一种基于orb算法的弓网运行状态检测方法
技术领域
1.本发明涉及弓网运行状态检测技术领域,更具体地说涉及一种基于orb算法的弓网运行状态检测方法。
背景技术:
2.受电弓和接触网(简称弓网)系统是轨道交通的重要组成部分,弓网受流质量直接决定列车安全、稳定、可靠运行。弓网长期复杂的机械和电气交变过程导致其故障居高不下,成为影响列车运行安全的薄弱环节。随着电气化铁路的快速发展,现场对弓网运行安全提出了更高要求,常利用弓网运行状态检测装置,检测弓网运行状态。
3.现有技术中,公开号为cn113295145a的专利,公开了一种弓网运行状态的检测系统及检测方法,其中,所述弓网运行状态的检测系统包括图像获取模块和智能检测模块,通过图像获取模块获取红外图像、可见光图像和线扫图像,结合智能检测模块基于所述红外图像和/或所述可见光图像,进行接触网动态尺寸检测和/或接触网红外温度检测和/或弓网燃弧检测和/或受电弓异常状态检测,并基于所述线扫图像进行受电弓以及接触网的硬点检测,实现了无接触式的弓网运行状态的全面检测,具有检测效率、检测精度和安全性高,且行车干扰性低的特点。
4.在列车运行时,接触线应位于弓网中的安全区域内,若超过该区域,则弓网运行就会出现故障。然而,上述专利公开的弓网运行状态检测方法,没有检测出接触线和弓网的位置,无法判断接触线是否位于弓网中的安全区域,因而无法判断弓网运行状态是否安全。
技术实现要素:
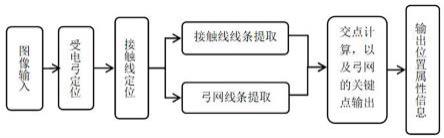
5.为了克服上述现有技术中存在的缺陷,本发明公开了一种基于orb算法的弓网运行状态检测方法,以解决上述无法判断接触线是否位于弓网中的安全区域、无法判断弓网运行状态是否安全的缺陷。本发明先定位弓网图像中的受电弓roi区域以及接触线roi区域,再提取接触线线条和弓网线条,并计算接触线线条和弓网线条之间的交点,并对交点位置属性进行分析,根据交点出现在弓条的位置区域进行故障判断,以准确判断出弓网运行状态是否安全。
6.为了实现以上目的,本发明采用的技术方案:一种基于orb算法的弓网运行状态检测方法,包括以下步骤:一、图像特征提取s1、基于特征方向计算改进的orb图像特征提取方法构建图像定位训练模型,并对所述图像定位训练模型进行训练,得到图像定位模型;本发明中,图像特征提取算法采用orb图像特征,orb是一种验证检测算子,所得到的特征点的性能在sifi和surf之间,但其速度是surf算法的10倍。
7.所述orb图像特征提取方法包括以下步骤:(1)orb角点检测:以当前像素点为基准,取邻域离散圆周上若干采样像素点,并从
采样像素点中检测其角点作为fast特征点,再在多层高斯金字塔寻找fast特征点作为orb特征;本发明中,orb特征采用的是fast特征,fast特征本身是不具有方向性的,所以在orb特征中添加对特征方向的计算。对于当前像素点,取邻域一般3*3离散圆周上若干采样像素点。角点是指若干采样像素点中至少有n个连续像素点要么大于当前像素点加上一个阈值,要么小于当前像素点减掉一个阈值。也就是fast特征点。
8.优选的,所述高斯金字塔采用不同尺度的高斯核进行平滑,并采用下采用方式降低图像分辨率。
9.本发明中,orb特征是在多层高斯金字塔寻找fast特征点。高斯金字塔包含两层含义,其一为采用不同尺度的高斯核进行平滑,其二采用下采用方式降低图像分辨率。
10.(2)fast角度计算:利用图像矩的方式计算特征点图像的重心,并将重心与特征点中心的夹角作为特征点的方向;本发明中,fast特征点本身不具有方向性,orb对fast特征做延伸,可以计算每个特征点的方向。orb中通过图像矩的方式计算,在一个3*3窗口内,角点中心p,与3*3窗口的重心c的夹角为角点的方向。
