1.本实用新型涉及无人直升机技术领域,尤其涉及一种无人直升机螺旋桨转速检测装置。
背景技术:
2.无人直升机是一种用于农学、交通运输工程、军事学领域的科学仪器,是由无线电地面遥控飞行的不载人飞行器,它不需要发射系统,能够垂直起降,自由悬停,而且飞行起来灵活性相当高超,实用性非常广泛。无人直升机是由飞控系统、遥控系统、动力系统、图传系统等等系统组成的,其原理很简单,主要是依靠调剂旋翼迎角,来实现上升、下降、倒飞等功能。
3.现有的无人直升机组装完成后,需要对它整体的质量进行检测,其中包括对螺旋桨进行转速检测,现有的转速检测装置一般需要安装在螺旋桨的转轴上,需要贴近螺旋桨转动进行转速检测,但是,该检测方式安拆相对麻烦,每测试一架无人直升机都需要进行安拆,降低检测效率,为此需要设计一种新型无人直升机螺旋桨转速检测装置。
技术实现要素:
4.本实用新型提供一种无人直升机螺旋桨转速检测装置,解决了上述提出的技术问题。
5.为解决上述技术问题,本实用新型提供的一种无人直升机螺旋桨转速检测装置,包括支撑架,所述支撑架底部安装有底座,且支撑架上部两侧端开设有两个镶嵌槽,所述两个镶嵌槽内部一侧均转轴活动连接有旋转臂,且两个旋转臂远离转轴的上端一侧均开设有检测槽,并两个检测槽中安装有激光转速传感器,所述两个旋转臂的对外端,靠近激光转速传感器位置处开设有扣槽,所述支撑架上端安装有安装工作台;
6.所述安装工作台包括防振平台和镶嵌座,所述防振平台上端开设有安装槽,且安装槽内底部安装有多个减振弹簧,所述多个减振弹簧上端安装有限位板,且限位板上端对称安装有两个镶嵌座。
7.优选的,所述安装槽整体呈凸形形状,且限位板安装在安装槽内上方并限位。
8.优选的,所述支撑架上部前端安装有外接模块,且外接模块与两个激光转速传感器电性连接,所述外接模块为usb接口端,并与外部计算机数据连接通电。
9.优选的,所述两个激光转速传感器发射端面向外部安装在安装工作台上的无人直升机螺旋叶片,且在无人直升机螺旋叶片上粘贴有反光膜片。
10.优选的,所述镶嵌座上端开设有镶嵌槽,且镶嵌座侧端螺纹连接有多个锁紧螺丝,并贯穿到镶嵌槽中。
11.优选的,所述镶嵌座的镶嵌槽中嵌入有外部无人直升机脚架,并通过多个锁紧螺丝螺纹限位。
12.与相关技术相比较,本实用新型提供的一种无人直升机螺旋桨转速检测装置具有
如下有益效果:
13.本实用新型提供,人工将无人直升机搬运至安装工作台上,并将两个脚架分别插入到两个镶嵌座的限位槽中,然后将两个镶嵌座上的锁紧螺丝转动拧紧,防止工作时出现位移掉落。
14.本实用新型提供,两个旋转臂转动打开,激光转速传感器发射端面向外部安装在安装工作台上的无人直升机螺旋叶片,控制无人直升机螺旋桨转动,连接桨叶开始转动,两个激光转速传感器发射激光照射到旋转的桨叶上,并每次通过经过的反光膜片接收信号,进行转速检测,检测的信号通过外接模块发送到外部计算机上显示数值,方便使用者通过数值计算出无人直升机螺旋桨转动是否正常。
15.本实用新型提供,无人直升机安装在防振平台的限位板上,在转动过程中产生的振动,传递到多个减振弹簧上,多个减振弹簧收缩反弹,将产生的振动力抵消,防止影响两个旋转臂上的导致激光转速传感器抖动,提高检测精度。
附图说明
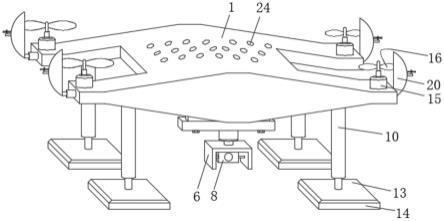
16.图1为本实用新型整体示意图;
17.图2为本实用新型a处放大示意图;
18.图3为本实用新型安装工作台示意图;
19.图4为本实用新型安装工作台测试剖面示意图;
20.图5为本实用新型整体安装示意图。
21.图中标号:1、支撑架;11、底座;12、外接模块;13、镶嵌槽;2、旋转臂;21、激光转速传感器;22、扣槽;3、安装工作台;31、防振平台;311、安装槽;312、限位板;313、减振弹簧;32、镶嵌座;321、限位槽;322、锁紧螺丝。
