产生的旋转扭矩不会传递至卷线筒4,从而该卷线筒4成为可自由旋转的状态(卷线筒自由的状态)。
[0040]
离合器操作杆5为用于将离合器机构6切换操作为离合器接合状态和离合器断开状态的切换杆。离合器操作杆5在比卷线筒4靠后方的位置被配置于第1侧壁11与第2侧壁12之间,并且能够以绕卷线筒轴线o2摆动的方式上下移动。
[0041]
此外,旋转传递机构构成为在对手柄3的旋转进行增速的状态下将旋转扭矩传递至卷线筒4。而且,旋转传递机构构成为,在离合器机构6处于离合器接合状态的情况下,不仅将伴随手柄3的旋转操作产生的旋转扭矩传递至卷线筒4,而且也将其传递至匀绕器机构(未图示)。匀绕器机构为用于将渔线均匀且无偏倚地卷绕于卷线筒4的机构。
[0042]
而且,当在离合器机构6处于离合器接合状态的情况下电机被驱动时,旋转传递机构能够将伴随该电机的驱动产生的旋转扭矩传递至卷线筒4。据此,能够进行自动卷线操作。此外,旋转传递机构在对电机的旋转进行减速的状态下将旋转扭矩传递至卷线筒4。
[0043]
[关于电动铁板钓模式]本实施方式的钓鱼用电动渔线轮1在开启电动铁板钓模式的状态下,可以如以下这样响应于使用者对卷取开关112进行的操作,执行渔线的卷取动作。
[0044]
在电动铁板钓模式下,卷取开关112的上侧开关部112a被分配给对用于卷取渔线的卷线筒4的旋转驱动进行接通断开的操作。即,当使用者开始按压上侧开关部112a时,卷线筒4开始被旋转驱动,渔线也开始被卷取。在使用者保持持续按压上侧开关部112a的期间,卷线筒4也持续被旋转驱动,渔线也被持续卷取。当使用者解除对上侧开关部112a的按压时,卷线筒4的旋转驱动停止,渔线也停止卷取。在电动铁板钓模式下,在最初进行上侧开关部112a的按压时,作为电动式手控铁板钓,以小于预先设定的最大速度的卷线筒的旋转速度(中间卷取速度)卷取渔线。之后,当在保持持续按压上侧开关部112a的状态下以进一步按压的方式进行操作时,以卷取速度增加至最大的状态卷取渔线。
[0045]
另外,在电动铁板钓模式下,卷取开关112的下侧开关部112b被分配用于执行自动诱鱼动作(自动抽动)的操作。即,响应于使用者进行按压1次下侧开关部112b的操作(单击操作),按照预先设定的驱动控制信息在某个期间旋转驱动卷线筒4,进行将渔线卷取的动作。
[0046]
本实施方式的构成与自动诱鱼动作对应的驱动控制信息的驱动控制参数为驱动时间[time]、速度[speed]和加速度[accel]这3个参数。驱动时间[time]为在1次自动诱鱼动作中旋转驱动卷线筒4的时间。速度[speed]为在自动诱鱼动作中将渔线卷取时的卷线筒4的旋转速度。加速度[accel]为在自动诱鱼动作中卷线筒4从开始旋转起直到达到速度[speed]时的加速度(角加速度)。
[0047]
驱动时间[time]的参数值(驱动时间参数值vt)、速度[speed]的参数值(速度参数值vs)、加速度[accel]的参数值(加速度参数值va)分别如后面所述那样,能够通过由使用者进行操作而变更。
[0048]
驱动时间参数值vt可以是例如由规定的小数点后的位数所表示的以秒为单位的值。速度参数值vs可以为例如按照规定数量的速度等级(例如,30级左右)而设定的值,规定数量的速度等级分别对应于规定的速度。
[0049]
加速度参数值va可以为按照与规定的加速度分别对应的级数而设定的值。具体而言,在本实施方式中,列举出加速度参数值va为3级的情况作为示例,这3级分别为与作为高加速度的规定的加速度对应的va_h、与作为中加速度的规定的加速度对应的va_m、与对应于低加速度的规定的加速度对应的va_l。
[0050]
例如,加速度参数值va也可以能够通过指定加速度的值等来精细地设定。然而,在该情况下,使用者反而难以判断哪个值合适。因此,在本实施方式中,通过3级左右的较少的级数来变更加速度参数值va,使用者能够明确地掌握卷线筒的旋转行为在各级的差异。此外,加速度参数值va的级数没有特别限定。
[0051]
图4的(a)示出了与通过设定上述的驱动时间[time]、速度[speed]和加速度[accel]的驱动控制参数来进行的1次自动诱鱼动作对应的卷线筒4的行为的例子。在该图中,横轴为时间,纵轴为旋转速度。在该图中,分别示出了在设定了加速度参数值va_h时的卷线筒行为gh、设定了加速度参数值va_m时的卷线筒行为gm、设定了加速度参数值va_l时的卷线筒行为gl。
[0052]
在设定了加速度参数值va_h时的卷线筒行为gh如下所示。在时刻t0,响应于由使用者进行了1次按压卷取开关112的下侧开关部112b的操作,钓鱼用电动渔线轮1使卷线筒的旋转驱动开始。即,钓鱼用电动渔线轮1从时刻t0起开始施加用于驱动电机的电压(电机驱动信号)。但是,即使在时刻t0使卷线筒的旋转驱动开始,到旋转被传递至卷线筒4为止,会产生一定的时滞(延迟)。因此,卷线筒4从时刻t1开始旋转,时刻t1是从时刻t0经过一定时间后的时刻。
[0053]
在时刻t1开始旋转的卷线筒4以与所设定的加速度参数值va_h的参数值相应的加速度,使旋转速度逐渐增加。然后,到了时刻t2(1),卷线筒4的旋转速度达到与所设定的速度参数值vs相对应的旋转速度(目标旋转速度vtg)。在时刻t2(1)以后,卷线筒4被控制为以与速度参数值vs对应的一定旋转速度进行旋转。
[0054]
钓鱼用电动渔线轮1在时刻t0开始卷线筒4的旋转驱动的时刻开始测量(计时)驱动持续时间t。然后,当所测量的驱动持续时间t的值到达时刻t3而达到驱动时间参数值vt时,停止向电机供给电流以使卷线筒4的旋转驱动停止。
