1.本发明涉及医疗设备技术领域,具体涉及一种血管介入手术机器人从端执行器装置。
背景技术:
2.微创血管手术是在x射线影像或其他灰度图像的监控和引导下,利用手工完成导管、导管/导丝、微导管和气囊等手术器械的插入工作,由于现有的导管前端的弯曲半径固定,以及人体内血管存在弯曲狭长、不规则、分支多等特征,医生在进行插入工作时存在一定的风险性,且手术操作复杂、时间长,身体疲劳和手工操作不稳定等因素均会影响手术质量。
3.为解决上述问题,现有技术通常通过微创血管介入手术机器人进行导管/导丝的插入工作,其中执行装置具备递送、捻旋、夹持功能,导管/导丝递送过程通常为设置两处夹持部,其中一个夹持部起到支撑的作用,另一夹持座对导管进行固定并带动导管前移一段距离,经过一段距离的前移之后,两个夹持部靠近,此时需要通过处于前端的夹持部对导管进行夹持,处于后端的夹持部后移,以便于进行下一次的导管递进,导管递进过程存在等待递进的过程,导致手术时间较长,可能造成对手术最终结果的影响;
4.因此,现有技术存在以下技术问题,导管递进过程存在等待下段递进的过程,导致手术时间较长,造成对手术最终结果的影响。
技术实现要素:
5.为此,本发明提供一种血管介入手术机器人从端执行器装置,有效的解决了现有技术中的导管递进过程存在等待下段递进的过程导致手术时间较长进而造成对手术最终结果的影响的问题。
6.为解决上述技术问题,本发明具体提供下述技术方案:一种血管介入手术机器人从端执行器装置,具备:
7.夹持前端,其上安装有导丝,所述夹持前端用于固定导丝以及带动导丝旋转;
8.连续推进机构,设置在所述夹持前端的后方,所述连续推进机构用于对导丝进行夹持,并交替更换夹持位置带动导丝前移,以连续带动导丝前进;
9.推进驱动结构,连接在所述连续推进机构底部,所述推进驱动结构用于带动所述连续推进机构中对导丝夹持的结构前移,以及带动所述连续推进机构中解除对导丝夹持的结构后移;
10.后移驱动件,设置在所述夹持前座内,所述后移驱动件用于通过所述夹持前端内对导丝固定的结构带动所述导丝后移;
11.力反馈元件,设置在连续推进机构内,所述力反馈元件用于检测所述导丝的受力情况,所述后移驱动件用于根据所述力反馈元件的检测结果驱动,以带动所述导丝后移。
12.进一步地,所述连续推进机构包括前推进座、后推进座、设置在所述前推进座内的
第二夹持部件以及设置在所述后推进座内的第三夹持部件;
13.所述第二夹持部件和所述第三夹持部件均用于对所述导丝进行夹持,所述推进驱动结构设置在所述前推进座和所述后推进座底部。
14.进一步地,所述第二夹持部件包括设置在所述前推进座内的第一上夹持座和第一下夹持座、设置在所述第一上夹持座侧边的第一上螺纹杆、设置在所述第一下夹持座侧边的第一下螺纹杆以及设置在所述前推进座内的第一驱动电机;
15.所述第一上螺纹杆的下端与所述第一下螺纹杆的上端连接,所述第一下螺纹杆连接在所述第一驱动电机的输出端,所述第一上螺纹杆的螺纹方向与所述第一下螺纹杆的螺纹方向相反。
16.进一步地,所述第三夹持部件包括设置在所述后推进座内的第二上夹持座和第二下夹持座、设置在所述第二上夹持座侧边的第二上螺纹杆、设置在所述第二下夹持座侧边的第二下螺纹杆以及设置在所述后推进座内的第二驱动电机;
17.所述第二上螺纹杆的下端与所述第二下螺纹杆的上端连接,所述第二下螺纹杆连接在所述第二驱动电机的输出端,所述第二上螺纹杆的螺纹方向与所述第二下螺纹杆的螺纹方向相反;
18.所述第一上夹持座和所述第一下夹持座之间以及所述第二上夹持座和所述第二下夹持座之间均设置有硅胶夹持片。
19.进一步地,所述推进驱动结构包括安装底座、设置在所述安装底座上的直线槽、设置在所述直线槽内的第三驱动电机、连接在所述第三驱动电机输出端的后螺纹杆以及设置在所述后螺纹杆端部的前螺纹杆;
20.所述夹持前座设置在所述安装底座上,所述前螺纹杆和所述后螺纹杆之间设置有限位墙体,所述前螺纹杆和所述后螺纹杆之间连接设置有传动杆,所述传动杆穿过所述限位墙体,所述后推进座和所述前推进座均滑动设置在所述直线槽内,所述后螺纹杆贯穿设置在所述后推进座底部,所述前螺纹杆贯穿设置在所述前推进座底部。