11.优选的,所述特征点的方向计算中,对于任意一个特征点p,其邻域像素的矩为:其中, x、y为坐标,p q的和等于几就为几阶矩,i(x,y)为特征点p点(x,y)处的灰度值;特征点图像的重心为:其中,m
10
为10阶矩,m
00
为零阶矩,m
01
为1阶矩;特征点中心与特征点图像的重心的夹角为fast特征点的方向:。
12.(3)orb特征描述:利用brief算法对orb特征进行描述,计算出二进制串的特征描述符;优选的,所述利用brief算法对orb特征进行描述中,首先在一个特征点的邻域内取31*31,选择n对像素点pi、qi(i=1,2,
…
,n);然后比较每个点对的灰度值的大小,如果i(pi)》 i(qi),则生成二进制串中的1,否则为0;所有的点对都比较后,生成长度为n的二进制串,n取128或者256。
13.本发明中,计算得到特征点和特征点的方向后,采用brief算法对orb特征进行描述,通过brief算法计算出二进制串的特征描述符。在一个特征点的邻域内一般取31*31,选择n对像素点pi、qi(i=1,2,
…
,n)。然后比较每个点对的灰度值的大小。如果i(pi)》 i(qi),则生成二进制串中的1,否则为0。所有的点对都进行比较,则生成长度为n的二进制串,n一般取128或者256。点对n采用p和q都符合(0,s2/25)的高斯分布。
14.优选的,所述利用brief算法对orb特征进行描述,还包括:通过旋转矩阵的点集
位置上比较点对的大小形成二进制串的描述符,所述旋转矩阵为;其中,s为特征点周围2n个点组成的矩阵,; 为邻域方向对应的旋转矩阵, ,为特征点求得的主方向。
15.本发明中,brief本身是没有旋转不变性的,为了方向不变性,需要给brief进行改进,这种方法称为“steer breif”。对于任何一个特征点来说,它的brief描述子是一个长度为n的二值码串,这个二值串是由特征点周围n个点对(2n个点)生成的,因此将这2n个点(xi,yi),i=1,2,
⋯
,2n(xi,yi),i=1,2,
⋯
,2n组成一个矩阵s。再使用邻域方向和对应的旋转矩阵,构建s的一个旋转矩阵。其中即为特征点求得的主方向。在新的点集位置上比较点对的大小形成二进制串的描述符。
16.(4)拟合直线:利用最小二乘法拟合直线,提取得到受电弓和接触线的线条。
17.优选的,所述利用最小二乘法拟合直线中,x和y之间的函数关系为: ,其中,最小二乘法的相关系数r为:。
18.二、受电弓和接触线定位s2、通过图像采集设备实时采集弓网图像,并输入给所述图像定位模型,以实现从所述弓网图像中依次定位受电弓roi区域、接触线roi区域;本发明中,图像采集设备安装在运行的机车上,实时采集运行机车的弓网图像,从而以实时检测弓网运行状态。图像采集设备为传感器,传感器包括单面阵相机和紫外燃弧模块。单面阵相机用于采集弓网图像;紫外燃弧模块用于识别弓网燃弧特性。
19.2.1、受电弓定位本发明中,受电弓定位的目的是定位到受电弓的具体位置,即roi区域,减少其他部件对进一步处理图像操作的干扰。受电弓roi区域的定位采用特征提取和svm方法实现。
20.所述定位受电弓roi区域,具体步骤为:s21、通过图像采集设备实时采集弓网图像,并将所述弓网图像输入所述图像定位模型中进行目标区域定位,并采用跟踪定位方法通过上一帧定位结果对当前帧定位进行优化;本发明中,受电弓的定位采用跟踪定位方式,利用上一帧定位结果对当前帧定位进行优化,以提供定位的精度。
21.s22、判断是否定位到目标区域;若是,则进入s25步骤;若否,则进入s23步骤;s23、对待测弓网图像进行全图搜索,并再次判断是否定位到目标区域;若是,则进入s25步骤;若否,则进入s24步骤;s24、判断前一帧是否有定位结果;若是,则利用前一帧的定位结果作为定位到的目标区域,并进入s25步骤;若否,则返回s21步骤输入下一待测图像进行目标区域定位;s25、输出目标区域定位结果,并返回s21步骤输入下一张待测弓网图像进行目标区域定位。
