1.本实用新型属于通用机械装备技术领域,具体地,涉及一种圆柱状零件同向理料下料装置。
背景技术:
2.自动生产线是指由自动化机器体系实现零件工艺过程的一种生产组织形式。它是在连续流水线的进一步发展的基础上形成的。在一种圆柱状零件的自动生产线上,在装配之前要求各个零件按照指定的方向整齐排列,圆柱状零件的方向和位置精度不仅决定着装配过程是否顺利,安装是否可靠,有些还直接影响零件的相位偏差等性能指标,因此对圆柱状零件的方向和位置的精确测量非常重要。
3.此类圆柱状零件生产制作完成后,依次摆放在托盘上,通过自动化的方向检测装置,需要将托盘上的零件逐一的放入方向检测装置进行正反放置方向的检测,检测零件的正反方向后,将零件调整为同方向,即可实现下料,重新放回至托盘内,以供后续生产过程使用。
4.但是,目前还没有专门的针对此类圆柱状零件方向调整后进行下料的装置,只能通过人工拿取装盘,造成大量人力资源的浪费。
技术实现要素:
5.实用新型目的:本实用新型的目的是提供一种圆柱状零件同向理料下料装置,解决了现有技术中的圆柱状零件进行正反方向的位置调整后,如何将人工从繁重的下料摆盘中解放出来,实现自动下料的问题。
6.技术方案:本实用新型提供了一种圆柱状零件同向理料下料装置,包括横向搬移模组、检测工位一、检测工位二、翻转摆盘模组、摆放横移直线模组、摆盘工装和下料机器人,所述横向搬移模组、检测工位一、检测工位二、翻转摆盘模组和摆放横移直线模组均设置在机台上,所述摆盘工装和摆放横移直线模组的滑块连接,所述检测工位一、检测工位二和翻转摆盘模组处于同一直线上,所述横向搬移模组位于检测工位一、检测工位二和翻转摆盘模组所在直线的一侧,所述横向搬移模组可将检测工位一内的零件转运至检测工位二内,所述翻转摆盘模组可将检测工位二内的零件转运至摆盘工装内。本实用新型的圆柱状零件同向理料下料装置,设置的检测工位一和检测工位二这两个检测工位,能够对零件方向不合格的进行复检,提高了零件检测的准确性,当旋转摆盘模组,将检测过的产品摆满(摆盘区域)4个,由纵向移动模组,将摆盘区域移动到夹具夹取区域,由机械臂工装夹具夹取检测过的产品,整个流程结束。
7.进一步的,上述的圆柱状零件同向理料下料装置,所述横向搬移模组包括横向搬移支撑座一、横向搬移驱动气缸、横向搬移滑板、两条平行设置的横向搬移导轨和横向搬移组件,所述横向搬移支撑座一固定设置在机台上,所述横向搬移驱动气缸和两条平行设置的横向搬移导轨均固定设置在横向搬移支撑座一上,所述横向搬移驱动气缸的活塞杆和横
向搬移滑板的一端连接,所述横向搬移滑板和两条平行设置的横向搬移导轨滑动连接,所述横向搬移组件设置在横向搬移滑板上。设置的横向搬移模组能够驱动横向搬移组件在检测工位一、检测工位二之间切换,从而将零件从检测工位一转运至检测工位二。
8.进一步的,上述的圆柱状零件同向理料下料装置,所述检测工位二位置处设有ccd检测相机。ccd检测相机能够对检测工位一检测不合格的零件进行第二次检测,进一步确认零件的方向。
9.进一步的,上述的圆柱状零件同向理料下料装置,所述横向搬移组件包括置位调整支撑座、置位调整升降驱动气缸、置位调整竖直滑板、置位调整旋转驱动电机和置位调整夹爪气缸,所述置位调整升降驱动气缸固定设置在置位调整支撑座上,并且置位调整升降驱动气缸的活塞杆和置位调整竖直滑板连接,所述置位调整竖直滑板和置位调整支撑座滑动连接,所述置位调整旋转驱动电机和置位调整竖直滑板连接,所述置位调整夹爪气缸和置位调整旋转驱动电机连接,所述置位调整夹爪气缸可夹持四工位分度盘上的零件。横向搬移组件能够自动的夹持住检测工位一内的工件,然后移动到检测工位二位置处,并且将零件放入检测工位二内,实现自动化的作业。
