技术特征:
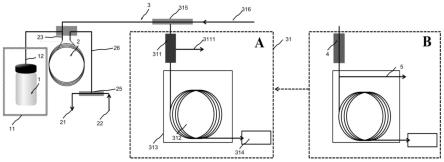
1.一种晶圆翘曲度测量方法,应用于行星式外延设备上,其特征在于,所述测量方法包括:通过激光发射器沿预定方向照射于卫星盘上待测晶圆的预设测量位置,利用位置传感器获取所述待测晶圆所反射的激光光斑信息,并根据所述激光光斑信息得到对应的激光反射角度;控制所述卫星盘进行自转,并控制石墨托盘进行公转,以第一预设采样频率对所述位置传感器进行数据采样,并通过分析采样数据得到所述待测晶圆的采样次数以及所述石墨托盘的采样次数;根据所述石墨托盘的采样次数计算出每次采样时所述石墨托盘的旋转角度,并基于所述石墨托盘的旋转角度和所述待测晶圆的采样次数计算出每次采样时所述待测晶圆的旋转角度,并计算出所述预设测量位置与所述待测晶圆中心的距离;根据每次采样时所述预设测量位置与所述待测晶圆中心的距离和所述激光反射角度计算出所述待测晶圆的翘曲度。2.根据权利要求1所述的晶圆翘曲度测量方法,其特征在于,在所述位置传感器与所述待测晶圆之间设有分光片,所述激光发射器所发射的激光通过所述分光片垂直折射于所述待测晶圆的预设测量位置上,所述位置传感器与终端设备电性连接、且所述位置传感器将其采集的采样数据传输至所述终端设备。3.根据权利要求1所述的晶圆翘曲度测量方法,其特征在于,基于所述石墨托盘的旋转角度和所述待测晶圆的采样次数计算出每次采样时所述待测晶圆的旋转角度的步骤包括:获取所述待测晶圆的边缘接触所述预设测量位置时的第一采样次数,并根据所述第一采样次数和所述石墨托盘的旋转角度计算出所述预设测量位置与所述卫星盘的中心点位置的第一距离;获取所述待测晶圆的边缘离开所述预设测量位置时的第二采样次数,并根据所述第二采样次数和所述石墨托盘的旋转角度计算出所述预设测量位置与所述卫星盘的中心点位置的第二距离;根据所述第一距离和所述第二距离分别计算出所述待测晶圆的第一旋转角度和第二旋转角度,并基于所述第一旋转角度和所述第二旋转角度计算出每次采样时所述待测晶圆的旋转角度。4.根据权利要求3所述的晶圆翘曲度测量方法,其特征在于,根据每次采样时所述预设测量位置与所述待测晶圆中心的距离和所述激光反射角度计算出所述待测晶圆的翘曲度的步骤包括:根据每次采样时所述石墨托盘的旋转角度计算出每次采样时所述预设测量位置与所述卫星盘中心点位置的距离;根据每次采样时所述待测晶圆的旋转角度和所述预设测量位置与所述卫星盘中心点位置的距离计算出每次采样时所述预设测量位置与所述待测晶圆的中心点位置的距离;基于每次采样时所述预设测量位置与所述待测晶圆的中心点位置的距离和所述激光反射角度计算出每次采样时所述待测晶圆的翘曲度,并对每次采样时所述待测晶圆的翘曲度进行平均值计算,以得到所述待测晶圆的翘曲度。5.根据权利要求4所述的晶圆翘曲度测量方法,其特征在于,所述激光反射角度的计算
公式为:;式中,、分别为位置传感器上激光光斑信息的坐标值,为位置传感器与预设测量位置的距离。6.根据权利要求5所述的晶圆翘曲度测量方法,其特征在于,每次采样时所述石墨托盘的旋转角度的计算公式为:;式中,为每次采样时石墨托盘的旋转角度,l为石墨托盘的采样次数。7.根据权利要求6所述的晶圆翘曲度测量方法,其特征在于,第一距离的计算公式为:;;式中,为第一采样次数时预设测量位置与石墨托盘的中心点位置的夹角,为第一采样次数,为第一距离,为预设测量位置与石墨托盘的中心点位置的距离,为卫星盘的中心点位置到石墨托盘的中心点位置的距离;所述第二距离的计算公式为:;;式中,为第二采样次数时预设测量位置与石墨托盘的中心点位置的夹角,为第二采样次数,为第二距离。8.根据权利要求7所述的晶圆翘曲度测量方法,其特征在于,所述第一旋转角度的计算公式为:;式中,为第一旋转角度,为待测晶圆的半径,为待测晶圆的中心点位置到卫星盘的中心点位置的距离;所述第二旋转角度的计算公式为:;式中,为第二旋转角度。9.根据权利要求8所述的晶圆翘曲度测量方法,其特征在于,所述每次采样时所述待测
晶圆的旋转角度的计算公式为:;式中,为待测晶圆的边缘从接触预设测量位置到离开预设测量位置时的采样次数。10.根据权利要求9所述的晶圆翘曲度测量方法,其特征在于,每次采样时所述预设测量位置与所述卫星盘中心点位置的距离的计算公式为:;式中,为每次采样时预设测量位置与卫星盘中心点位置的距离,为每次采样时所述石墨托盘的旋转角度;每次采样时所述预设测量位置与所述待测晶圆的中心点位置的距离的计算公式为:;式中,为每次采样时预设测量位置与待测晶圆的中心点位置的距离,为每次采样时所述待测晶圆的旋转角度;所述待测晶圆的翘曲度的计算公式为:;式中,为激光反射角度。
技术总结
本发明提供一种晶圆翘曲度测量方法,该方法包括:通过激光发射器沿预定方向照射于卫星盘上待测晶圆的预设测量位置,利用位置传感器获取待测晶圆所反射的激光光斑信息,并根据激光光斑信息得到对应的激光反射角度;控制卫星盘进行自转,并控制石墨托盘进行公转,以第一预设采样频率对位置传感器进行数据采样,得到待测晶圆的采样次数以及石墨托盘的采样次数;根据石墨托盘的采样次数计算出每次采样时石墨托盘的旋转角度,并基于石墨托盘的旋转角度和待测晶圆的采样次数计算出每次采样时待测晶圆的旋转角度,并计算出预设测量位置与待测晶圆中心的距离;根据每次采样时预设测量位置与待测晶圆中心的距离和激光反射角度计算出待测晶圆的翘曲度。待测晶圆的翘曲度。待测晶圆的翘曲度。
技术研发人员:黄文勇 倪旭东 颜华 马铁中
受保护的技术使用者:南昌昂坤半导体设备有限公司
技术研发日:2022.10.17
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。