技术特征:
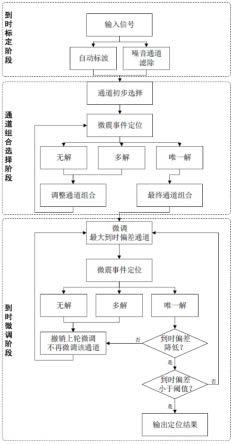
1.一种海量数据驱动的矿山微震震源自动定位方法,其特征在于,包括如下步骤:步骤一:从包含地震信号和非地震信号的大规模地震数据集stead中筛选出已标注的地震波形数据,并对每条波形数据进行预处理,构建地震波标定数据集;步骤二:先将地震波标定数据集中的波形数据随机按照预设比例分为训练集、验证集和测试集;再建立基于u-net结构的深度神经网络模型,并采用训练集对深度神经网络模型进行训练得到预训练标定模型;深度神经网络模型具有四个下采样阶段和四个上采样阶段,下采样过程用于从原始地震数据中提取用于到时标定的有效波形特征,上采样过程用于将特征扩展,并将其转换为每个p波到时、s波到时和噪声在每个数据点上的概率分布,下采样和上采样阶段对应的层之间均有跳跃连接;卷积核的大小设置为7,步长设置为4,卷积操作中,在每一层的前后进行填充,使输入和输出序列具有相同长度,并在深度神经网络模型的最后一层利用公式(1)采用softmax归一化指数函数输出p波到时、s波到时和噪声的概率;模型训练中使用的损失函数为交叉熵损失函数,具体地,使用公式(2)进行模型训练,并确保损失函数最小;式中,i取1,2,3,表示噪声、p波到时和s波到时,z(x)是最后一层的未缩放值;式中,p(x)为真实概率分布,q(x)为预测分布;步骤三:利用煤矿现场微震数据对预训练标定模型进行迁移学习,构造出适用于矿山微震信号的到时自动标定模型,以适应地下工程微震波形特征;s31:对煤矿现场微震数据中的部分样本进行人工手动标注,构建出包含p波到达时间、s波到达时间的微震信号样本数据集;s32:利用公式(3)在手动标注点的周围构造高斯分布掩膜,以减少数据集中标注错误的影响;式中,x为数据点,μ为人工标注到时位置,σ为标准差,取2d为标签宽度;s33:先对微震波标定数据集进行数据增广处理,得到增广后的数据集样本,再使用随机移位和信号堆叠的方式增加数据集样本的复杂度,最后,利用数据集样本对预训练标定模型进行迁移学习得到到时自动标定模型;步骤四:进行微震震源自动定位;s41:当一个微震事件发生时,通过多个台站分别对微震信号进行采集,并将获得的对应微震信号波形通过多个通道输入到到时自动标定模型中,利用到时自动标定模型对各个通道中微震信号波形数据进行p波和s波到时的自动标注作业;
同时,对本次震动事件的各个通道标注情况进行初步评估,排除其中没有检测到p波到时的通道和标注到时明显错误的通道;s42:根据公式(4)构建等速均质各向同性速度模型;式中,x0,y0,z0为微震事件位置,t0为微震事件起震时间,x
i
,y
i
,z
i
为第i个台站的坐标,t
i
为微震事件发生并被第i个台站探测得到p波的时间,v为p波在介质中的平均传播速度;s43:根据公式(5)利用最小化目标函数的形式对微震事件位置进行求解,以利用p波首次到达时间反演出微震震源的理论坐标值;式中,w
i
表示各台站观测值的权重系数,n表示用于标定事件p波到时的台站数量,p为参数,取1或2;s44:微震定位通道组合自动优化;s441:初步选择用于微震事件定位的初始通道组合;具体地,将可用通道按照到时先后和信噪比大小进行排序,并根据排序结果逐步扩大查找范围,当查找范围内的最大公共子集满足所需通道数量时,该子集即为初始通道组合;s442:基于初始通道组合进行微震定位结果的求解,微震定位结果有唯一解、多解和无解的三种情况;(1)对于微震定位结果为唯一解的情况,确认初始通道组合为最优组合,并通过通道的p波波速微调方法进行微调;(2)对于微震定位结果存在多解的情况,若通道数量少于n0个,则将剩余可用通道按照到时先后和信噪