技术特征:
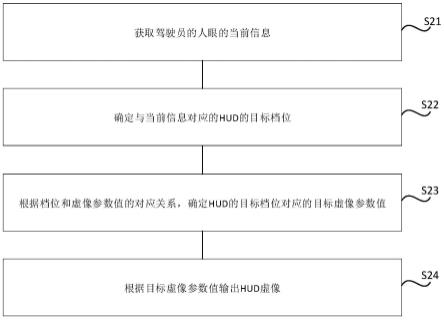
1.一种用于抬头显示器hud的调节方法,其特征在于,包括:获取驾驶员的人眼的当前信息;确定与所述当前信息对应的所述hud的目标档位;根据档位和虚像参数值的对应关系,确定所述hud的目标档位对应的目标虚像参数值;根据所述目标虚像参数值输出hud虚像;其中,所述档位和虚像参数值的对应关系通过如下方式确定得到:获取所述hud的档位中至少两个已标定档位对应的虚像参数值,其中,所述已标定档位的数量小于所述hud的档位总数;根据所述至少两个已标定档位对应的虚像参数值,确定参数确定模型的模型系数,以得到所述参数确定模型,其中,所述参数确定模型为所述hud的档位与虚像参数之间的线性关系模型;根据所述参数确定模型,确定所述hud的档位中待标定档位对应的虚像参数值。2.根据权利要求1所述的方法,其特征在于,所述根据所述至少两个已标定档位对应的虚像参数值,确定参数确定模型的模型系数,包括:基于最小二乘法,根据所述至少两个已标定档位对应的虚像参数值,确定参数确定模型的模型系数。3.根据权利要求2所述的方法,其特征在于,所述基于最小二乘法,根据所述至少两个已标定档位对应的虚像参数值,确定参数确定模型的模型系数,包括:通过如下公式确定所述参数确定模型的模型系数:其中,x
i
为所述hud的第i个已标定档位的档位值,y
i
为所述第i个已标定档位对应的虚像参数值,n为所述hud的档位总数,k、b为所述模型系数,其中k为斜率,b为截距。4.根据权利要求1所述的方法,其特征在于,所述虚像参数值至少包括如下参数值中的至少一种:虚像所在平面与所述hud的眼盒法线所在直线的交点,在世界坐标系中的位置的坐标;所述hud的眼盒中心点在世界坐标系下的位置的坐标;所述虚像的宽度和高度;所述虚像所在平面的法向量;所述hud的眼盒所在平面的法向量;所述hud的视场角;所述虚像的有效显示区域的分辨率。5.根据权利要求1所述的方法,其特征在于,所述已标定档位包括最低档位和最高档位,所述确定所述hud的档位中待标定档位对应的虚像参数值之前,所述方法还包括:根据所述档位总数、所述最低档位和所述最高档位,确定档位的步长;
根据档位的步长,确定得到所述待标定档位。6.根据权利要求1所述的方法,其特征在于,所述方法还包括通过如下方式标定所述hud的档位中已标定档位对应的虚像参数值:获取位于车辆外的标记物体在世界坐标系下的标记位置坐标;根据所述世界坐标系和二维影像坐标系之间的转换关系,得到所述标记物体在二维影像坐标系中的图像位置,输出表征所述图像位置的虚拟图像;调节所述参数确定模型中、设定档位的虚像参数值,直至从所述hud的视场角内观察到的所述虚拟图像和所述标记物体完全重合时,得到与设定档位的虚像参数值。7.一种用于抬头显示器hud的调节装置,其特征在于,包括:获取模块,用于获取驾驶员的人眼的当前信息;第一确定模块,用于确定与所述当前信息对应的所述hud的目标档位;第二确定模块,用于根据档位和虚像参数值的对应关系,确定所述hud的目标档位对应的目标虚像参数值,其中,基于表征hud的档位与虚像参数之间的线性关系的参数确定模型得到所述对应关系;输出模块,用于根据所述目标虚像参数值输出hud虚像;其中,所述档位和虚像参数值的对应关系通过如下方式确定得到:获取所述hud的档位中至少两个已标定档位对应的虚像参数值,其中,所述已标定档位的数量小于所述hud的档位总数;根据所述至少两个已标定档位对应的虚像参数值,确定参数确定模型的模型系数,以得到所述参数确定模型,其中,所述参数确定模型为所述hud的档位与虚像参数之间的线性关系模型;根据所述参数确定模型,确定所述hud的档位中待标定档位对应的虚像参数值。8.根据权利要求7所述的装置,其特征在于,所述第二确定模块采用如下方式确定参数确定模型的模型系数:基于最小二乘法,根据所述至少两个已标定档位对应的虚像参数值,确定参数确定模型的模型系数。9.一种非临时性计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1-6中任一项所述方法的步骤。10.一种电子设备,其特征在于,包括:存储器,其上存储有计算机程序;处理器,用于执行所述存储器中的所述计算机程序,以实现权利要求1-6中任一项所述方法的步骤。
技术总结
本公开涉及一种用于抬头显示器HUD的调节方法、装置及存储介质。用于抬头显示器HUD的调节方法,包括:获取驾驶员的人眼的当前信息;确定与所述当前信息对应的所述HUD的目标档位;根据档位和虚像参数值的对应关系,确定所述HUD的目标档位对应的目标虚像参数值;根据所述目标虚像参数值输出HUD虚像;其中,所述档位和虚像参数值的对应关系通过如下方式确定得到:获取所述HUD的档位中至少两个已标定档位对应的虚像参数值,根据所述至少两个已标定档位对应的虚像参数值,确定参数确定模型的模型系数,以得到所述参数确定模型;根据所述参数确定模型,确定所述HUD的档位中待标定档位对应的虚像参数值。应的虚像参数值。应的虚像参数值。
技术研发人员:李军华 潘晓旭 王玉龙 李昕
受保护的技术使用者:东软集团(大连)有限公司
技术研发日:2022.07.27
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。