10.进一步的,上述的圆柱状零件同向理料下料装置,所述置位调整支撑座上设有置位竖直导轨,所述置位调整竖直滑板上连接有置位竖直导向滑块,所述置位竖直导向滑块和置位竖直导轨滑动连接。置位竖直导向滑块和置位竖直导轨的滑动连接结构,提高了竖直移动的稳定性。
11.进一步的,上述的圆柱状零件同向理料下料装置,所述摆盘工装上设有一组零件放置槽,所述零件放置槽内设有零件。零件放置槽呈圆柱形设置,这样圆柱状零件插入零件放置槽内,能够将圆柱状零件稳定的限定在零件放置槽内。
12.进一步的,上述的圆柱状零件同向理料下料装置,所述翻转摆盘模组包括翻转摆盘支撑座、翻转摆盘竖直驱动气缸、翻转摆盘竖直导轨、翻转摆盘滑块、摆盘旋转驱动气缸、翻转摆盘夹爪气缸、摆盘水平置位调整组件和翻转摆盘竖直滑板,所述翻转摆盘支撑座固定设置在机台上,所述摆盘水平置位调整组件设置在翻转摆盘支撑座上,所述翻转摆盘竖直驱动气缸设置在摆盘水平置位调整组件上,所述翻转摆盘竖直驱动气缸和翻转摆盘竖直滑板连接,所述翻转摆盘竖直导轨设置在摆盘水平置位调整组件上,所述翻转摆盘滑块和翻转摆盘竖直滑板固定连接,所述翻转摆盘滑块和翻转摆盘竖直导轨滑动连接,所述摆盘旋转驱动气缸固定设置在翻转摆盘滑块上,所述翻转摆盘夹爪气缸和摆盘旋转驱动气缸连接,所述翻转摆盘夹爪气缸可夹持检测工位二位置处的零件。翻转摆盘模组通过竖直以及旋转运动的协同动作,能够从检测工位二位置处夹持零件旋转后放入摆盘工装内,代替了手工作业,设计巧妙。
13.进一步的,上述的圆柱状零件同向理料下料装置,所述摆盘水平置位调整组件包括摆盘水平驱动气缸、摆盘水平支撑板、摆盘水平导轨、摆盘水平滑块和摆盘水平滑板,所述摆盘水平支撑板和翻转摆盘支撑座固定连接,所述摆盘水平驱动气缸设置在摆盘水平支撑板上,所述摆盘水平导轨设置在摆盘水平支撑板的竖直侧壁上,所述摆盘水平滑块和摆盘水平滑板固定连接,所述摆盘水平滑块和摆盘水平导轨滑动连接,所述翻转摆盘竖直驱动气缸和翻转摆盘竖直导轨均设置在摆盘水平滑板上。摆盘水平驱动气缸的活塞杆伸出或者收回,能够带动翻转摆盘模组在检测工位二和摆盘工装之间进行切换,从而进行下料摆
放。
14.进一步的,上述的圆柱状零件同向理料下料装置,所述下料机器人包括下料机器人本体、下料支撑架、零件下料驱动气缸、一组零件下料夹爪气缸和夹爪气缸安装板,所述下料支撑架和下料机器人本体连接,所述零件下料驱动气缸固定设置在下料支撑架的活塞杆和夹爪气缸安装板连接,所述一组零件下料夹爪气缸设置在夹爪气缸安装板上。下料机器人本体可根据生产现场的需要,灵活选择市面上的三轴、四轴、五轴或者六轴机器人,驱动一组零件下料夹爪气缸移动到摆盘工装上进行零件的下料。
15.进一步的,上述的圆柱状零件同向理料下料装置,所述下料支撑架上设有一组下料导向套筒,所述夹爪气缸安装板上设有一组下料导向柱,所述一组下料导向套筒和一组下料导向柱一一对应设置,并且下料导向柱和下料导向套筒滑动连接,所述夹爪气缸安装板的下端面上设有一组限位柱。一组限位柱能够避免下料机器人移动超过行程,造成机器损坏,提高了安全性。
16.上述技术方案可以看出,本实用新型具有如下有益效果:本实用新型所述的圆柱状零件同向理料下料装置,设置了双检测工位,检测工位一负责检测待测产品置位方向,待测零件为正,通过,待测零件置位为反,触发光电开关,不合格旋转到下一工位第二检测工位,由第二检测工位对该不合格零件重新置位,置位为正;第二检测工位负责拍照检测待测产品正反,进一步保证待测产品置位是否正确,零件方向防止正确后,由翻转摆盘机构将产品置位正确,并且摆放在待取区域,通过机器人自动将零件进行下料。
附图说明
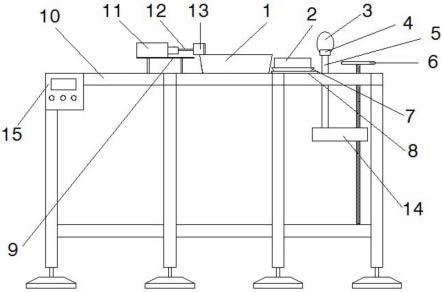
