技术特征:
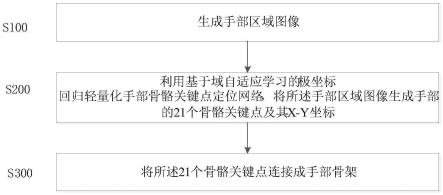
1.一种极坐标回归轻量化手部骨骼关键点定位方法,包括如下步骤:s100:生成手部区域图像;s200:利用基于域自适应学习的极坐标回归轻量化手部骨骼关键点定位网络,将所述手部区域图像生成手部的n个骨骼关键点及其x-y坐标;s300:将所述n个骨骼关键点连接成手部骨架。2.如权利要求1所述的方法,优选的,步骤s100进一步包括如下步骤:s101:将手势视频输入到手部检测网络,逐帧进行手部检测;s102:一旦检测到手部,提取手部区域图像;s103:将所提取的手部区域图像经图像缩放后得到固定分辨率的手部区域图像。3.如权利要求2所述的方法,步骤s101中的手部检测网络为单阶段目标检测网络。4.如权利要求1所述的方法,所述基于域自适应学习的极坐标回归轻量化手部骨骼关键点定位网络包括对抗学习网络和基于极坐标回归的关键点定位网络。5.如权利要求4所述的方法,所述对抗学习网络具体为:骨干网络模块初步生成出来的特征图需要根据极径、极角进行分类。6.如权利要求4所述的方法,所述基于极坐标回归的关键点定位网络包括:用于特征提取的骨干网络模块以及三个分类回归模块,所述三个分类回归模块是指极径回归头模块、极角回归头模块和极角分类头模块。7.如权利要求6所述的方法,其中,所述极径回归头模块负责对极径进行回归,n个关键点则对应有n个极径,输出为nx1的向量;所述极角回归头模块负责回归n个关键点对应极角的偏置;所述极角分类头模块负责对每一个关键点所落入的极角区间进行分类,得到具体的角度类别后,再利用该极角区间左端点对应的角度加上极角回归头模块得到的极角的偏置即可获得最终的极角。8.如权利要求7所述的方法,所述极角区间的划分数量也为n,其中,n为正整数且n大于等于20类。9.如权利要求4所述的方法,所述基于极坐标回归的关键点定位网络的损失函数表示为:其中:ri和分别表示预测极径和真实极径;ai和分别表示预测的极角偏置和真实的偏置;celoss表示交叉熵损失,p
cls
和t
cls
分别表示预测类别和真实类别。
技术总结
一种极坐标回归轻量化手部骨骼关键点定位方法,包括如下步骤:S100:生成手部区域图像;S200:利用基于域自适应学习的极坐标回归轻量化手部骨骼关键点定位网络,将所述手部区域图像生成手部的N个骨骼关键点及其X-Y坐标;S300:将所述N个骨骼关键点连接成手部骨架。该方法具有延时短、手部骨骼关键点定位准、支持实时生成动态手势骨架的特点,可广泛用于智能车、智能家居、机器人等领域的自然交互。机器人等领域的自然交互。机器人等领域的自然交互。
技术研发人员:张晓兰 杨传凯 任双赞 江涛 李旭 师一卿 张华 任婷 韩文博 郝东新 杨昌建 郭璨 师愉航 葛晨阳 周艳辉
受保护的技术使用者:西安交通大学
技术研发日:2022.08.17
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。