比大小进行排序,并从排序结果中的最大公共子集中顺次选出所需数量的通道,然后增加这部分通道生成新的通道组合,再进行微震定位求解,重复这一过程直至出现唯一解的情况,最后通过通道的p波波速微调方法进行微调;若通道数量不少于n0个,则删除末尾通道再进行下个通道的查找,查找过程和通道数量少于n0个时相同,重复以上优化过程直到不再出现多解时为止,生成新的通道组合再进行定位求解,直至出现唯一解的情况;(3)对于微震定位结果无解的情况,首先按照当前通道组合的排序结果删除末位通道,然后按照排序结果中的顺序增加下一个通道,使通道组合包含n0个通道,再进行新的一轮定位求解,若依然无解则重复实施该优化过程,直至得到有效解为止,最后通过通道的p波波速微调方法进行微调;所述通道的p波波速微调方法如下:每轮微调中,先选择偏差绝对值最大的通道作为微调目标通道,微调的步长设置为固定大小或根据偏差进行动态调整,以得到更新后的到时,然后进行微震事件定位,当且仅当得到唯一解且理论到时和实际到时最大偏差未增大时,该轮微调有效,否则撤销该轮微调,并在后续的微调中忽略该通道;经过多轮迭代不断进行微调,当最大偏差小于指定阈值时,输出最优解。2.根据权利要求1所述的一种海量数据驱动的矿山微震震源自动定位方法,其特征在于,在步骤四的s41中,台站的数量至少为4个。3.根据权利要求2所述的一种海量数据驱动的矿山微震震源自动定位方法,其特征在
于,在步骤二中,模型训练过程中深度学习的超参数设置如下:训练轮次为100,批大小为400,学习率为0.01,衰减率为0.8。4.根据权利要求3所述的一种海量数据驱动的矿山微震震源自动定位方法,其特征在于,在步骤三的s33中,迁移学习的超参数设置如下:训练轮次为40,批大小为400,学习率为0.001,衰减率为0.8。5.根据权利要求4所述的一种海量数据驱动的矿山微震震源自动定位方法,其特征在于,在步骤三的s31中,通过p波到达前2秒和p波到达后2秒的信号功率之比计算信噪比,利用公式(6)筛选出信噪比分布广的数据作为有效样本数据;式中,p
s
是信号的功率,p
n
是噪声的功率,lg为以10为底的对数,对于长度为n的数字信号序列x(n),其功率为6.根据权利要求5所述的一种海量数据驱动的矿山微震震源自动定位方法,其特征在于,在步骤四的s43中,采用pso算法或powell算法对公式(5)进行求解。7.根据权利要求6所述的一种海量数据驱动的矿山微震震源自动定位方法,其特征在于,在步骤四的s442中,n0为6。8.根据权利要求7所述的一种海量数据驱动的矿山微震震源自动定位方法,其特征在于,在步骤四的s442中,指定阈值为20ms。
技术总结
本发明提供了一种海量数据驱动的矿山微震震源自动定位方法,利用包含地震信号和非地震信号的大规模地震数据集构建微震波标定数据集;通过对地震波标定数据集的深度学习构建基于全卷积神经网络的预训练标定模型;利用煤矿现场微震数据对初始到时标定模型进行迁移学习,以构造出适用于矿山微震信号的到时自动标定模型;基于等速均质各向同性速度模型,利用优化算法反推到时误差,并通过多次迭代调整操作,实现了矿山微震自动精准定位作业。该方法抗噪性能好,对矿震数据具有更好的适应能力,可精确的对P波到时进行拾取,并能快速搜寻到最优微震事件位置,其对于提高微震事件定位精度、提升微震监测效能具有十分重要的意义。提升微震监测效能具有十分重要的意义。提升微震监测效能具有十分重要的意义。
技术研发人员:曹安业 杨旭 王常彬 李森 刘耀琪
受保护的技术使用者:中国矿业大学
技术研发日:2022.08.24
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。