一种应用在新能源汽车电机的empc控制方法
技术领域
1.本发明属于电机控制领域。
背景技术:
2.在新能源汽车应用中内置式永磁同步电机占主体地位,内置式永磁同步电机体积小、效率高、功率密度大、有相较于表贴电机更强的负载能力,可以满足汽车对于启动加速、爬坡等方面的需求。
3.在传统的控制算法中,pi算法占据主体地位,pi控制器以结构简单,易于实现广泛应用在电机驱动领域之中。但是为获得良好的控制性能,pi参数需要进行整定;内置式永磁同步电机是一个强耦合系统,当电机高速运行时,pi控制器不易于实现系统的解耦;pi控制器实现内置式永磁同步电机的mtpa(maximum torque per ampere,最大电流安培比)控制较为复杂;作为单输入单输出系统,采用级联结构的pi控制器不利于系统整定性能调优。这些问题说明了在遇到复杂工况下需要更好的算法。
4.在新的算法中模型预测是佼佼者,其中由于具备强大的约束处理能力使得显式模型预测控制技术(explicit model predictive control,empc)对新能源汽车的上电机的运用更具备优势。但是传统的empc算法也存在以下的问题:
5.1、empc算法只能处理线性模型且对模型参数的精确度要求较高,如果模型不精确可能会出现系统稳定误差等问题。
6.2、为了解决系统非线性和模型精度问题,传统算法通常采用将耦合项作为状态变量引入到系统当中,也即牺牲维度来保证系统精确,但这种做法会增加算法的复杂度。
7.3、模型预测算法的代价函数的参数权衡问题不好解决。
8.4、目前的算法应用很少利用empc约束处理来解决除过压保护和过流保护以外的问题,浪费了其强大的约束处理能力。
9.5、empc算法计算量大,传统的方式难以在工程上实现。
技术实现要素:
10.本发明是为了解决传统的empc算法存在的问题,现提供一种应用在新能源汽车电机的empc控制方法。
11.一种应用在新能源汽车电机的empc控制方法,包括以下步骤:
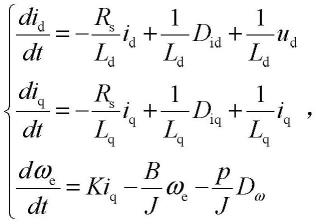
12.步骤一:对内置式永磁同步电机的数学方程进行整合获得电机数学模型:
13.14.其中,d
id
和d
iq
分别为直轴和交轴电流扰动量,d
ω
为速度扰动量,ld和lq分别为直轴和交轴同步电感值,id和iq分别为直轴和交轴同步电流值,ud为直轴同步电压值,ωe为转子电角速度,b为摩擦系数,j为转动惯量,rs为定子电阻值,p为电机极对数,ψf为转子永磁体产生的转子磁链;
15.步骤二:根据电机数学模型搭建观测器模型:
[0016][0017]
其中,观测状态变量其中,观测状态变量和分别为id、iq和ωe的观测值,和分别为d
id
、d
iq
和d
ω
的观测值,
[0018][0019][0020][0021]
u为观测器的输入量,t为参数矩阵,为观测输出变量,y为实际输出变量;
[0022]
步骤三:利用步骤二搭建的观测器模型观测获得和
[0023]
步骤四:采集电机的id和iq和ωe,然后将id、iq、ωe、和以及转子电角速度的给定值ω
eref
均输入至empc控制器中,获得empc控制器的输出结果,完成对empc控制器的控制。
[0024]
进一步的,上述步骤一中内置式永磁同步电机的数学方程为:
[0025][0026]
其中,uq为交轴同步电压值,t
l
为负载转矩。
[0027]
进一步的,上述直轴电流扰动量d
id
的表达式为:
[0028]did
=ωel
qiq
;
[0029]
交轴电流扰动量d
iq
的表达式为:
[0030]diq
=-(ωeldid ωeψf);
[0031]
速度扰动量d
ω
的表达式为:
[0032][0033]
进一步的,上述empc控制器模型为:
[0034][0035]
其中,empc控制器的状态变量empc控制器的直轴和交轴输出结果u(k)=[u
dref
(k) u