[0055]
电机会产生被称为超限运转(over run)的现象,即,即使停止供给电流,电机也会因惯性而无法立即停止,而是在旋转一定程度后停止。在该图的例子中,在时刻t3之后的产生了超限运转的期间,卷线筒4的旋转速度减速,在时刻t4卷线筒4的旋转停止。
[0056]
另外,在设定了加速度参数值va_m时的卷线筒行为gm如下所示。在该情况下,也在时刻t0,响应于由使用者进行1次按压卷取开关112的下侧开关部112b的操作,钓鱼用电动渔线轮1开始施加用于使卷线筒的旋转驱动开始的电机驱动信
号和测量驱动持续时间t。然后,卷线筒4从时刻t1开始旋转,时刻t1是从时刻t0经过一定时间后的时刻。
[0057]
在时刻t1开始旋转的卷线筒4以与所设定的加速度参数值va_m的参数值相应的加速度,使旋转速度逐渐增加。在该情况下,到了比时刻t(1)靠后的时刻t2(2),卷线筒4的旋转速度达到目标旋转速度vtg。在时刻t2(2)以后,卷线筒4被控制为以与速度参数值vs对应的一定旋转速度进行旋转。
[0058]
然后,到了时刻t3,当测量出的驱动持续时间t达到驱动时间参数值vt时,停止向电机供给电流,在经过了超限运转的期间的时刻t4,卷线筒4的旋转停止。
[0059]
另外,设定了加速度参数值va_l时的卷线筒行为gl如下所示。在该情况下,也在时刻t0,响应于使用者进行1次按压卷取开关112的下侧开关部112b的操作,钓鱼用电动渔线轮1开始施加用于使卷线筒的旋转驱动开始的电机驱动信号和测量驱动持续时间t。卷线筒4从时刻t1开始旋转,时刻t1是从开始施加电机驱动信号的时刻t0经过一定的时滞(延迟)的时刻。
[0060]
在时刻t1开始旋转的卷线筒4以与所设定的加速度参数值va_l的参数值相应的加速度,使旋转速度逐渐增加。在这种情况下,到了比时刻t2(2)还靠后的时刻t2(3),卷线筒4的旋转速度达到目标旋转速度vtg。在时刻t2(3)以后,卷线筒4被控制为以与速度参数值vs对应的一定旋转速度进行旋转。
[0061]
然后,到了时刻t3,当所测量的驱动持续时间t达到驱动时间参数值vt时,停止向电机供给电流,在经过了超限运转的期间的时刻t4,卷线筒4的旋转停止。
[0062]
此外,按照加速度参数值va的不同,卷线筒4开始旋转的时刻t1可能不同。然而,在该图中为了便于容易地理解图示,示出了与加速度参数值va无关地,将卷线筒行为gh、gm、gl的时刻t1设为相同时刻的例子。
[0063]
本实施方式的钓鱼用电动渔线轮1通过pwm(pulse width modulation:脉冲宽度调制)控制来驱动电机,从而旋转驱动卷线筒4。因此,钓鱼用电动渔线轮1在驱动电机时,对施加于电机的电压(电机驱动信号)设定每个周期的脉冲宽度的占空比。
[0064]
图4的(b)表示与图4的(a)所示的各卷线筒行为gh、gm、gl相对应的电机驱动信号的占空比转变dh、dm、dl的一例。在该图中,横轴为时间,纵轴为占空比。
[0065]
作为与卷线筒行为gh对应的占空比转变dh,首先,在从时刻t0起直至卷线筒的旋转速度达到目标旋转速度vtg为止的期间(初始动作期间的一例),开始施加与加速度参数值va_h对应的初始占空比dh的电机驱动信号。据此,卷线筒4从经过了时滞的时刻t1开始旋转,旋转速度以与初始占空比dh的电机驱动信号对应的加速度逐渐上升。然后,到了时刻t2(1),当卷线筒4的旋转速度达到目标旋转速度vtg时,改变为用于按目标旋转速度vtg恒定地旋转驱动卷线筒4的匀速对应占空比ds。在时刻t2(1)之后进行反馈控制,即对卷线筒4的旋转速度进行检测,以使检测出的旋转速度成为目标旋转速度vtg的方式改变匀速对应占空比ds。在该图中,为了便于清楚地图示,示出了匀速对应占空比ds不随着事件经过发生变化而处于恒定的状态,但匀速对应占空比ds会通过反馈控制而发生变动。例如,用于保持目标旋转速度vtg的匀速对应占空比ds会由于水中的终端钓具的状态、对应于线卷直径的卷线筒4的每旋转一周的卷线长度等的影响而发生变动。
[0066]
但是,能够与速度参数值vs的每级对应而控制的匀速对应占空比ds的范围被预先确定。通过这样按速度参数值vs确定匀速对应占空比ds的范围,即使在低速设定下成为对电机施加高载荷的状态,也能够限制匀速对应占空比ds不成为100%。据此,可以避免虽改变了速度参数值vs但实际的卷取速度也没有变化的状态。
[0067]
此外,例如在以恒定张力卷取渔线的张力恒定模式下,占空比以规定值控制为恒定。但是,即使在张力恒定模式下,张力也会因卷线筒4的线卷直径而发生变化,因此,以占空比与这样的张力变化对应而进行变化的方式进行控制。
[0068]
在此之后,当到达时刻t3时,停止施加电机驱动信号,其中,时刻t3为所测量的驱动持续时间t达到驱动时间参数值vt的时刻。
[0069]
另外,作为与卷线筒行为gm对应的占空比转变dm,首先,从时刻t0开始施加与加速度参数值va_m对应的初始占空比dm的电机驱动信号。由于初始占空比dm对应于中加速度,因此小于与对应于高加速度的加速度参数值va_h对应的初始占空比dh。该情况下的时刻t1之后的卷线筒4的旋转的加速度比与高加速度对应的初始占空比dh的情况低。然后,在达到了目标旋转速度vtg的时刻t(2)之后,维持匀速对应占空比ds。在此之后,当到达驱动持续时间t达到驱动时间参数值vt的时刻t3时,停止施加电机驱动信号。
[0070]