17.图1为本实用新型所述圆柱状零件同向理料下料装置的结构示意图一;
18.图2为本实用新型所述圆柱状零件同向理料下料装置的俯视图;
19.图3为本实用新型所述圆柱状零件同向理料下料装置的结构示意图二;
20.图4为本实用新型所述横向搬移模组的结构示意图;
21.图5为本实用新型所述圆柱状零件同向理料下料装置的局部结构示意图;
22.图6为本实用新型所述翻转摆盘模组的结构示意图;
23.图7为本实用新型所述摆放横移直线模组、摆盘工装和下料机器人的结构示意图;
24.图8为本实用新型所述下料机器人的结构示意图一;
25.图9为本实用新型所述下料机器人的结构示意图二。
26.图中:横向搬移模组301、检测工位一302、检测工位二303、翻转摆盘模组304、摆放横移直线模组305、摆盘工装306、下料机器人307、横向搬移支撑座一308、横向搬移驱动气缸309、横向搬移滑板310、横向搬移导轨311、横向搬移组件312、ccd检测相机313、零件放置槽314、翻转摆盘支撑座315、翻转摆盘竖直驱动气缸316、翻转摆盘竖直导轨317、翻转摆盘滑块318、摆盘旋转驱动气缸319、翻转摆盘夹爪气缸320、摆盘水平置位调整组件321、翻转摆盘竖直滑板322、摆盘水平驱动气缸323、摆盘水平支撑板324、摆盘水平导轨325、摆盘水平滑块326、摆盘水平滑板327、下料支撑架328、零件下料驱动气缸329、零件下料夹爪气缸330和夹爪气缸安装板331、下料导向套筒332、下料导向柱333、限位柱334。
具体实施方式
27.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
28.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
29.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上,除非另有明确的限定。
30.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
31.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
实施例
32.如图1-3所示的圆柱状零件同向理料下料装置,包括横向搬移模组301、检测工位一302、检测工位二303、翻转摆盘模组304、摆放横移直线模组305、摆盘工装306和下料机器人307,所述横向搬移模组301、检测工位一302、检测工位二303、翻转摆盘模组304和摆放横移直线模组305均设置在机台上,所述摆盘工装306和摆放横移直线模组305的滑块连接,所述检测工位一302、检测工位二303和翻转摆盘模组304处于同一直线上,所述横向搬移模组301位于检测工位一302、检测工位二303和翻转摆盘模组304所在直线的一侧,所述横向搬移模组301可将检测工位一302内的零件转运至检测工位二303内,所述翻转摆盘模组304可将检测工位二303内的零件转运至摆盘工装306内。并且所述检测工位二303位置处设有ccd检测相机313。所述摆盘工装306上设有一组零件放置槽314,所述零件放置槽314内设有零件。
33.如图4所示的横向搬移模组301包括横向搬移支撑座一308、横向搬移驱动气缸309、横向搬移滑板310、两条平行设置的横向搬移导轨311和横向搬移组件312,所述横向搬
移支撑座一308固定设置在机台上,所述横向搬移驱动气缸309和两条平行设置的横向搬移导轨311均固定设置在横向搬移支撑座一308上,所述横向搬移驱动气缸309的活塞杆和横向搬移滑板310的一端连接,所述横向搬移滑板310和两条平行设置的横向搬移导轨311滑动连接,所述横向搬移组件312设置在横向搬移滑板310上。
