1.本发明涉及图像处理技术,尤其是一种基于无人机和人工智能的垃圾数据识别方法。
背景技术:
2.在过去信息化技术尚未普及时,违章建筑管理部门通常采用人工巡视的手段来人工发现垃圾。近些年,也出现了利用摄像头进行远程监控的方法在各处进行监测,但是该种方法存在一些缺点,例如存在监测死角和资金投入较大等。这些方法虽然可以对垃圾影像进行采集,还需要精确地分类以及多样性的采集方式,在获取的影像数量较多或影像范围较大时,通过人工识别方式会产生巨大的工作量,简单的智能识别也无法完成所有任务,同时识别效率也相对较低。并且目前对于垃圾数据的识别多数仅停留在识别阶段,随着国家对垃圾分类的严格管控,已渐渐不能再适应人们的需求。
技术实现要素:
3.本发明的目的是通过提出一种基于无人机和人工智能的垃圾数据识别方法,以解决上述背景技术中提出的缺陷。
4.本发明采用的技术方案如下:提供一种基于无人机和人工智能的垃圾数据识别方法,包括如下步骤:s1.1:通过无人机作业,收集大数据量的高清视频影像数据,对视频进行帧间差处理,获取有效的高清图片;s1.2:对抽帧图像进行预处理,得到数据集;s1.3:通过对图像的特征提取进行网格划分,分类器确认网格内是否有垃圾存在;s1.4:对存在垃圾的单元格进行垃圾识别分类。
5.作为本发明的一种优选技术方案:所述s1.1中的帧间差处理图像算法如下:取连续两帧图像:;其中:;其中,为连续两帧图像之间的差分图像,和分别为前后相邻两帧像素的灰度值,为差分图像二值化时选取的阈值,表示前景,表示背景,β为抑制系数。
6.作为本发明的一种优选技术方案:所述s1.2中,获取经过帧间差处理的差分图像
后,对图像进行预处理,所述预处理步骤包括对图像进行颜色反转、滤波处理和增强处理。
7.作为本发明的一种优选技术方案:所述滤波处理以差分图像左下角的图像起始点为原点建立直角坐标系,点为使图像围成矩形最大的点,得到:;;其中,为点在整张图像中的像素均值;为点在整张图像中的像素方差。
8.作为本发明的一种优选技术方案:令围成差分图像的坐标系中矩形区域;得到矩形区域中任一点坐标;计算当前矩形区域内点的均值和方差:;;得到:;其中,为滤波后点的灰度值。
9.作为本发明的一种优选技术方案:通过canny边缘提取算法,增加多方位模板算子,对图像进行边缘检测处理。
10.作为本发明的一种优选技术方案:所述s1.3中,对预处理后的图像基于图像尺度进行网格划分:设原数据集设为m,宽度为x,高度为y,对于
∀
子图m∈m;原数据集m的划分格数w根据下式确定:;其中,为网格划分因子;为图中特征点数量。
11.作为本发明的一种优选技术方案:所述通过级联分类器对所述网格内的目标进行识别,设p为有垃圾存在的网格集合,n为无垃圾存在的网格集合,误检率为f,检测率为d,标准误检率为;初始值设,;令i=1;当时,i=i 1;,;当时,;训练一个有n个特征的级联分类器,训练得到集合和集合,直至达到目标分
类器的检测准确率和误检率。
12.作为本发明的一种优选技术方案:对有垃圾存在的网络集合,继续进行拆分和分类识别,直至每个网格内至多含有一个垃圾目标。
13.作为本发明的一种优选技术方案:所述s1.4中,针对有垃圾存在的网络集合,定义可回收垃圾输出为a,厨余垃圾输出为b,有害垃圾输出为c,其他垃圾输出为d;设分类误差为;定义各单元格内的权重系数满足:;其中,为权重系数;;;为t各弱分类器得到的分类样本的分类值。
14.本发明提供的基于无人机和人工智能的垃圾数据识别方法,与现有技术相比,其有益效果有:本发明通过无人机智能采集垃圾图像,节省了人力,减轻了劳动人员工作量;通过改进帧间差算法,获取高清有效的垃圾图片,并通过改进滤波算法进一步提高了图像的清晰度;通过划分网格并分类的方法将图像中的垃圾图像提取处理,便于对垃圾的智能识别;结合分类器对垃圾进行分类,便于垃圾的回收。
附图说明
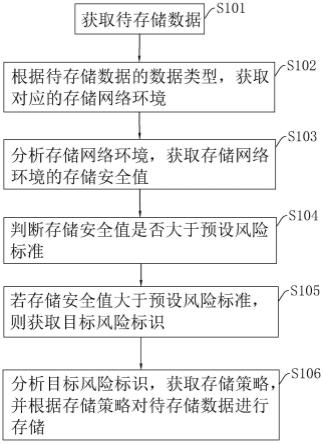
15.图1为本发明优选实施例的方法流程图。
具体实施方式
16.需要说明的是,在不冲突的情况下,本实施例中的实施例及实施例中的特征可以相互组合,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
17.参照图1,本发明优选实施例提供了一种基于无人机和人工智能的垃圾数据识别方法,包括如下步骤:s1.1:通过无人机作业,收集大数据量的高清视频影像数据,对视频进行帧间差处理,获取有效的高清图片;s1.2:对抽帧图像进行预处理,得到数据集;s1.3:通过对图像的特征提取进行网格划分,分类器确认网格内是否有垃圾存在;