21.进一步地,所述夹持前端包括设置在所述夹持前座上的第一夹持部件以及设置在所述第一夹持部件侧边的捻旋部件;
22.所述捻旋部件包括设置在夹持前座上的旋转圆筒、设置在所述旋转圆筒上的齿轮环、设置在夹持前座内的安装槽以及设置在所述安装槽内的驱动齿轮;
23.所述驱动齿轮上连接有旋转电机,所述驱动齿轮连接在所述旋转电机的输出端,所述驱动齿轮与所述齿轮环啮合。
24.进一步地,所述夹持前座上设置有限位环座,所述齿轮环和所述旋转圆筒转动设置在所述限位环座内,所述旋转圆筒上设置有供所述导丝穿过的长槽,所述长槽内的设置有硅胶壁体,所述硅胶壁体与所述导丝接触。
25.进一步地,所述第一夹持部件包括设置在所述夹持前座上的夹持定位座、设置在所述夹持定位座内的第三上夹持座和第三下夹持座、设置在所述第三上夹持座和所述第三下夹持座侧边的连接螺纹杆以及设置在所述夹持定位座内的制动电机;
26.所述制动电机安装在所述第三下夹持座上,所述连接螺纹杆穿过所述第三下夹持座,且螺纹连接在所述第三上夹持座上,所述连接螺纹杆连接在所述制动电机的输出端。
27.进一步地,所述后移驱动件包括设置在所述夹持定位座内的滑动槽、设置在所述
滑动槽内且连接在所述第三下夹持座底部的滑动舱、设置在所述滑动舱上的驱动螺纹杆以及设置在所述滑动槽内的后移电机;
28.所述驱动螺纹杆连接在所述后移电机的输出端,所述驱动螺纹杆穿过所述滑动舱内壁。
29.进一步地,所述力反馈元件包括设置在所述前推进座和所述后推进座内的力感应座、设置在所述力感应座上的弹簧以及设置在所述前推进座和所述后推进座内的力传感器;
30.所述力感应座通过所述弹簧连接在所述前推进座和所述后推进座内,所述力传感器用于检测所述弹簧的压力,所述第一上夹持座、所述第一下夹持座、所述第二上夹持座和所述第二下夹持座均设置在所述力感应座内。
31.本发明与现有技术相比较具有如下有益效果:
32.本发明通过连续推进机构的交替推进动作实现对导丝的连续推进,节省了导丝递进过程的等待时间,提高了血管介入手术的效率,保证了手术的效果;另外,通过后移驱动件根据力反馈元件的检测结果带动导丝后移,避免导丝误入血管壁后持续对血管壁造成伤害,提高了手术的安全性。
附图说明
33.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
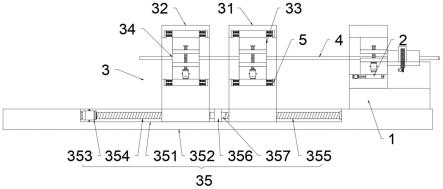
34.图1为本发明实施例提供的一种血管介入手术机器人从端执行器装置的结构示意图;
35.图2为本发明实施例中的第二夹持部件的侧面结构示意图;
36.图3为本发明实施例中的第二夹持部件的横截面结构示意图;
37.图4为本发明实施例中的第三夹持部件的侧面结构示意图;
38.图5为本发明实施例中的第三夹持部件的横截面结构示意图;
39.图6为本发明实施例中的第一夹持部件和捻旋部件的结构示意图;
40.图7为本发明实施例中的第一夹持部件的横截面结构示意图;
41.图8为本发明实施例中的捻旋部件的横截面结构示意图。
42.图中的标号分别表示如下:
43.1-夹持前座;2-后移驱动件;3-连续推进机构;4-导丝;5-力反馈元件;
44.11-第一夹持部件;12-捻旋部件;
45.21-滑动槽;22-滑动舱;23-驱动螺纹杆;24-后移电机;
46.31-前推进座;32-后推进座;33-第二夹持部件;34-第三夹持部件;35-推进驱动结构;
47.51-力感应座;52-弹簧;53-力传感器;
48.111-夹持定位座;112-第三上夹持座;113-第三下夹持座;114-连接螺纹杆;115-第三驱动电机;
49.121-旋转圆筒;122-齿轮环;123-安装槽;124-驱动齿轮;125-旋转电机;126-限位环座;127-长槽;128-硅胶壁体;
50.331-第一上夹持座;332-第一下夹持座;333-第一上螺纹杆;334-第一下螺纹杆;335-第一驱动电机;
