技术特征:
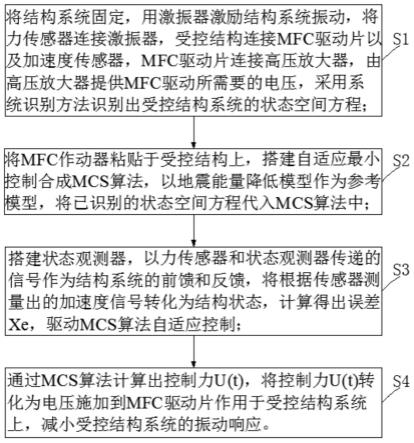
1.基于mcs算法控制mfc驱动的主动控制方法,其特征在于,包括以下步骤:s1:将结构系统固定,用激振器激励结构系统振动,将力传感器连接激振器,受控结构连接mfc驱动片以及加速度传感器,mfc驱动片连接高压放大器,由高压放大器提供mfc驱动所需要的电压,采用系统识别方法识别出受控结构系统的状态空间方程;s2:将mfc作动器粘贴于受控结构上,搭建自适应最小控制合成mcs算法,以地震能量降低模型作为参考模型,将已识别的状态空间方程代入mcs算法中;s3:搭建状态观测器,以力传感器和状态观测器传递的信号作为结构系统的前馈和反馈,将根据传感器测量出的加速度信号转化为结构状态,计算得出误差xe,驱动mcs算法自适应控制;s4:通过mcs算法计算出控制力u(t),将控制力u(t)转化为电压施加到mfc驱动片作用于受控结构系统上,减小受控结构系统的振动响应。2.根据权利要求1所述的基于mcs算法控制mfc驱动的主动控制方法,其特征在于,所述s1步骤的所述采用系统识别方法识别出受控结构系统的状态空间方程的方法包括:采用matlab中的system identification工具箱,将力传感器采集到的信号和mfc驱动片的出力作为激励力施加给结构系统的力信号作为输入,加速度传感器采集到的信号作为输入,根据mfc驱动片的最大出力和目标控制效果,将地震加速度时程乘以折减系数k
d
=0.6,参考输入r(t)的表达式为:r(t)=k
d
d(t),识别出受控结构系统的准确率大于90%的传递函数,再将传递函数转化为结构系统的状态空间方程,作为受控结构系统的运动特性。3.根据权利要求1所述的基于mcs算法控制mfc驱动的主动控制方法,其特征在于,所述s2步骤的所述搭建自适应最小控制合成mcs算法的方法包括:搭建最小控制合成算法框架,将含有受控结构参数的状态空间方程代入所述最小控制合成算法框架中;最小控制合成算法框架的搭建分为被控模型、参考模型以及未控模型三个部分,其中,参考模型使用地震能量降低模型,未控模型作为减振效果的对比;计算出在mcs算法下的控制力u(t),再将控制力u(t)作用于被控模型上;由传感器和状态观测器检测出结构系统的状态,得到误差,以此形成闭环控制。4.根据权利要求1所述的基于mcs算法控制mfc驱动的主动控制方法,其特征在于,所述s2步骤的将已识别的状态空间方程代入mcs算法中的方法包括:计算出mfc应当施加在结构系统上的驱动力,根据宏纤维复合平板结构的作动方程,得到长边方向的出力与电压的关系:f
x
=k*v;其中,k为与受控结构系统的尺寸和材料特性有关的系数,mfc的出力f
x
与所提供的电压v呈线性关系,将控制力转化为电压施加在mfc上,控制mfc对受控结构系统输出的驱动力。5.根据权利要求1所述的基于mcs算法控制mfc驱动的主动控制方法,其特征在于,所述s3步骤的搭建状态观测器的方法包括:以输入u和输出y为状态观测器的输入量,通过极点配置的方法,得到反馈增益矩阵k,通过调节状态观测器的参数调整估计值渐近于x的速度,将得到的代替x作为结构系统的状态,计算出x
e
=x
m
(t)-x(t)。6.根据权利要求1所述的基于mcs算法控制mfc驱动的主动控制方法,其特征在于,所述
s4步骤的所述通过mcs算法计算出控制力u(t)的方法包括:在matlab/simulink中搭建自适应最小控制合成mcs算法,将参考模型的状态x
m
(t)与被控模型的状态x(t)作差xe(t)=xm(t)-x(t),得到误差值xe(t),由xe(t)驱动mcs算法计算得出前馈增益k
r
和反馈增益k,再使用公式u(t)=k
r
r(t) kx(t)计算出控制力u(t)。7.根据权利要求1所述的基于mcs算法控制mfc驱动的主动控制方法,其特征在于,所述s4步骤的将控制力u(t)转化为电压施加到mfc驱动片作用于受控结构系统上的方法包括:根据mfc的出力特点和布置位置,求出作动器位置矩阵bs,再将bs转化为模态下的矩阵b,代入到mcs算法中,mcs算法计算得出的控制力u(t)为mfc应当输出的最优驱动力,mcs算法中的前馈增益由公式:计算得出;反馈增益由公式:计算得出;其中,比例因子α和β为10倍、1倍或者1/10倍的关系,y
e
为系统误差输出信号,τ为积分变量,t为矩阵转置,x是状态响应,r是外部激励。8.基于mcs算法控制mfc驱动的主动控制系统,其特征在于,执行如权利要求1-7任一项所述的基于mcs算法控制mfc驱动的主动控制方法,包括:状态空间方程转化模块:采用系统识别方法识别出受控结构系统的状态空间方程;搭建mcs算法模块:用于搭建自适应最小控制合成mcs算法,以地震能量降低模型作为参考模型,将已识别的状态空间方程代入mcs算法中;搭建状态观测器模块:用于以力传感器和状态观测器传递的信号作为结构系统的前馈和反馈,将根据传感器测量出的加速度信号转化为结构状态,计算得出误差xe,驱动mcs算法自适应控制;控制力模块:用于通过mcs算法计算出控制力u(t),将控制力u(t)转化为电压施加到mfc驱动片作用于受控结构系统上,减小受控结构系统的振动响应。9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现权利要求1-7任一项所述的基于mcs算法控制mfc驱动的主动控制方法的步骤。10.一种计算机设备,所述计算机设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-7任一项所述的基于mcs算法控制mfc驱动的主动控制方法的步骤。
技术总结
本发明提供基于MCS算法控制MFC驱动的主动控制方法及系统,所述方法包括以下步骤:采用系统识别方法识别出受控结构系统的状态空间方程;搭建自适应最小控制合成MCS算法,以地震能量降低模型作为参考模型,将已识别的状态空间方程代入MCS算法中;搭建状态观测器,将根据传感器测量出的加速度信号转化为结构状态,计算得出误差Xe,驱动MCS算法自适应控制;计算出控制力U(t)并转化为电压施加到MFC驱动片作用于受控结构系统上,减小受控结构系统的振动响应。本发明将MCS计算出的控制电压施加到MFC上,利用MFC的逆压电效应对受控结构进行减振,使受控结构的振动响应逐渐接近于参考模型,达到目标减振效果。到目标减振效果。到目标减振效果。
技术研发人员:涂建维 周欣茹 阮泽聪
受保护的技术使用者:武汉理工大学
技术研发日:2022.08.22
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。