另外,作为与卷线筒行为gl对应的占空比转变dl,首先,从时刻t0开始施加与加速度参数值va_l对应的初始占空比dl的电机驱动信号。由于初始占空比dl对应于低加速度,因此,小于与对应于中加速度的加速度参数值va_m对应的初始占空比dm。该情况下的时刻t1之后的卷线筒4的旋转的加速度比与中加速度对应的初始占空比dm的情况低。然后,在达到了目标旋转速度vtg的时刻t(3)之后,维持匀速对应占空比ds。在此之后,当到达驱动持续时间t达到驱动时间参数值vt的时刻t3时,停止施加电机驱动信号。
[0071]
从该图可知,钓鱼用电动渔线轮1根据驱动控制参数中的各参数值(驱动时间参数值vt、速度参数值vs、加速度参数值va),随着时间的推移使电机驱动信号的占空比发生变化,由此进行与自动诱鱼动作对应的卷线筒4的旋转驱动。
[0072]
作为驱动控制参数,也可以不设置加速度[accel],而是例如以与固定的占空比对应的加速度,或从最初开始按与速度参数值vs对应的占空比使卷线筒4开始旋转。然而,例如在使用者实际上一边移动钓竿一边进行的诱鱼动作中,有时根据状况来变更诱鱼时的最初的扬竿的力度会关系到钓鱼效果。因此,如果如本实施方式那样设置加速度[accel]的驱动控制参数,则在自动诱鱼动作中,能够根据使用者的意图来变更上述那样的诱鱼时的扬竿最初的力度。
[0073]
如图4的(b)所示,钓鱼用电动渔线轮1响应于操作了1次卷取开关112的下侧开关部112b,按照驱动控制参数的各参数值改变电机驱动信号的占空比。据此,如图4的(a)所示,卷线筒4的转速发生变化,从而执行1次自动诱鱼动作。通过以这种对应于卷线筒4的旋转速度而进行变化的卷取速度来卷取渔线,能够得到自动的诱鱼动作。
[0074]
[关于对应于自动诱鱼动作的驱动控制参数的设定]接着,说明对应于自动诱鱼动作的驱动控制参数(驱动时间[time]、速度[speed]和加速度[accel])的各参数值(驱动时间参数值vt、速度参数值vs、加速度参数值va)的设定操作的步骤例。在本实施方式中,能够在开启电动铁板钓模式的状态下进行对应于自动诱鱼动作的驱动控制参数的设定操作。
本实施方式中的驱动控制参数的设定包括:作为参数值的变更对象的驱动控制参数的选择;和作为变更对象而选择的驱动控制参数的参数值的变更。
[0075]
图5示出了开启电动铁板钓模式的状态下的显示部102的显示例。在该图的显示部102中,配置有速度和水深差区域ar10、水深区域ar20以及参数显示区域ar30。速度和水深差区域ar10为通过级数来显示当前所设定的卷线筒4的旋转速度的区域。另外,在电动铁板钓模式下,还能够在速度和水深差区域ar10中显示由于卷取渔线而引起的终端钓具的水深差(水深的差值)。具体而言,在进行电动铁板钓的情况下,速度和水深差区域ar10显示水深差,该水深差是开始对上侧开关部112a的按压操作而使卷线筒4开始旋转时的终端钓具所在位置的水深与在此之后解除对上侧开关部112a的按压而使卷线筒4停止旋转时的终端钓具所在位置的水深之差。另外,在为了进行自动诱鱼动作而对下侧开关部112b进行单击操作的情况下,速度和水深差区域ar10显示水深差,该水深差是按照驱动控制信息使卷线筒4开始旋转时的终端钓具所在位置的水深与在此之后使卷线筒4停止旋转时的终端钓具所在位置的水深之差。
[0076]
图6示出了以下显示方式的例子:在开始电动铁板钓模式的状态下,响应于进行上述电动式手控铁板钓或自动诱鱼动作,在速度水深区域ar10中显示水深差,来代替显示卷线筒4的旋转速度。此外,该图的水深差的显示方式是一例。水深差也可以显示在显示部102中的其他区域。
[0077]
返回到图5进行说明。水深区域ar20是显示终端钓具当前所在位置的水深的区域。
[0078]
参数显示区域ar30是显示每个驱动控制参数在当前被设定的参数值的区域。在参数显示区域ar30中,包含驱动时间显示区域ar31-1、速度显示区域ar31-2、加速度显示区域ar31-3。在不进行特别区分的情况下,将驱动时间显示区域ar31-1、速度显示区域ar31-2、加速度显示区域ar31-3记载为各别参数显示区域ar31。驱动时间显示区域ar31-1是显示当前所设定的驱动时间参数值vt的区域。速度显示区域ar31-2是显示当前所设定的速度参数值vs的区域。加速度显示区域ar31-3是显示当前所设定的加速度参数值va的区域。
[0079]
在该图中示出了在参数显示区域ar30中驱动时间显示区域ar31-1处于被强调显示的状态的例子。这样强调显示驱动时间显示区域ar31-1的状态表示在驱动控制参数(驱动时间[time]、速度[speed]和加速度[accel])中,选择了驱动时间[time]作为参数值的变更对象。在参数显示区域ar30中,根据驱动控制参数(驱动时间[time]、速度[speed]和加速度[accel])中的一个被选择为变更对象,而使驱动时间显示区域ar31-1、速度显示区域ar31-2和加速度显示区域ar31-3中的一个处于被强调显示的状态。
[0080]
此外,作为强调显示的方式,在该图中,将选择对象的各别参数显示区域ar31相对于另一个各别参数显示区域ar31以明暗颠倒的方式进行显示。作为强调显示的方式,没有特别限定,例如,可以将选择对象的各别参数显示区域ar31的框、文字加粗,或者在彩色显示的情况下,变更背景颜色或文字颜色。
[0081]
此外,可以在响应于开启了电动铁板钓模式而进行初始显示时的参数显示区域ar30中,例如接着最后关闭电动铁板钓模式时的状态而强调显示各别参数显示区域ar31。或者,也可以强调显示与预先确定的特定的驱动控制参数对应的各别参数显示区域ar31。
[0082]