51.341-第二上夹持座;342-第二下夹持座;343-第二上螺纹杆;344-第二下螺纹杆;345-第二驱动电机;346-硅胶夹持片;
52.351-直线槽;352-安装底座;353-第三驱动电机;354-后螺纹杆;355-前螺纹杆;356-限位墙体;357-传动杆。
具体实施方式
53.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
54.如图1所示,本发明提供了一种血管介入手术机器人从端执行器装置,具备夹持前端1、连续推进机构3、推进驱动结构35、后移驱动件2和力反馈元件5,其中,夹持前端1,其上安装有导丝4,夹持前端1用于固定导丝4以及带动导丝4旋转;连续推进机构3,设置在夹持前端1的后方,连续推进机构3用于对导丝4进行夹持,并交替更换夹持位置带动导丝4前移,以连续带动导丝4前进;推进驱动结构35,连接在连续推进机构3底部,推进驱动结构35用于带动连续推进机构3中对导丝4夹持的结构前移,以及带动连续推进机构3中解除对导丝4夹持的结构后移;后移驱动件2,设置在夹持前座13内,后移驱动件2用于通过夹持前端1内对导丝4夹持的结构带动导丝4后移;力反馈元件5,设置在连续推进机构3内,力反馈元件5用于检测导丝4的受力情况,后移驱动件2用于根据力反馈元件5的检测结果驱动,以带动导丝4后移。
55.上述实施例中,设置了连续推进机构3,通过连续推进机构3的交替推进动作实现对导丝4的连续推进,节省了导丝4递进过程的等待时间,提高了血管介入手术的效率,保证了手术的效果;另外设置了力反馈元件5,并且通过后移驱动件2根据力反馈元件5的检测结果驱动制动导丝4的前移递进动作,并带动导丝4后移一段距离,避免导丝4误入血管壁后持续对血管壁造成伤害,提高了手术的安全性。
56.本发明通过连续推进机构3对导丝4进行夹持,并交替更换夹持位置带动导丝4前移,以连续带动导丝4前进,连续推进机构3包括前推进座31、后推进座32、设置在前推进座31内的第二夹持部件33以及设置在后推进座31内的第三夹持部件34;第二夹持部件33和第三夹持部件34均用于对导丝4进行夹持,推进驱动结构35设置在前推进座31和后推进座32底部。
57.上述实施例中,第二夹持部件33在前推进座31带动导丝4前进的过程中对导丝4进行固定,第二夹持部件3采取以下优选实施例,如图2和图3所示,第二夹持部件33包括设置在前推进座31内的第一上夹持座331和第一下夹持座332、设置在第一上夹持座331侧边的第一上螺纹杆333、设置在第一下夹持座332侧边的第一下螺纹杆334以及设置在前推进座31内的第一驱动电机335;第一上螺纹杆333的下端与第一下螺纹杆334的上端连接,第一下
螺纹杆334连接在第一驱动电机335的输出端,第一上螺纹杆333的螺纹方向与第一下螺纹杆334的螺纹方向相反。
58.第二夹持部件33的夹持驱动过程为,初始状态下,第一上夹持座331和第一下夹持座332侧边存在一定的距离,第一驱动电机335驱动带动第一上螺纹杆333第一下螺纹杆334转动,在第一上螺纹杆333的转动作用下,第一上夹持座331逐渐下移,在第一下螺纹杆334的转动作用下,第一下夹持座332逐渐上移,直至第一上夹持座331和第一下夹持座332侧边贴合,此时第一上夹持座331和第一下夹持座332内部刚好对导丝4进行固定。
59.另外,本发明实施例通过第三夹持部件34在后推进座32带动导丝4前移的过程中对导丝4进行固定,第三夹持部件34与第二夹持部件33的结构一致,主要采取以下优选实施例,如图4和图5所示,第三夹持部件34包括设置在后推进座32内的第二上夹持座341和第二下夹持座342、设置在第二上夹持座341侧边的第二上螺纹杆343、设置在第二下夹持座342侧边的第二下螺纹杆344以及设置在后推进座32内的第二驱动电机345;第二上螺纹杆343的下端与第二下螺纹杆344的上端连接,第二下螺纹杆344连接在第二驱动电机345的输出端,第二上螺纹杆343的螺纹方向与第二下螺纹杆344的螺纹方向相反。