qref
(k)]
t
,y(k)为过程输出变量;
[0036][0037][0038]
进一步的,上述步骤四具体为:
[0039]
获取mtpa约束条件,并根据该mtpa约束条件获得pwa仿射空间集合,
[0040]
查找empc控制器的状态变量所属的pwa仿射空间,
[0041]
在empc控制器的状态变量所属pwa仿射空间下,利用下式计算获得k时刻empc控制器的直轴和交轴输出结果u
dref
(k)和u
qref
(k):
[0042]
u=fix gi,
[0043]
其中,empc控制器输出矩阵其中,empc控制器输出矩阵n
p
为预测时域上限,
[0044]
empc控制器状态变量
[0045]fi
和gi分别为mpt3工具箱生成的系数矩阵和常数矩阵,i为状态变量所属pwa仿射空间的编号。
[0046]
进一步的,mtpa约束条件为:
[0047][0048]
进一步的,上述步骤三所述观测器为伦伯格观测器。
[0049]
进一步的,上述步骤二电机数学模型搭建观测器的模型中a
ob-tc表示观测器的闭环极点,当满足:
[0050]
|(a
ob-tc)-λi|=0能够获得参数矩阵t,
[0051]
其中,λ为观测器观测环的闭环极点,i为与a
ob-tc同阶的单位矩阵。
[0052]
进一步的,上述参数矩阵t用于改变观测环的观测极点,使观测环极点位于单位圆
内。
[0053]
进一步的,empc控制器的约束部分为:
[0054]gi
u≤w ex(k),
[0055]
其中,w为约束条件的常数项矩阵,e为状态变量的系数矩阵。
[0056]
本发明通过上述的方式实现了如下的有益效果:
[0057]
1、通过伦伯格扰动观测器对扰动项的观测,解决了内置式永磁同步电机数学模型强耦合的问题,而且使系统具备更强的鲁棒性。
[0058]
2、由于各个控制环中将多个非线性项归为一个扰动项,使得系统模型得到大大的精简,也使得算法本身变得容易,更具备操作性。
[0059]
3、利用empc本身的约束处理能力处理处理mtpa约束,更好的利用了empc的约束处理能力。
[0060]
4、由于电流轨迹由empc约束确定,所以系统只需跟随速度给定,代价函数的参数矩阵只含有一个参数,无需参数权衡。
[0061]
5、由于模型得到精简,算法变得简便,使得empc算法本身更易在工程上得到实现。
附图说明
[0062]
图1为empc控制器原理结构图;
[0063]
图2为empc控制器内部控制流程图;
[0064]
图3为一种应用在新能源汽车电机的empc控制方法流程图;
[0065]
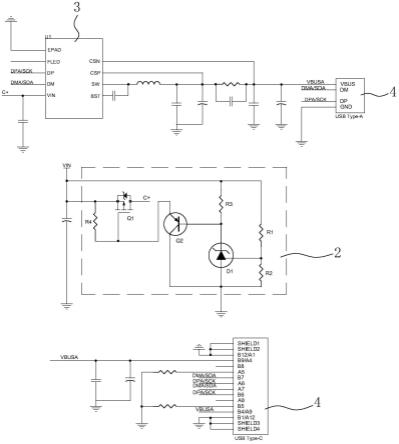
图4为pmsm控制系统硬件结构示意图。
具体实施方式
[0066]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其它实施例,都属于本发明保护的范围。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
[0067]
具体实施方式一:参照图1至图4具体说明本实施方式,本实施方式所述的一种应用在新能源汽车电机的empc控制方法,包括以下步骤:
[0068]
步骤一:内置式永磁同步电机的数学方程为:
[0069][0070]
对上述内置式永磁同步电机的数学方程进行整合获得电机数学模型:
[0071][0072]
上述公式中,
[0073]did
和d
iq
分别为直轴和交轴电流扰动量,表达式如下:
[0074]did
=ωel
qiq
,d
iq
=-(ωeldid ωeψf),
[0075]dω
为速度扰动量,表达式如下:
[0076][0077]
ld和lq分别为直轴和交轴同步电感值,id和iq分别为直轴和交轴同步电流值,ud为直轴同步电压值,ωe为转子电角速度,b为摩擦系数,j为转动惯量,rs为定子电阻值,p为电机极对数,ψf为转子永磁体产生的转子磁链,其中,uq为交轴同步电压值,t