当在电动铁板钓模式下显示图5的状态的参数显示区域ar30时,使用者可以通过以下说明的操作来变更作为变更对象而选择的驱动时间[time]的参数值(驱动时间参数值vt)。在这种情况下,使用者持续对操作部101的第1按钮111-1按压的状态。即,使用者使第1按钮111-1成为被持续按压操作的操作持续状态。据此,钓鱼用电动渔线轮1能够受理对第2按钮111-2或第3按钮111-3的操作作为变更参数值的操作。
[0083]
使用者在使驱动时间参数值vt增加的情况下,一边持续按压第1按钮111-1的状态,一边操作第2按钮111-2。每按压1次第2按钮111-2,驱动时间参数值vt以递增的方式增加。另外,使用者在使驱动时间参数值vt减少的情况下,一边持续按压第1按钮111-1的状态,一边操作第3按钮111-3。每按压1次第3按钮111-3,驱动时间参数值vt以递减的方式减少。
[0084]
此外,可以响应于使用者长按第2按钮111-2,驱动时间参数值vt直至第2按钮111-2的按压被解除为止连续递增。另外,可以响应于使用者长按第3按钮111-3,驱动时间参数值vt直至第3按钮111-3的按压被解除为止连续递减。
[0085]
在驱动时间显示区域ar31-1中,以反映出通过上述的操作而变更的驱动时间参数值vt的方式进行显示。据此,使用者能够确认通过自己的操作而变更的驱动时间参数值vt。
[0086]
如上述那样将驱动时间参数值vt变更为所希望的值后,使用者解除此前持续进行的第1按钮111-1的按压。据此,钓鱼用电动渔线轮1不受理用于变更驱动时间参数值vt的对第2按钮111-2和第3按钮111-3进行的操作。另外,钓鱼用电动渔线轮1将在第1按钮111-1的按压被解除时在驱动时间显示区域ar31-1中所显示的值确定为驱动时间参数值vt,从而完成驱动控制参数的设定。
[0087]
此外,在第1按钮111-1被按压的状态下,钓鱼用电动渔线轮1可以使对卷取开关112进行的操作无效。即,可以为,在第1按钮111-1被按压的状态下,即使使用者操作上侧开关部112a,卷线筒4也不会旋转,即使操作下侧开关部112b,也不会进行自动诱鱼动作。据此,能够防止由于在卷线筒4正在旋转的状态下变更驱动控制参数而使卷线筒4的旋转变得不稳定的情况。
[0088]
另外,在电动铁板钓模式下,使用者能够通过以下的操作来选择作为参数值的变更对象的驱动控制参数。使用者在电动铁板钓模式下,不按压第1按钮111-1,而是对第2按钮111-2或者第3按钮111-3进行操作。
[0089]
使用者每按压1次第2按钮111-2,在参数显示区域ar30中,变化为此前所强调显示的各别参数显示区域ar31的上一段的各别参数显示区域ar31被强调显示的状态。与新强调显示的各别参数显示区域ar31对应的驱动控制参数被选为参数值的变更对象。
[0090]
此外,在最上段的各别参数显示区域ar31被强调显示的状态下,在进行了1次按压第2按钮111-2的操作的情况下,可以使该操作无效,也可以通过轮巡而变化为最下段的各
别参数显示区域ar31被强调显示的状态。
[0091]
另外,使用者每按压1次第3按钮111-3,在参数显示区域ar30中,变化为此前所强调显示的各别参数显示区域ar31的下一段的各别参数显示区域ar31被强调显示的状态。在该情况下,也使与新强调显示的各别参数显示区域ar31对应的驱动控制参数被选为参数值的变更对象。
[0092]
此外,在最下段的各别参数显示区域ar31被强调显示的状态下,在进行了1次按压第3按钮111-3的操作的情况下,可以使该操作无效,也可以通过轮巡而变化为最上段的各别参数显示区域ar31被强调显示的状态。
[0093]
这样一来,本实施方式的钓鱼用电动渔线轮1能够进行变更驱动时间[time]、速度[speed]和加速度[accel]各自的驱动控制参数的参数值的操作(参数变更操作)。在此基础上,变更上述的驱动控制参数的参数值的操作在开启电动铁板钓模式的状态下进行。即,使用者能够在电动铁板钓模式下进行变更驱动控制参数的参数值的操作,而无需进行例如从电动铁板钓模式变更为对驱动控制参数进行变更的设定模式的操作。据此,使用者在实际钓鱼的过程中也能够迅速变更自动诱鱼动作的驱动控制参数。
[0094]
另外,变更参数值的操作和选择成为参数值的变更对象的驱动控制参数的操作均使用第2按钮111-2和第3按钮111-3。通过这样在变更参数值的操作和选择驱动控制参数的操作中使用共同的操作件,能够减少设置于钓鱼用电动渔线轮1的操作件的数量。
[0095]
[钓鱼用电动渔线轮的功能结构例]参照图7,对钓鱼用电动渔线轮1的功能结构例进行说明。在该图中,针对与图1、图2相同的部分标注相同的附图标记并适当省略说明。该图的钓鱼用电动渔线轮1具有操作部101、显示部102、控制部103、存储部104、电机驱动电路105、电机8、卷线筒4、旋转传感器106。
[0096]
控制部103用于执行钓鱼用电动渔线轮1的各种控制。通过钓鱼用电动渔线轮1所具有的cpu(central processing unit:中央处理器)执行程序来实现控制部103发挥的功能。控制部103具有参数设定部131、卷线筒驱动控制部132、计算部133、显示控制部134和时间测量部135。参数设定部131响应于对操作部101进行的操作,设定驱动控制参数的各参数值。卷线筒驱动控制部132根据驱动控制信息执行卷线筒4的驱动控制。计算部133根据基于旋转方向赋予卷线筒4的规定的一系列动作从开始到结束为止的卷线筒4的旋转状态来计算由进行上述一系列动作的卷线筒4卷取渔线的卷取距离,其中所述旋转方向是指与渔线的卷取对应的方向,。具体而言,在电动铁板钓模式下进行电动式手控铁板钓的情况下,计算部133计算卷取距离,该卷取距离是通过响应于开始对上侧开关部112a的按压而使卷线筒4旋转且响应于之后解除对上侧开关部112a的按压而使卷线筒4的旋转停止而产生的。另外,为了在电动铁板钓模式下进行自动诱鱼动作而对下侧开关部112b进行了单击操作的情况下,计算部133计算卷取距离,该卷取距离为对应于根据驱动控制信息开始卷线筒4的旋转且之后停止卷线筒4的旋转而产生的距离。显示控制部134控制显示部102中的显示。在电动铁板钓模式下,显示控制部134能