34.上述结构中,横向搬移组件312包括置位调整支撑座215、置位调整升降驱动气缸216、置位调整竖直滑板217、置位调整旋转驱动电机218和置位调整夹爪气缸219,所述置位调整升降驱动气缸216固定设置在置位调整支撑座215上,并且置位调整升降驱动气缸216的活塞杆和置位调整竖直滑板217连接,所述置位调整竖直滑板217和置位调整支撑座215滑动连接,所述置位调整旋转驱动电机218和置位调整竖直滑板217连接,所述置位调整夹爪气缸219和置位调整旋转驱动电机218连接,所述置位调整夹爪气缸219可夹持四工位分度盘201上的零件。
35.其中,所述置位调整支撑座215上设有置位竖直导轨220,所述置位调整竖直滑板217上连接有置位竖直导向滑块221,所述置位竖直导向滑块221和置位竖直导轨220滑动连接。
36.如图5-7所示的翻转摆盘模组304包括翻转摆盘支撑座315、翻转摆盘竖直驱动气缸316、翻转摆盘竖直导轨317、翻转摆盘滑块318、摆盘旋转驱动气缸319、翻转摆盘夹爪气缸320、摆盘水平置位调整组件321和翻转摆盘竖直滑板322,所述翻转摆盘支撑座315固定设置在机台上,所述摆盘水平置位调整组件321设置在翻转摆盘支撑座315上,所述翻转摆盘竖直驱动气缸316设置在摆盘水平置位调整组件321上,所述翻转摆盘竖直驱动气缸316和翻转摆盘竖直滑板322连接,所述翻转摆盘竖直导轨317设置在摆盘水平置位调整组件321上,所述翻转摆盘滑块318和翻转摆盘竖直滑板322固定连接,所述翻转摆盘滑块318和翻转摆盘竖直导轨317滑动连接,所述摆盘旋转驱动气缸319固定设置在翻转摆盘滑块318上,所述翻转摆盘夹爪气缸320和摆盘旋转驱动气缸319连接,所述翻转摆盘夹爪气缸320可夹持检测工位二303位置处的零件。
37.上述结构中,摆盘水平置位调整组件321包括摆盘水平驱动气缸323、摆盘水平支撑板324、摆盘水平导轨325、摆盘水平滑块326和摆盘水平滑板327,所述摆盘水平支撑板324和翻转摆盘支撑座315固定连接,所述摆盘水平驱动气缸323设置在摆盘水平支撑板324上,所述摆盘水平导轨325设置在摆盘水平支撑板324的竖直侧壁上,所述摆盘水平滑块326和摆盘水平滑板327固定连接,所述摆盘水平滑块326和摆盘水平导轨325滑动连接,所述翻转摆盘竖直驱动气缸316和翻转摆盘竖直导轨317均设置在摆盘水平滑板327上。
38.如图8、9所示的下料机器人307包括下料机器人本体、下料支撑架328、零件下料驱动气缸329、一组零件下料夹爪气缸330和夹爪气缸安装板331,所述下料支撑架328和下料机器人本体连接,所述零件下料驱动气缸329固定设置在下料支撑架328上,并且零件下料驱动气缸329的活塞杆和夹爪气缸安装板331连接,所述一组零件下料夹爪气缸330设置在夹爪气缸安装板331上。所述下料支撑架328上设有一组下料导向套筒332,所述夹爪气缸安装板331上设有一组下料导向柱333,所述一组下料导向套筒332和一组下料导向柱333一一对应设置,并且下料导向柱333和下料导向套筒332滑动连接,所述夹爪气缸安装板331的下端面上设有一组限位柱334。
39.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技
术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进,这些改进也应视为本实用新型的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。