22.上述步骤的目标区域,为受电弓roi区域。
23.2.2、接触线定位当定位到所述受电弓roi区域时,从所述受电弓roi区域图像中,定位所述接触线roi区域;本发明中,接触线区域定位的目的是为了去除大部分的其他线条的干扰。接触线roi区域的定位采用特征提取和svm方法实现。
24.三、接触线线条和弓网线条s3、分别从所述受电弓roi区域和接触线roi区域中,提取得到弓网线条和接触线线条;3.1弓网线条提取本发明中,弓网线条提取包括roi设置、梯度计算、线条提取、线条过滤、直线拟合等几个步骤,具体如下:s311、输入受电弓roi区域图像,并以所述受电弓roi区域宽度的一半区域作为弓网线条提取roi区域图像;上述步骤中,为节省图像处理效率,只截取输入图像一半的区域进行后续算法处理。
25.s312、计算弓网线条提取roi区域图像在y方向的梯度信息;上述步骤中,计算输入图像在y方向的梯度信息,初步去除x方向的线条干扰。
26.s313、利用所述y方向的梯度信息进行线条提取;s314、利用线条的几何特征,对提取的线条进行过滤,最终至多保留一条线条;优选的,所述几何特征包括线条与x轴的角度、长度,线条与图像上边缘的距离;如果两条线条属于同一方向且其中心点的y坐标之间差别较小,则将两条线条组合成一条线条。
27.s315、判断过滤后的线条数是否大于0,若是,则进入s316步骤,若否,则进入s317步骤;s316、判断过滤后的线条数是否等于1,若是,则进入s318步骤;s317、判断上一帧是否有线条输出,若是,则利用上一帧结果,并进入s318步骤;若否,则返回s311步骤输入下一张受电弓roi区域图像进行弓网线条提取;s318、输出弓网线条。
28.3.2、接触线线条提取本发明中,从接触线的roi小图中进行导线的线条的提取,包括以下步骤;s321、输入接触线roi区域图像,并以该图像高度的一半区域作为接触线提取roi
区域图像;优选的,在接触线roi区域图像中,以其高度的1/2作为分界,将其上部分作为接触线提取roi区域图像。本发明根据定位结果输出的特性,接触线分布在区域小图的上半部分,即以检测图像的高度的1/2作为roi区域的分界,以节省图像处理效率。
29.s322、对接触线提取roi区域图像进行x方向梯度变换,同时将梯度图像转化成byte类型;上述步骤中,对图像进行预处理,进行了x方向梯度变换,去除水平线条干扰,同时将梯度图像转化成byte类型,转化为byte类型的目的是使梯度图像灰度值中的负数变成正数。
30.s323、在转化的byte类型图中提取线条,并在提取的线条中,将同时属于同一线条的多条分割线条进行连接;上述步骤中,对线条进行了提取以及预处理,预处理方式为,分割线条同时属于同一线条的多条线条进行连接。
31.s324、利用线条的几何特征,对线条进行筛选,得到线条的数量n;优选的,所述线条的几何特征包括粗细、长度、位置和斜率。上述步骤中,对线条进行筛选,具体根据线条的粗细、长度、位置、斜率等相应的几何特征进行线条筛选,最终通过下述方法,保留一条线条,作为接触线输出结果。
32.s325、判断线条的数量n是否大于0,若是,则进入s326步骤,若否,则进入s328步骤;s326、判断线条的数量n是否等于1,若是,则进入s329步骤,若否,则进入s327步骤;s327、判断上帧是否有线条输出;若是,则选择上帧结果最相近的线条,作为当前帧结果,并进入329步骤;若否,则选择最粗的线条输出,并进入s329步骤;s328、判断上帧是否有线条输出;若是,则利用上一帧结果,并进入s329步骤;若否,则返回s321步骤,输入另一张接触线roi区域图像进行接触线线条提取;s329、输出接触线线条,再返回s321步骤,输入另一张接触线roi区域图像进行接触线线条提取。