够使速度和水深差区域ar10显示基于由计算部133计算出的卷取距离的水深差。时间测量部135测量从卷线筒4响应于电动铁板钓模式下的自动诱鱼动作而开始旋转起至卷线筒4停止旋转为止的时间。
[0097]
存储部104用于存储与钓鱼用电动渔线轮1对应的各种信息。存储部104具有驱动控制信息存储部141、占空比存储部142、中间卷取速度存储部143及线长和卷线筒旋转位置表格存储部144。
[0098]
驱动控制信息存储部141用于存储驱动控制信息。驱动控制信息为用于在自动诱鱼动作中对卷线筒4进行驱动控制的信息。在驱动控制信息中,如上所述,包含驱动时间[time]、速度[speed]和加速度[accel]的驱动控制参数。
[0099]
占空比存储部142用于存储与加速度参数值va对应的电机驱动信号的占空比。具体而言,占空比存储部142以与每个加速度参数值va_h、va_m、va_l对应的方式存储初始占空比dh、dm、dl。此外,也可以为,在以与每个速度参数值vs对应的方式确定了匀速对应占空比的情况下,占空比存储部142以与每个速度参数值vs建立对应关系的方式存储匀速对应占空比。
[0100]
中间卷取速度存储部143存储中间卷取速度。中间卷取速度为,关于在电动铁板钓模式下响应于上侧开关部112a被按压而旋转驱动卷线筒4时所指定的卷线筒4的旋转速度的参数。例如能够通过使用者进行操作,在比卷线筒4的最大旋转速度低的范围内任意地设定中间卷取速度。
[0101]
线长和卷线筒旋转位置表格存储部144存储线长和卷线筒旋转位置表格。线长和卷线筒旋转位置表格是对应于卷线筒4的每个旋转位置(卷线筒旋转位置)而表示被卷绕于卷线筒4的渔线的长度(线长)的表格。卷线筒旋转位置对应于从开始卷绕渔线到结束卷绕渔线为止由旋转传感器106检测出的卷线筒4的总计的旋转圈数的值。这里的旋转圈数表示卷线筒4旋转一周的次数。线长和卷线筒旋转位置表格被用于由控制部103进行的水深的计算、由计算部133进行的卷取距离的计算等。
[0102]
对应于每个卷线筒旋转位置的卷线筒4的每单位旋转圈数的线长可以定义为近似于1次函数直线。基于此,作为一例,控制部103根据从在卷线筒4卷绕渔线时结束卷绕的卷线筒旋转位置拉出渔线时的线长和卷线筒旋转圈数之间的关系、以及卷绕渔线时的卷线筒总旋转圈数,来求出1次函数直线。控制部103通过对1次函数直线进行积分处理来求出线长与卷线筒旋转位置之间的关系。将这样求出的线长与卷线筒旋转位置之间的关系存储为线长和卷线筒旋转位置表格。利用线长和卷线筒旋转位置表格计算出的水深、渔线卷取距离反映了与卷线筒旋转位置对应的线卷直径的变化。
[0103]
电机驱动电路105根据卷线筒驱动控制部132的控制来驱动电机8。卷线筒驱动控制部132通过pwm控制使电机驱动信号的脉冲宽度的占空比发生变化,从而使电机8的旋转速度发生变化。旋转传感器106检测卷线筒旋转位置、卷线筒旋转圈数、卷线筒4的旋转速度(卷线筒旋转速度)等。
[0104]
[处理步骤例]
参照图8的流程图,对钓鱼用电动渔线轮1根据在开启电动铁板钓模式的状态下对卷取开关112的操作而执行的处理步骤例进行说明。步骤s101:在钓鱼用电动渔线轮1中,卷线筒驱动控制部132判定是否已开始对卷取开关112中的上侧开关部112a进行按压操作。在电动铁板钓模式中,如上所述,在持续按压上侧开关部112a的期间,卷线筒4被旋转驱动,从而卷取渔线。
[0105]
步骤s102:当判定已开始对上侧开关部112a进行按压操作时,卷线筒驱动控制部132判定是否处于在对上侧开关部112a进行按压操作的同时按压第1按钮111-1的状态。在判定为处于按压第1按钮111-1的状态的情况下,进行驱动控制参数的变更(递增),但在该图中,为了方便而省略驱动控制参数变更的步骤,并且处理转换至步骤s112。在这种情况下,由于跳过步骤s104,卷线筒4不会被旋转驱动,从而渔线不会被卷取。即,卷线筒驱动控制部132在第1按钮111-1被按压的状态下,不会受理按压上侧开关部112a的操作作为使卷线筒4旋转的操作。
[0106]
步骤s103:在判定为没有处于第1按钮111-1被按压的状态的情况下,计算部133对应于步骤s101而获取由旋转传感器106对应于开始对上侧开关部112a的按压操作的时刻而检测出的卷线筒旋转位置(开始时卷线筒旋转位置)。
[0107]
步骤s104:卷线筒驱动控制部132以中间卷取速度存储部143存储的中间卷取速度开始用于旋转驱动卷线筒4的驱动控制。
[0108]
步骤s105:在以中间卷取速度通过步骤s104开始用于旋转驱动卷线筒4的驱动控制之后,卷线筒驱动控制部132判定通过处于被按压的状态的上侧开关部112a检测出的按压力是否以增加的方式发生了变化。
[0109]
步骤s106:在判定为按压力以增加的方式发生了变化的情况下,卷线筒驱动控制部132将卷线筒4的旋转速度设定为比当前高的规定值,从而旋转驱动卷线筒4。此外,在当前的卷线筒4的旋转速度成为最大值的情况下,可以跳过步骤s106的处理。