60.第三夹持部件34的夹持驱动过程为,初始状态下,第二上夹持座341和第二下夹持座342侧边存在一定的距离,第二驱动电机345驱动带动第二上螺纹杆343第二下螺纹杆344转动,在第二上螺纹杆343的转动作用下,第二上夹持座341逐渐下移,在第二下螺纹杆344的转动作用下,第二下夹持座342逐渐上移,直至第二上夹持座341和第二下夹持座342侧边贴合,此时第二上夹持座341和第二下夹持座342内部刚好对导丝4进行固定。
61.为了在带动导丝4前移的过程中对导丝4进行保护,在第一上夹持座331和第一下夹持座332之间以及第二上夹持座341和第二下夹持座342之间均设置有硅胶夹持片346,导丝4在前移过程中固定夹持在硅胶夹持片346内。
62.本发明实施例中,推进驱动结构35可实现前推进座31和后推进座32的交替前进动作,推进驱动结构35带动前推进座31和后推进座32做前进动作和后移动作,以使前推进座31和后推进座32交替向前递进导丝4,第二夹持部件33根据前推进座31的前进动作驱动对导丝4进行夹持以及根据前推进座31的后移动作进行复位以解除对导丝4的夹持,第三夹持部件34根据前推进座31的前进动作驱动对导丝4进行夹持以及根据前推进座31的后移动作进行复位以解除对导丝4的夹持。
63.本发明的推进驱动结构35主要采取以下优选实施例,推进驱动结构35包括安装底座352、设置在安装底座352上的直线槽351、设置在直线槽351内的第三驱动电机353、连接在第三驱动电机353输出端的后螺纹杆354以及设置在后螺纹杆354端部的前螺纹杆355;夹持前座13设置在安装底座352上,前螺纹杆355和后螺纹杆354之间设置有限位墙体356,前螺纹杆355和后螺纹杆354之间连接设置有传动杆357,传动杆357穿过限位墙体356,后推进座32和前推进座31均滑动设置在直线槽351内,后螺纹杆354贯穿设置在后推进座32底部,前螺纹杆355贯穿设置在前推进座31底部。
64.推动驱动结构35的驱动过程为,第三驱动电机353驱动带动后螺纹杆355转动,并且通过传动杆357带动前螺纹杆355转动,在后螺纹杆355的转动作用下带动后推进座32向前移动,在前螺纹杆355的转动作用下带动前推进座31向后移动,在第三驱动电机353驱动的过程中,前推进座31和后推进座32的移动方向总是相反的,在前推进座31和后推进座32
向前移动至直形槽351内限位位置时,第三驱动电机353再反向驱动,带动前推进座31和后推进座32按照与之前运行方向相反的方向移动;另外,在前推进座31向前移动的过程中,第二夹持部件33对导丝4进行固定,后移的过程则使第二夹持部件33解除对导丝4的固定,后推进座32上的第三夹持部件34的固定及解除固定时间与上述一致。
65.本发明通过夹持前端1固定导丝4以及带动导丝4旋转,夹持前端1包括设置在夹持前座13上的第一夹持部件11以及设置在第一夹持部件11侧边的捻旋部件12。
66.其中,在导丝4前移的过程中,通过捻旋部件12带动导丝进行旋转,本发明的捻旋部件12主要采取以下优选实施例,如图6和图8所示,捻旋部件12包括设置在夹持前座13上的旋转圆筒121、设置在旋转圆筒121上的齿轮环122、设置在夹持前座13内的安装槽123以及设置在安装槽123内的驱动齿轮124;驱动齿轮124上连接有旋转电机125,驱动齿轮124连接在旋转电机125的输出端,驱动齿轮124与齿轮环122啮合,夹持前座13上设置有限位环座126,齿轮环122和旋转圆筒121转动设置在限位环座126内,旋转圆筒121上设置有供导丝4穿过的长槽127,长槽127内的设置有硅胶壁体128,硅胶壁体128与导丝4接触。
67.捻旋部件12带动导丝4转动的过程为,旋转电机125驱动带动驱动齿轮124转动,从而带动齿轮环122转动,齿轮环122转动带动旋转圆筒121转动,从而带动长槽127内的导丝4转动。