33.四、故障判断s4、计算所述弓网线条与所述接触线线条的交点,并根据所述交点在弓条的位置区域,输出弓网当前运行状态的属性信息。
34.当所述交点位于弓条中间的安全区域时,则输出弓网运行状态安全;当所述交点位于安全区域左右两侧的第一危险区域和第二危险区域时,输出弓网运行状态危险;当所述交点位于第一危险区域左侧的第一故障区域和第二危险区域右侧的第二故障区域时,输出弓网运行状态故障。
35.(1)计算交点本发明中,求取到导线轮廓拟合直线和受电弓轮廓上边缘拟合直线后,再求取两条轮廓拟合直线的交点。
36.具体交点计算方式如下:
已知导线上两点p1,p2,且导线轮廓线拟合直线表示方式如下,a1x b1y c1=0
ꢀꢀꢀꢀꢀꢀꢀꢀ
(1)受电弓轮廓线上边缘拟合直线上两点p3,p4,且其直线表示方式如下,a2x b2y c2=0
ꢀꢀꢀꢀꢀꢀꢀꢀ
(2)联立方程组(1)(2),且令b1=-1、b2=-1,可得x=(c1 y)/a1
ꢀꢀꢀꢀꢀꢀꢀ
(3)y=(a2c1-a1c2)/(a2-a1)
ꢀꢀꢀ
(4)根据已知坐标点,求解可得到a1, b1, c1等方程系数;进一步根据求得的方程系数求取交点。
37.(2)故障判断本发明中,可将弓条的位置区域划分为五个区域,中间为安全区域,中间两边靠近中间区域的为危险区域,弓条左右两端的区域为故障区域。
38.本发明的有益效果:本发明提供的弓网运行状态检测方法,利用改进的orb图像特征提取方法得到图像定位模型,并利用图像定位模型定位弓网图像中的受电弓roi区域以及接触线roi区域,再提取接触线线条和弓网线条,并计算接触线线条和弓网线条之间的交点,再对交点位置属性进行分析,根据交点出现在弓条的位置区域进行故障判断,以准确判断出弓网运行状态是否安全;本发明对弓网运行状态进行了实时监测,并能根据实时监测的结果提醒相关工作人员,减轻了相关工作人员的工作量。
附图说明
39.图1为本发明检测方法构架图;图2为本发明模型训练示意图;图3为本发明领域像素中心示意图;图4为本发明高斯金字塔示意图;图5为本发明受电弓定位示意图;图6为本发明目标定位流程示意图;图7为本发明接触线定位示意图;图8为本发明接触线线条提取流程图;图9为本发明一种图像采集原图ⅰ;图10为本发明一种图像采集原图ⅱ;图11为本发明接触线roi区域图ⅰ;图12为本发明接触线roi区域图ⅱ;图13为本发明x方向梯度图ⅰ;图14为本发明x方向梯度图ⅱ;图15为本发明byte类型图ⅰ;图16为本发明byte类型图ⅱ;图17为本发明线条提取图ⅰ;图18为本发明线条提取图ⅱ;
图19为本发明线条预处理图ⅰ;图20为本发明线条预处理图ⅱ;图21为本发明线条筛选图ⅰ;图22为本发明线条筛选图ⅱ;图23为本发明直线拟合图ⅰ;图24为本发明直线拟合图ⅱ;图25为本发明弓网线条提取流程图;图26为本发明弓网区域划分图;图27为本发明受电弓区域关键点示意图。
具体实施方式
40.以下将结合实施例和附图对本发明的构思、具体结构及产生的技术效果进行清楚、完整的描述,以充分地理解本发明的目的、特征和效果。
41.实施例1一种基于orb算法的弓网运行状态检测方法,如图1所示,包括以下步骤:s1、基于特征方向计算改进的orb图像特征提取方法构建图像定位训练模型,并对所述图像定位训练模型进行训练,得到图像定位模型,如图2所示;s2、通过图像采集设备实时采集弓网图像,并输入给所述图像定位模型,以实现从所述弓网图像中依次定位受电弓roi区域、接触线roi区域;s3、分别从所述受电弓roi区域和接触线roi区域中,提取得到弓网线条和接触线线条;s4、计算所述弓网线条与所述接触线线条的交点,并根据所述交点在弓条的位置区域,输出弓网当前运行状态的属性信息。