[0110]
步骤s107:卷线筒驱动控制部132判定此前持续的上侧开关部112a被按压的状态是否解除。在判定为上侧开关部112a被按压的状态没有解除的情况下,处理返回至步骤s105。
[0111]
步骤s108:当在步骤s107中判定为上侧开关部112a被按压的状态解除时,卷线筒驱动控制部132使卷线筒4的旋转驱动停止。
[0112]
步骤s109:计算部133获取由旋转传感器106对应于通过步骤s108停止卷线筒4的旋转驱动的时刻而检测出的卷线筒旋转位置(停止时卷线筒旋转位置)。
[0113]
步骤s110:计算部133计算通过响应于此次对上侧开关部112a的按压操作来旋转驱动卷线筒4而被卷取的渔线的长度(卷取距离)。为此,计算部133从线长和卷线筒旋转位置表格中获取从在步骤s104中获取到的开始时卷线筒旋转位置开始直到在步骤s109中获取到的停止时卷线筒旋转位置为止的对应的每个卷线筒旋转位置的线长。计算部133根据所获取到的每个卷线筒旋转位置的线长的累计结果来计算卷取距离。如此一来,计算部133能够通过使用开始时卷线筒旋转位置和停止时卷线筒旋转位置(卷线筒4的旋转状态的一例)对从线长和卷线筒旋转位置表格中获取到的线长进行累计,来计算卷取距离。开始时卷线筒旋转位置和停止时卷线筒旋转位置通过卷线筒4响应于对上侧开关部112a的按压操作
而旋转来得到,因此,成为从卷线筒4的一系列动作开始到结束为止的卷线筒4的旋转状态的一例。
[0114]
步骤s111:对应于在步骤s110中计算出卷取距离,显示控制部134使速度和水深差区域ar10显示基于在步骤s110中计算出的卷取距离的水深差,来代替显示旋转速度的级数。这样显示的水深差表示作为电动式手控铁板钓而使用者开始对上侧开关部112a的按压操作时的水深和解除对上侧开关部112a的按压操作时的水深的差值。
[0115]
显示控制部134在根据在步骤s110中计算出的卷取距离显示水深时,可以将对作为卷取距离而计算出的值的规定的小数点之后进行四舍五入等而取整后的值作为水深差。据此,能够通过实用上易看的位数向使用者提示水深差。
[0116]
步骤s112:在步骤s101中判定为对上侧开关部112a进行的按压操作没有开始的情况下,或者在步骤s102中判定为第1按钮111-1处于被按压的状态的情况下,或者在步骤s111的处理之后,卷线筒驱动控制部132判定是否对下侧开关部112b进行了1次按压的操作。对下侧开关部112b进行1次按压的操作为指示执行1次自动诱鱼动作的操作。在判定为没有对下侧开关部112b进行1次按压的操作的情况下,处理返回至步骤s101。
[0117]
步骤s113:在判定为对下侧开关部112b进行了1次按压的操作的情况下,卷线筒驱动控制部132判定在按压1次下侧开关部112b的操作的同时第1按钮111-1是否处于被按压的状态。在判定为第1按钮111-1处于被按压的状态的情况下,进行驱动控制参数的变更(递减),但在该图中,为了方便而省略驱动控制参数的变更的步骤,处理返回至步骤s101。如此,卷线筒驱动控制部132在第1按钮111-1被按压的状态下,不会受理对下侧开关部112b进行1次按压的操作作为指示执行自动诱鱼动作的操作。
[0118]
步骤s114:在判定为第1按钮111-1没有处于被按压的状态的情况下,计算部133对应于步骤s112而获取与进行下侧开关部112b的按压操作的时刻对应的开始时卷线筒旋转位置。
[0119]
步骤s115:在步骤s109中判定为第1按钮111-1没有处于被按压的状态的情况下,卷线筒驱动控制部132按照驱动控制信息存储器141所存储的驱动控制信息中所包含的驱动控制参数和占空比存储器142所存储的与加速度参数值va对应的占空比,对卷线筒4进行旋转驱动。据此,执行与对下侧开关部112b进行1次按压的操作相应的1次自动诱鱼动作。
[0120]
图9的流程示出了作为图8的步骤s115的驱动控制参数对应卷线筒驱动控制的处理步骤例。步骤s1101:卷线筒驱动控制部132从占空比存储部142获取与当前设定的加速度参数值va对应的初始占空比。步骤s1102:卷线筒驱动控制部132通过所获取的初始占空比来开始驱动电机8。如图4的(a)、图4的(b)所示,响应于在时刻t0开始驱动电机8,从经过了时滞的时刻t1起,卷线筒4开始旋转。步骤s1103:另外,在通过步骤s1102开始驱动电机8的同时,时间测量部135开始测量驱动持续时间t。
[0121]
步骤s1104:卷线筒驱动控制部132判定当前所测量的驱动持续时间t是否为驱动
时间参数值vt以上。即,卷线筒驱动控制部132判定从通过步骤s1102开始驱动电机8的时刻起经过的时间的值是否达到驱动时间参数值vt。
[0122]
步骤s1105:在判定为驱动持续时间t没有达到驱动时间参数值vt的情况下,卷线筒驱动控制部132判定当前所检测出的卷线筒的旋转速度vsp是否达到了目标旋转速度vtg。在判定为卷线筒的旋转速度vsp没有达到目标旋转速度vtg的情况下,处理返回至步骤s1104。
[0123]
步骤s1106:在卷线筒的旋转速度vsp达到了目标旋转速度vtg的情况下,卷线筒驱动控制部132执行匀速控制,以将卷线筒的旋转速度vsp维持在目标旋转速度vtg不变。此时,卷线筒驱动控制部132以使卷线筒的旋转速度vsp成为目标旋转速度vtg的方式,对电机驱动信号的占空比进行控制。在该步骤s1106的处理之后,处理返回至步骤s1104。
[0124]