具体实施方式
22.实施例一,由图1-5给出,一种无人直升机螺旋桨转速检测装置,包括支撑架1,支撑架1底部安装有底座11,且支撑架1上部两侧端开设有两个镶嵌槽13,两个镶嵌槽13内部一侧均转轴活动连接有旋转臂2,且两个旋转臂2远离转轴的上端一侧均开设有检测槽,并两个检测槽中安装有激光转速传感器21,两个旋转臂2的对外端,靠近激光转速传感器21位置处开设有扣槽22,支撑架1上端安装有安装工作台3;支撑架1上部前端安装有外接模块12,且外接模块12与两个激光转速传感器21电性连接,外接模块12为usb接口端,并与外部计算机数据连接通电;两个激光转速传感器21发射端面向外部安装在安装工作台3上的无人直升机螺旋叶片,且在无人直升机螺旋叶片上粘贴有反光膜片;
23.其中,将两个旋转臂2转动打开,将手扣入到扣槽22中,带动旋转臂2使力,旋转臂2通过转轴缓慢转动,与镶嵌槽13保持垂直,再将螺旋桨其中一个桨叶上粘贴反光膜片接下来,将数据线插入到外机模块中,并对两个激光转速传感器21供电,开始检测,控制无人直升机螺旋桨转动,连接桨叶开始转动,两个激光转速传感器21发射激光照射到旋转的桨叶上,并每次通过经过的反光膜片接收信号,进行转速检测,检测的信号通过外接模块12发送到外部计算机上显示数值,方便使用者通过数值计算出无人直升机螺旋桨转动是否正常。
24.实施例二,在实施例一的基础上,安装工作台3包括防振平台31和镶嵌座32,防振
平台31上端开设有安装槽311,且安装槽311内底部安装有多个减振弹簧313,多个减振弹簧313上端安装有限位板312,且限位板312上端对称安装有两个镶嵌座32;
25.其中,无人直升机安装在防振平台31的限位板312上,在转动过程中产生的振动,传递到多个减振弹簧313上,多个减振弹簧313收缩反弹,将产生的振动力抵消,防止影响两个旋转臂2上的导致激光转速传感器21抖动,提高检测精度。
26.本实施例中,镶嵌座32上端开设有镶嵌槽321,且镶嵌座32侧端螺纹连接有多个锁紧螺丝322,并贯穿到镶嵌槽321中;镶嵌座32的镶嵌槽321中嵌入有外部无人直升机脚架,并通过多个锁紧螺丝322螺纹限位;
27.其中,人工将无人直升机搬运至安装工作台3上,并将两个脚架分别插入到两个镶嵌座32的限位槽321中,然后将两个镶嵌座32上的锁紧螺丝322转动拧紧,防止工作时出现位移掉落。
28.工作原理:
29.使用时,将无人直升机安装到装置上,人工将无人直升机搬运至安装工作台3上,并将两个脚架分别插入到两个镶嵌座32的限位槽321中,然后将两个镶嵌座32上的锁紧螺丝322转动拧紧;
30.然后,将两个旋转臂2转动打开,将手扣入到扣槽22中,带动旋转臂2使力,旋转臂2通过转轴缓慢转动(旋转臂2与镶嵌槽13连接较紧,摩擦力较大),与镶嵌槽13保持垂直,再将螺旋桨其中一个桨叶上粘贴反光膜片;
31.接下来,将数据线插入到外机模块中,并对两个激光转速传感器21(rols-p)供电,开始检测,控制无人直升机螺旋桨转动,连接桨叶开始转动,两个激光转速传感器21发射激光照射到旋转的桨叶上,并每次通过经过的反光膜片接收信号,进行转速检测,检测的信号通过外接模块12发送到外部计算机上显示数值,方便使用者通过数值计算出无人直升机螺旋桨转动是否正常;
32.无人直升机安装在防振平台31的限位板312上,在转动过程中产生的振动,传递到多个减振弹簧313上,多个减振弹簧313收缩反弹,将产生的振动力抵消,防止影响两个旋转臂2上的导致激光转速传感器21抖动,提高检测精度。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。