s1.4:对存在垃圾的单元格进行垃圾识别分类。
18.所述s1.1中的帧间差处理图像算法如下:取连续两帧图像:;其中:;其中,为连续两帧图像之间的差分图像,和分别为前后相邻两帧像素的灰度值,为差分图像二值化时选取的阈值,表示前景,表示背景,β为抑制系数。
19.所述s1.2中,获取经过帧间差处理的差分图像后,对图像进行预处理,所述预处理步骤包括对图像进行颜色反转、滤波处理和增强处理。
20.所述滤波处理以差分图像左下角的图像起始点为原点建立直角坐标系,点为使图像围成矩形最大的点,得到:;;其中,为点在整张图像中的像素均值;为点在整张图像中的像素方差。
21.令围成差分图像的坐标系中矩形区域;得到矩形区域中任一点坐标;计算当前矩形区域内点的均值和方差:;;得到:;其中,为滤波后点的灰度值。
22.通过canny边缘提取算法,增加多方位模板算子,对图像进行边缘检测处理。
23.所述s1.3中,对预处理后的图像基于图像尺度进行网格划分:设原数据集设为m,宽度为x,高度为y,对于
∀
子图m∈m;原数据集m的划分格数w根据下式确定:
;其中,为网格划分因子;为图中特征点数量。
24.通过级联分类器对所述网格内的目标进行识别,设p为有垃圾存在的网格集合,n为无垃圾存在的网格集合,误检率为f,检测率为d,标准误检率为;初始值设,;令i=1;当时,i=i 1;,;当时,;训练一个有n个特征的级联分类器,训练得到集合和集合,直至达到目标分类器的检测准确率和误检率。
25.对有垃圾存在的网络集合,继续进行拆分和分类识别,直至每个网格内至多含有一个垃圾目标。
26.所述s1.4中,针对有垃圾存在的网络集合,定义可回收垃圾输出为a,厨余垃圾输出为b,有害垃圾输出为c,其他垃圾输出为d;设分类误差为;定义各单元格内的权重系数满足:;其中,为权重系数;;; 为t各弱分类器得到的分类样本的分类值。
27.本实施例中,假设一帧图像中含有一张废纸和一块果皮。
28.无人机采集各处垃圾视频数据,根据改进的帧间差处理算法提取视频数据中的垃圾图像数据:取含有这一张废纸和一块果皮的连续两帧图像:;其中:;其中,为连续两帧图像之间的差分图像,和分别为前后相邻两帧像素的灰度值,为差分图像二值化时选取的阈值,表示前景,表示背景,β为抑制系数。
29.对差分得到的垃圾图像进行预处理,包括图像的颜色反转、图像滤波和图像增强。
其中颜色反转数学表示公式如下:;反转像素值等于255减去当前像素值。
30.滤波处理步骤如下:以差分图像左下角的图像起始点为原点建立直角坐标系,点为使图像围成矩形最大的点,得到:;;其中,为点在整张图像中的像素均值;为点在整张图像中的像素方差。
31.令围成差分图像的坐标系中矩形区域;得到矩形区域中任一点坐标;计算当前矩形区域内点的均值和方差:;;得到:;其中,为滤波后点的灰度值。
32.通过canny边缘提取算法,增加多方位模板算子,对图像进行边缘检测处理。
33.对于预处理完成后的图像进行特征提取,根据提取的特征进行网格划分,将完整的图像按照如下步骤划分:设原数据集设为m,宽度为x,高度为y,对于
∀
子图m∈m;原数据集m的划分格数w根据下式确定:;其中,为网格划分因子;为图中特征点数量。
34.将图像划分为四个同样大小的网格,分别为左上角的网格、右上角的网格、左下角的网格、右下角的网格。
35.废纸和果皮均在右下角的网格中,废纸在网格左上角,果皮在网格右上角。
36.通过级联分类器确认划分的网格里是否存在垃圾目标:通过级联分类器对所述网格内的目标进行识别,设p为有垃圾存在的网格集合,n为无垃圾存在的网格集合,误检率为f,检测率为d,标准误检率为;初始值设,;令i=1;当时,i=i 1;,;
当时,;训练一个有n个特征的级联分类器,训练得到集合和集合,直至达到目标分类器的检测准确率和误检率。
37.检测结果,。
38.对有垃圾存在的网络集合,继续进行拆分和分类识别,直至每个网格内至多含有一个垃圾目标。
39.对继续进行划分得到四个同样大小的网格左上角、右上角、左下角、右下角。
40.检测得到,。
41.针对有垃圾存在的网络集合,定义可回收垃圾输出为a,厨余垃圾输出为b,有害垃圾输出为c,其他垃圾输出为d;设分类误差为;定义各单元格内的权重系数满足:;其中,为权重系数;;; 为t各弱分类器得到的分类样本的分类值。
42.针对网格、,分类器分别输出a和b,完成对垃圾的识别。
43.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
44.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。