步骤s1107:在步骤s1104中判定为驱动持续时间t达到了驱动时间参数值vt的情况下,卷线筒驱动控制部132使电机驱动停止。在步骤s1107的处理之后,处理转移至图8的步骤s116。此外,时间测量部135可以根据在步骤s1104中判定为驱动持续时间t达到驱动时间参数值vt,停止驱动持续时间t的测量,并将测量出的驱动持续时间t重置。
[0125]
返回图8进行说明。步骤s116:计算部133获取与通过基于步骤s110的电机驱动停止而使卷线筒4的驱动停止时对应的卷线筒旋转位置(停止卷线筒旋转位置)。
[0126]
步骤s117:计算部133计算作为响应于本次对下侧开关部112b的按压操作的自动诱鱼动作而旋转驱动卷线筒4所产生的卷取距离。步骤s118:显示控制部134使速度和水深差区域ar10显示基于在步骤s117中计算出的卷取距离的水深差。在步骤s118的处理之后,处理返回至步骤s101。
[0127]
此外,在步骤s111、s118中显示的水深差也可以响应于发生规定的触发而被消去。例如,显示控制部134可以在步骤s111、s118中显示水深差之后,以经过了规定时间为触发而消去水深差的显示。也可以响应于水深差的显示被消去,在速度和水深差区域ar10中切换为显示表示此时设定的卷线筒4的旋转速度的级数。另外,显示控制部134可以在步骤s111和s118中显示水深差之后,以进行了对应于下一次电动式手控铁板钓的上侧开关部112a的按压操作或者进行了对应于自动诱鱼动作的下侧开关部112b的按压操作作为触发来消去水深差。即,显示控制部134可以响应于进行了用于开始成为卷取距离的计算对象的下一次卷线筒4的驱动的操作,来消去水深差的显示。
[0128]
根据以上说明的本实施方式的结构,在电动铁板钓模式下,能够进行基于对上侧开关部112a持续地按压操作的电动式手控铁板钓,和基于对下侧开关部分112b进行1次按压操作的自动诱鱼动作。在钓鱼方法中,上述的电动式手控铁板钓和自动诱鱼动作分别对应于1次抽动。在本实施方式中,每当进行这样的1次抽动时,在显示部102上显示与通过1次抽动卷取渔线相对应的终端钓具(terminal tackle)的水深差。所显示的水深差,例如通过到规定的小数位为止的以米为单位的数值来表示。据此,使用者能够准确地掌握终端钓具所处的水深响应于使用者自身在电动铁板钓模式下进行的1次抽动而变化(变浅)了多少。例如,在显示部102的水深区域ar20中显示终端钓具所处的水深。使用者通过自己从在进行
1次抽动前显示于水深区域ar20的水深减去在进行1次抽动后显示于水深区域ar20的水深,能够掌握与1次抽动对应的水深差。但是,在这种情况下,使用者必须记住进行1次抽动前后的水深,并且自己进行计算,因此缺乏迅速性和准确性。相对于此,根据本实施方式,使用者能够迅速且准确地掌握与1次抽动对应的水深差。
[0129]
<变形例>以下,对本实施方式的变形例进行说明。以下说明的变形例可以适当组合。
[0130]
[第1变形例]在上述实施方式中,钓鱼用电动渔线轮1在电动铁板钓模式下,在作为电动式手控铁板钓的卷线筒4的旋转停止的阶段显示水深差,或者在作为自动诱鱼动作的卷线筒4的旋转停止的阶段显示水深差。即,上述实施方式的钓鱼用电动渔线轮1在电动铁板钓模式下,在从卷线筒4开始旋转起至停止旋转为止的一系列动作(1次抽动对应动作)结束的阶段显示水深差。相对于此,本变形例的钓鱼用电动渔线轮1可以在进行电动铁板钓模式下的卷线筒4的1次抽动对应动作的期间,显示响应于渔线的卷取而进行变化的水深差。在电动式手控铁板钓的情况下,本变形例的计算部133响应于开始对上侧开关部112a的按压操作而卷线筒4开始旋转,来开始计算卷取距离,并且计算卷取距离直到之后通过解除对上侧开关部112a的按压操作而使卷线筒4的旋转停止为止。在作为电动式手控铁板钓而使卷线筒4响应于对上侧开关部112a持续的按压操作而进行旋转的期间,显示控制部134使速度和水深差区域ar10显示基于如上述那样由计算部133计算出的卷取距离的水深差。另外,在自动诱鱼动作的情况下,计算部133在1次按压操作下侧开关部112b而使卷线筒4旋转与驱动时间参数值vt对应的时间的期间,进行卷取距离的计算。在卷线筒4如上述那样响应于自动诱鱼动作而进行旋转的期间,显示控制部134使速度和水深差区域ar10显示基于上述那样由计算部133计算出的卷取距离的水深差。如上述那样在进行电动式手控铁板钓或自动诱鱼动作的期间所显示的水深差的数值响应于通过卷线筒4的旋转而逐渐卷取渔线,例如以从零开始逐渐增加的方式进行变化。此外,显示控制部134在如本变形例那样以随着时间的推移而使数值变化的方式显示水深差时,作为一例,可以如0m、0.1m、0.3m
…
这样使数值以规定的长度单位发生变化。例如,在计算部133能够以厘米为单位计算卷取距离的情况下,当显示控制部134直接显示所计算出的卷取距离时,由于水深差在短时间内会发生细微的变化,因此有时不易于使用者观察。因此,通过如上述那样以使水深差以规定的长度单位发生变化的方式进行显示,使用者容易掌握随着时间的推移而变化的水深差的值。
[0131]
[第2变形例]例如,可以在确定了与卷线筒4的单位旋转圈数(单位旋转次数)对应的规定的线长(单位线长)的基础上,计算部133根据在卷线筒4的一系列动作下由旋转传感器106检测出的卷线筒4的旋转圈数和单位线长,计算出卷取距离。如此,在卷线筒4的一系列动作下由旋转传感器106检测出的卷线筒4的旋转圈数也是从卷线筒4的一系列动作开始到结束为止的卷线筒4的旋转状态的一例。
[0132]