l
为负载转矩。
[0078]
步骤二:根据电机数学模型搭建伦伯格观测器模型:
[0079][0080]
其中,观测状态变量其中,观测状态变量和分别为id、iq和ωe的观测值,和分别为d
id
、d
iq
和d
ω
的观测值,
[0081][0082][0083][0084]
u为观测器的输入量,t为参数矩阵,为观测输出变量,y为实际输出变量。
[0085]
其中a
ob-tc表示观测器的闭环极点,当满足:
[0086]
|(a
ob-tc)-λi|=0能够获得参数矩阵t,
[0087]
其中,λ为观测器观测环的闭环极点,i为与a
ob-tc同阶的单位矩阵,t为参数矩阵,
用于改变观测环的观测极点,使观测环极点位于单位圆内。
[0088]
步骤三:利用步骤二搭建的观测器模型观测获得和
[0089]
步骤四:建立empc控制器模型:
[0090][0091]
其中,empc控制器的状态变量empc控制器的直轴和交轴输出结果u(k)=[u
dref
(k) u
qref
(k)]
t
,y(k)为过程输出变量;
[0092][0093][0094]
采集电机的id和iq和ωe,然后将id、iq、ωe、和以及转子电角速度的给定值ω
eref
均输入至empc控制器中。
[0095]
empc控制器的约束部分为:
[0096]gi
u≤w ex(k),
[0097]
其中,w为约束条件的常数项矩阵,e为状态变量的系数矩阵。
[0098]
内置式永磁同步电机的mtpa曲线可以被定义为:
[0099][0100]
经过一阶泰勒展开后可得到mtpa约束条件:
[0101][0102]
根据上式可知这是一个非线性约束,而empc只能处理线性约束,所以empc控制器的状态变量中加入了
[0103]
根据上述mtpa约束条件获得pwa仿射空间集合,查找empc控制器的状态变量所属的pwa仿射空间。在empc控制器的状态变量所属pwa仿射空间下,利用下式计算获得k时刻empc控制器的直轴和交轴输出结果u
dref
(k)和u
qref
(k):
[0104]
u=fix gi,
[0105]
其中,empc控制器输出矩阵
[0106]np
为预测时域上限,
[0107]
empc控制器状态变量
[0108]fi
和gi分别为mpt3工具箱生成的系数矩阵和常数矩阵,i为状态变量所属pwa仿射
空间的编号。
[0109]
获得k时刻empc控制器的直轴和交轴输出结果u
dref
(k)和u
qref
(k)后,即完成对empc控制器的控制。
[0110]
之后对empc控制器的直轴和交轴输出结果u
dref
(k)和u
qref
(k)进行反park变换之后输入至svpwm中,最后经过逆变器的控制信号输入至电机中实现对电机的控制。
[0111]
图4所示为pmsm伺服驱动系统硬件结构框图。该驱动控制系统主要包括pmsm模块、主功率电路、检测电路、控制电路和驱动电路等。
[0112]
系统采用infineon32位mcu芯片xmc4500作为主控芯片,该芯片主频为120m,存储器容量高达1024k,同时具有丰富的外设,i/o引脚功能可以自定义,足以实现内置式永磁同步电机的empc控制。
[0113]
主功率电路采用三相桥式整流和逆变电路;检测电路包括霍尔电流检测以及旋转变压器位置检测,通过内部adc和spi同步串行通讯反馈到单片机。单片机内执行全速域运行的mpc算法,由ccu8产生pwm信号经过光耦隔离的驱动电路作用于三相逆变桥,产生作用于电机的svpwm信号。
[0114]
虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其它所述实施例中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。