42.本实施中,利用改进的orb图像特征提取方法得到图像定位模型,并利用图像定位模型定位弓网图像中的受电弓roi区域以及接触线roi区域,再提取接触线线条和弓网线条,并计算接触线线条和弓网线条之间的交点,再对交点位置属性进行分析,根据交点出现在弓条的位置区域,准确分析出弓网是否存在故障;本发明对弓网运行状态进行了实时监测,并能根据实时监测的结果提醒相关工作人员,减轻了相关工作人员的工作量。
43.本实施例中,所述步骤s2中的受电弓roi区域和接触线roi区域定位,步骤s3中的弓网线条和接触线线条提取,均包括:通过跟踪定位方式,利用上一帧定位结果对当前帧的定位进行优化。
44.实施例2本实施例在实施例1的基础上,对s1步骤作进一步的阐述,受电弓roi区域的定位以及接触线roi区域的定位,均采用orb图像特征提取和svm方法。下面对orb图像特征提取方法做详细的介绍。
45.本实施例中,图像特征提取算法采用orb图像特征,orb是一种验证检测算子,所得到的特征点的性能在sifi和surf之间,但其速度是surf算法的10倍。
46.所述orb图像特征提取方法包括以下步骤:(1)orb角点检测
以当前像素点为基准,取邻域离散圆周上若干采样像素点,并从采样像素点中检测其角点作为fast特征点,再在多层高斯金字塔寻找fast特征点作为orb特征;本实施例中,orb特征采用的是fast特征,fast特征本身是不具有方向性的,所以在orb特征中添加对特征方向的计算。对于当前像素点,取邻域一般3*3离散圆周上若干采样像素点(如图3的p点表示当前像素位置,以3个像素点为半径,标号1-16的16个点表示圆周上采样的16个像素点),如图3所示。
47.角点是指16个像素中至少有n(n可以等于9,12等)个连续像素点要么大于当前像素点加上一个阈值,要么小于当前像素点减掉一个阈值。也就是fast特征点。orb特征是在多层高斯金字塔寻找fast特征点。
48.高斯金字塔包含两层含义,其一为采用不同尺度的高斯核进行平滑,其二采用下采用方式降低图像分辨率。高斯金字塔采用如图4格式所示。
49.(2)fast角度计算利用图像矩的方式计算特征点图像的重心,并将重心与特征点中心的夹角作为特征点的方向;本实施例中,fast特征点本身不具有方向性,orb对fast特征做延伸,可以计算每个特征点的方向。orb中通过图像矩的方式计算,在一个3*3窗口内,角点中心p,与3*3窗口的重心c的夹角为角点的方向。
50.对于任意一个特征点p来说,我们定义p的邻域像素的矩为:其中, x、y为坐标,p q的和等于几就为几阶矩,i(x,y)为特征点p点(x,y)处的灰度值;特征点图像的重心为:其中,m
10
为10阶矩,m
00
为零阶矩,m
01
为1阶矩;特征点中心与特征点图像的重心的夹角为fast特征点的方向:。
51.(3)orb特征描述利用brief算法对orb特征进行描述,计算出二进制串的特征描述符;本实施例中,计算得到特征点和特征点的方向后,采用brief算法对orb特征进行描述,通过brief算法计算出二进制串的特征描述符。在一个特征点的邻域内一般取31*31,选择n对像素点pi、qi(i=1,2,
…
,n)。然后比较每个点对的灰度值的大小。如果i(pi)》 i(qi),则生成二进制串中的1,否则为0。所有的点对都进行比较,则生成长度为n的二进制串,n一般取128或者256。点对n采用p和q都符合(0,s2/25)的高斯分布。
52.本实施例中,brief本身是没有旋转不变性的,为了方向不变性,需要给brief进行改进,这种方法称为“steer breif”。对于任何一个特征点来说,它的brief描述子是一个长度为n的二值码串,这个二值串是由特征点周围n个点对(2n个点)生成的,现在我们将这2n
个点(xi,yi),i=1,2,
⋯
,2n(xi,yi),i=1,2,
⋯
,2n组成一个矩阵s。
53.使用邻域方向和对应的旋转矩阵,构建s的一个旋转矩阵。。