68.本发明在夹持前座13上设置第一夹持部件11起到支撑导丝4和制动导丝4的作用,如图6和图7所示,第一夹持部件11包括设置在夹持前座13上的夹持定位座111、设置在夹持定位座111内的第三上夹持座112和第三下夹持座113、设置在第三上夹持座112和第三下夹持座113侧边的连接螺纹杆114以及设置在夹持定位座111内的制动电机115;制动电机115安装在第三下夹持座113上,连接螺纹杆114穿过第三下夹持座113,且螺纹连接在第三上夹持座112上,连接螺纹杆114连接在制动电机115的输出端。
69.第一夹持部件11的夹持驱动过程为,制动电机115驱动带动连接螺纹杆114转动,在连接螺纹杆114的转动作用下,第三上夹持座112逐渐下移至与第三下夹持座113贴合,此时可实现对导丝4的夹持,避免在力反馈元件5检测出异常时导丝4继续前进。
70.另外通过后移驱动件2带动导丝4向后移动,本发明的后移驱动件2主要采取以下优选实施例,如图6所示,后移驱动件2包括设置在夹持定位座111内的滑动槽21、设置在滑动槽21内且连接在第三下夹持座113底部的滑动舱22、设置在滑动舱22上的驱动螺纹杆23以及设置在滑动槽21内的后移电机24;驱动螺纹杆23连接在后移电机24的输出端,驱动螺纹杆23穿过滑动舱22内壁。
71.后移驱动件2的带动后移过程为,驱动后移电机24带动驱动螺纹杆23转动,在驱动螺纹杆23的转动作用下,滑动舱22逐渐向后移动从而带动第三下夹持座113向后移动,向后移动的过程中带动导丝4向后移动一段距离。
72.另外,本发明主要通过力反馈元件5对导丝4的受力进行分析,本发明的力反馈元件5主要采取以下优选实施例,如图2所示,力反馈元件5包括设置在前推进座31和后推进座32内的力感应座51、设置在力感应座51上的弹簧52以及设置在前推进座31和后推进座32内的力传感器53;力感应座53通过弹簧52连接在前推进座31和后推进座32内,力传感器53用于检测弹簧52的压力,第一上夹持座331、第一下夹持座332、第二上夹持座341和第二下夹持座342均设置在力感应座53内。
73.上述实施例中,力传感器53用于检测弹簧52的压力,当导丝4的端部受到血管壁止挡时,导丝4受到血管壁的支撑力,力感应座51相对后移,使得一侧的弹簧52受到挤压,弹簧52的压力改变,力传感器53处检测到的数据发生改变,实际应用过程中,可在上位机控制系统中设置相对的阈值,当力传感器53检测到的数据超出该阈值,则判定导丝4目前需要进行制动后移动作。
74.综上,本发明的主要实施过程为,将导丝4依次穿过第三夹持部件34、第二夹持部件33、第一夹持部件11和捻旋部件12,之后进入血管内,第三夹持部件34对导丝4进行夹持,驱动第三驱动电机353驱动带动后推进座32向前移动以及带动前推进座31向后移动,带动导丝4向前移动,移动一段距离之后,第三夹持部件34解除对导丝4的夹持,第二夹持部件33对导丝4进行夹持,此时,反向驱动第三驱动电机353带动后推进座32向后移动以及带动前推进座31向前移动,此过程带动导丝4向前移动,带动导丝4前移过程中,可通过驱动旋转电机125带动导丝4转动;上述过程通过力反馈元件5对导丝4的受力进行检测,当力传感器53检测到的数据超出某阈值,判定导丝4目前需要进行制动后移动作,此时紧急制动第三驱动电机353并驱动制动电机115带动第三上夹持座112逐渐下移至与第三下夹持座113贴合,实现对导丝4的夹持,之后驱动后移电机24带动第三下夹持座113向后移动,向后移动的过程中带动导丝4向后移动一段距离,实现导丝4的制动后移动作,对导丝4进行调整之后,继续进行导丝4的前移动作。
75.以上实施例仅为本技术的示例性实施例,不用于限制本技术,本技术的保护范围由权利要求书限定。本领域技术人员可以在本技术的实质和保护范围内,对本技术做出各种修改或等同替换,这种修改或等同替换也应视为落在本技术的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。