[第3变形例]本变形例的钓鱼用电动渔线轮1可以将与在电动铁板钓模式下卷线筒4进行一系列动作的期间相对应的时间与水深差一起显示在显示部102上。如此显示的时间与进行1次抽动的时间(抽动所需时间)对应。作为抽动所需时间的显示,钓鱼用电动渔线轮1可以在电动铁板钓模式下,在卷线筒4结束了1次抽动对应动作的阶段,显示进行了该1次抽动对应动作的时间的长度,也可以在进行1次抽动对应动作的期间显示所测量的时间。也可以与水深差同样,响应于发生规定的触发而消去抽动所需时间的显示。
[0133]
[第4变形例]本变形例的钓鱼用电动渔线轮1,可以在电动铁板钓模式下的电动式手控铁板钓的情况和自动诱鱼动作的情况中的任意一种情况下,进行水深差的显示。同样,本变形例的钓鱼电动渔线轮1可以在电动铁板钓模式下的电动式手控铁板钓的情况和自动诱鱼动作的情况中的任意一种情况下进行第3变形例的抽动所需时间的显示。
[0134]
[第5变形例]本变形例的钓鱼用电动渔线轮1可以在没有设定电动铁板钓模式的状态下,在使用者一边操作手柄3一边通过抽动进行诱鱼(手柄操作铁板钓)时,也进行水深差的显示。在这种情况下,计算部133可以在从卷线筒4响应于通过手柄3开始进行卷取渔线的操作而开始旋转起至卷线筒4停止旋转为止的期间,对应地计算卷取距离,并且显示控制部134基于所计算出的卷取距离进行水深差的显示。在本变形例的基础上,钓鱼用电动渔线轮1可以在卷线筒4的旋转停止的阶段显示水深差,也可以在卷线筒4旋转时显示响应于渔线的卷取而进行变化的水深差。另外,在手柄操作铁板钓时,也可以显示抽动所需时间。因此,本实施方式的显示水深差、抽动所需时间等的结构,也可以适用于不用电机驱动卷线筒的非电动的钓鱼用渔线轮。
[0135]
[第6变形例]在上述实施方式中,成为计算部133计算卷取距离的对象的卷线筒4的一系列动作是与1次抽动对应的从卷线筒4的旋转开始起到旋转停止为止的1次动作。但是,成为计算部133计算卷取距离的对象的卷线筒4的一系列动作不限定于上述卷线筒4的动作。例如也可以与连续的多次抽动相对应而将多次连续的从卷线筒4的旋转开始起到停止为止的动作作为计算部133计算卷取距离的对象。作为一具体例,钓鱼用电动渔线轮1能够作为自动诱鱼动作而设定速度[speed]、驱动时间[drive_time]和停止时间[stop_time]的驱动控制参数。钓鱼用电动渔线轮1响应于指示开始自动诱鱼动作的操作,反复执行使卷线筒4以速度[speed]旋转驱动时间[drive_time],且在经过驱动时间[drive_time]后使卷线筒4以停止时间[stop_time]停止旋转的动作。钓鱼用电动渔线轮1响应于指示结束自动诱鱼动作的操作,使卷线筒4的旋转停止。在进行这样的自动诱鱼动作的情况下,可以将从进行指示自动诱鱼动作开始的操作起至进行指示结束的操作为止所得到的卷线筒4的旋转的动作作为成为卷取距离的计算对象的卷线筒4的一系列动作。
[0136]
[第7变形例]在上述实施方式中,变更对象的参数的选择、变更对象的驱动控制参数的参数值的变更的操作分别使用两个第2按钮111-2和第3按钮111-3作为向上按钮、向下按钮。然而,变更对象的参数的选择、变更对象的驱动控制参数的参数值的变更的操作所使用的操作件的数量并不限定于两个,例如也可以为一个。作为操作件为一个的情况,在该操作件为按钮的情况下,可以每按压操作1次,轮巡变更所选择的变更对象的参数或者参数值。另外,在该操作件为杆等的情况下,可以对应于使杆向规定的一方向移动而以正序的方式对变更对象的参数或者参数值进行变更,对应于使杆向另一方向移动而以倒序的方式对变更对象的参数或者参数值进行变更。
[0137]
[第8变形例]在上述实施方式中,列举出了按钮111(第1按钮111-1、第2按钮111-2、第3按钮111-3)被设为物理性操作件的例子。然而,按钮111也可以例如为在作为触摸面板的显示部102中所显示的作为图像的操作件。
[0138]
此外,可以将用于实现作为上述实施方式中的钓鱼用电动渔线轮1的功能的程序记录于计算机可读取的记录介质,由计算机系统读入并执行被记录于该记录介质的程序,由此来进行作为上述的钓鱼用电动渔线轮1的处理。在此,“由计算机系统读入并执行被记录于记录介质的程序”包括在计算机系统中安装程序。在此所谓的“计算机系统”是指,包括os、周边设备等硬件。另外,“计算机系统”可以包括通过包含互联网或wan、lan、专用线路等通信线路的网络而连接的多个计算机装置。另外,“计算机可读取的记录介质”是指,软盘、磁光盘、rom、cd-rom等可移动介质、内置于计算机系统的硬盘等存储装置。这样,存储有程序的记录介质可以为cd-rom等非暂时性的记录介质。另外,记录介质也包括能够为了分发该程序而从分发服务器访问的设置于内部或者外部的记录介质。存储于分发服务器的记录介质的程序的代码可以与能够由终端装置执行的形式的程序的代码不同。即,只要能够从分发服务器下载并以能够由终端装置执行的形式安装即可,由分发服务器存储的形式不受限制。此外,也可以为,将程序分割为多个,在分别不同的时间进行下载之后在终端装置中合并的结构、或者分发分割后的各个程序的分发服务器不同。而且,“计算机可读取的记录介质”是指,包括通过网络发送程序时的作为服务器或客户端的计算机系统内部的如易失性存储器(ram)那样,在一定时间内保持程序的记录介质。另外,上述程序也可以用于实现上述的功能的一部分。而且,也可以为能够通过与已经记录于计算机系统的程序组合来实现上述功能的所谓差分文件(差分程序)。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。