54.其中即为特征点求得的主方向。在新的点集位置上比较点对的大小形成二进制串的描述符。
55.(4)利用最小二乘法拟合直线。
56.本实施例中,设x和y之间的函数关系为:,上式中有两个待定参数,a代表截距,b代表斜率。对于等精度测量所得到的n组数据,i=1,2
……
,n,值被认为是准确的,所有的误差只联系着。
57.用最小二乘法估计参数时,要求观测值yi的偏差的加权平方和为最小。对于等精度观测值的直线拟合来说,可使下式的值最小:令上式等于d,并对a,b分别求一阶偏导数:再求二阶偏导数:显然二阶偏导数均为非负数。令一阶偏导数为0:解得:
相关系数r:最小二乘法处理数据除给出a、b外,常常还给出相关系数r,r定义为:。
58.实施例3本实施例在实施例2的基础上对受电弓定位作进一步的阐述,本实施例中,如图5所示,矩形框区域为受电弓区域,受电弓定位的目的是定位到受电弓的具体位置,即roi区域,减少其他部件对进一步处理图像操作的干扰。如图6所示,定位受电弓roi区域包括以下步骤:s21、通过图像采集设备实时采集弓网图像,并将所述弓网图像输入所述图像定位模型中进行目标区域定位,并采用跟踪定位方法通过上一帧定位结果对当前帧定位进行优化;本发明中,受电弓的定位采用跟踪定位方式,利用上一帧定位结果对当前帧定位进行优化,以提供定位的精度。
59.s22、判断是否定位到目标区域;若是,则进入s25步骤;若否,则进入s23步骤;s23、对待测弓网图像进行全图搜索,并再次判断是否定位到目标区域;若是,则进入s25步骤;若否,则进入s24步骤;s24、判断前一帧是否有定位结果;若是,则利用前一帧的定位结果作为定位到的目标区域,并进入s25步骤;若否,则返回s21步骤输入下一待测图像进行目标区域定位;s25、输出目标区域定位结果,并返回s21步骤输入下一张待测弓网图像进行目标区域定位。
60.上述步骤的目标区域,为受电弓roi区域。
61.实施例4本实施例在实施例3的基础上对接触线定位和提取作进一步的阐述,如图7所示,矩形框为接触线的定位框,接触线区域定位的目的是为了去除大部分的其他线条的干扰。
62.本实施例中,从接触线的roi小图中进行导线的线条的提取,如图8所示,包括以下步骤;s321、输入接触线roi区域图像,如图9和10所示,并以该图像高度的一半区域作为接触线提取roi区域图像,如图11和12所示;优选的,在接触线roi区域图像中,以其高度的1/2作为分界,将其上部分作为接触线提取roi区域图像。本实施例根据定位结果输出的特性,接触线分布在区域小图的上半部分,即以检测图像的高度的1/2作为roi区域的分界,以节省图像处理效率。
63.s322、对接触线提取roi区域图像进行x方向梯度变换,如图13和14所示,同时将梯
度图像转化成byte类型,如图15和16所示;上述步骤中,对图像进行预处理,进行了x方向梯度变换,去除水平线条干扰,同时将梯度图像转化成byte类型。
64.s323、在转化的byte类型图中提取线条,如图17和18所示,并在提取的线条中,将同时属于同一线条的多条分割线条进行连接,如图19和20所示;上述步骤中,对线条进行了提取以及预处理,预处理方式为,分割线条同时属于同一线条的多条线条进行连接。
65.s324、利用线条的几何特征,对线条进行筛选,如图21和22所示,得到线条的数量n;优选的,所述线条的几何特征包括粗细、长度、位置和斜率。上述步骤中,对线条进行筛选,具体根据线条的粗细、长度、位置、斜率等相应的几何特征进行线条筛选,最终通过下述方法,保留一条线条,并进行直线拟合,如图23和24,直线拟合后作为接触线输出结果。
66.s325、判断线条的数量n是否大于0,若是,则进入s326步骤,若否,则进入s328步骤;s326、判断线条的数量n是否等于1,若是,则进入s329步骤,若否,则进入s327步骤;s327、判断上帧是否有线条输出;若是,则选择上帧结果最相近的线条,作为当前帧结果,并进入329步骤;若否,则选择最粗的线条输出,并进入s329步骤;s328、判断上帧是否有线条输出;若是,则利用上一帧结果,并进入s329步骤;若否,则返回s321步骤,输入另一张接触线roi区域图像进行接触线线条提取;s329、输出接触线线条,再返回s321步骤,输入另一张接触线roi区域图像进行接触线线条提取。
67.实施例5本实施例在实施例4的基础上对弓网线条提取作进一步的阐述,本实施例中,弓网线条提取包括roi设置、梯度计算、线条提取、线条过滤、直线拟合等几个步骤,如图25所示,具体如下:s311、输入受电弓roi区域图像,并以所述受电弓roi区域宽度的一半区域作为弓网线条提取roi区域图像;上述步骤中,为节省图像处理效率,只截取输入图像一半的区域进行后续算法处理。
68.s312、计算弓网线条提取roi区域图像在y方向的梯度信息;上述步骤中,计算输入图像在y方向的梯度信息,初步去除x方向的线条干扰。
69.s313、利用所述y方向的梯度信息进行线条提取;s314、利用线条的几何特征,对提取的线条进行过滤,最终至多保留一条线条;优选的,所述几何特征包括线条与x轴的角度、长度,线条与图像上边缘的距离;如果两条线条属于同一方向且其中心点的y坐标之间差别较小,则将两条线条组合成一条线条。
70.s315、判断过滤后的线条数是否大于0,若是,则进入s316步骤,若否,则进入s317步骤;
s316、判断过滤后的线条数是否等于1,若是,则进入s318步骤;s317、判断上一帧是否有线条输出,若是,则利用上一帧结果,并进入s318步骤;若否,则返回s311步骤输入下一张受电弓roi区域图像进行弓网线条提取;s318、输出弓网线条,并利用最小二乘法对弓网线条进行直线拟合。
71.上述步骤中,提取线条上的所有坐标点,利用最小二乘法进行直线拟合。
72.实施例6本实施例在实施例5的基础上作进一步的阐述,在接触线线条和弓网线条提取后,计算提取的接触线线条和弓网线条的交点,并根据交点在弓条的位置区域,输出弓网当前运行状态的属性信息。
73.优选的,所述弓条沿其长度方向划分五个区域,如图26和27所示,包括:位于弓条中间的安全区域,当接触线线条和弓网线条的交点落在该安全区域,输出弓网运行状态安全,安全区域左右两侧的第一危险区域和第二危险区域,当接触线线条和弓网线条的交点落在该危险区域,输出弓网运行状态危险;第一危险区域左侧的第一故障区域和第二危险区域右侧的第二故障区域,当接触线线条和弓网线条的交点落在该故障区域,输出弓网运行状态故障。
74.(1)计算交点本实施例中,求取到导线轮廓拟合直线和受电弓轮廓上边缘拟合直线后,再求取两条轮廓拟合直线的交点。
75.具体交点计算方式如下:已知导线上两点p1,p2,且导线轮廓线拟合直线表示方式如下,a1x b1y c1=0
ꢀꢀꢀꢀꢀꢀꢀꢀ
(1)受电弓轮廓线上边缘拟合直线上两点p3,p4,且其直线表示方式如下,a2x b2y c2=0
ꢀꢀꢀꢀꢀꢀꢀꢀ
(2)联立方程组(1)(2),且令b1=-1、b2=-1,可得x=(c1 y)/a1
ꢀꢀꢀꢀꢀꢀꢀ
(3)y=(a2c1-a1c2)/(a2-a1)
ꢀꢀꢀ
(4)根据已知坐标点,求解可得到a1, b1, c1等方程系数;进一步根据求得的方程系数求取交点。
76.(2)故障判断如图26和27所示,如果交点落在3区域,为安全,落在2,4区域为危险,落在1,5区域为故障。
77.以上对本发明的实施方式进行了具体说明,但本发明并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可作出种种等同变型或替换,这些等同或替换均包含在本发明权利要求所限定的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。